一种基于智能化技术的工业搬运机器人及其搬运方法与流程
本发明涉及工业机器人,具体为一种基于智能化技术的工业搬运机器人及其搬运方法。
背景技术:
1、搬运机器人是可以进行自动化搬运作业的工业机器人,搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动,搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域。
2、现有的工业搬运机器人存在的缺陷是:
3、1、专利文件jp2017109256a公开了一种搬运机器人及搬运装置,“该承载机器人10包括臂部11和支撑部12,支撑部12将臂部11支撑成能够升降和旋转。用于使支撑部12与臂部11一起沿着水平表面在行进方向上行进的行进马达12m1、用于使臂部11相对于支撑部12提升的提升马达12m2和用于使臂部11相对于支撑部12旋转的旋转马达12m3从垂直方向观察时彼此不重叠,并且从与垂直方向和行进方向两者正交的正交方向观察时彼此不重叠。”但是该搬运装置可以对搬运的货物进行阻挡,容易出现货物因为不稳定而掉落。
4、2、专利文件cn219525519u公开了一种货物搬运工业机器人,但是该机器人在进行使用时,缺少对货物的阻挡结构,且阻挡结构不便于进行收取。
5、3、专利文件cn219543200u公开了一种具有碰撞保护功能的工业机器人,但是该工业机器人中缺少阻挡结构,且阻挡结构的高度不可以根据货物高度进行调节。
6、4、专利文件cn219542465u公开了一种差压铸造自动化抓手,但是该自动化抓手,缺少货物的阻挡结构,且不可以根据货物的长度进行相应的调整。
技术实现思路
1、本发明的目的在于提供一种基于智能化技术的工业搬运机器人及其搬运方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于智能化技术的工业搬运机器人,包括夹板,所述夹板的外侧对称安装有驱动组件,且驱动组件起到驱动阻挡结构的作用,所述驱动组件包括固定块,所述固定块的一侧开设有连接槽,所述固定块的内部开设有第二安装槽,所述第二安装槽的内部设置有电动伸缩杆;
3、所述连接槽的内部活动安装有移动杆,所述移动杆的一侧开设有安装腔,所述安装腔的内部安装有阻挡杆。
4、优选的,所述电动伸缩杆的输出端与移动杆的背面相连接,电动伸缩杆可以带动移动杆滑动,阻挡杆通过转动轴体与安装腔的内壁活动连接,移动杆的顶部和底部对称安装有滑杆,且滑杆与连接槽的内壁滑动连接,固定块的两侧对称安装有滑块,且滑块使固定块能够滑动安装。
5、优选的,所述固定块的内侧通过滑块设置有夹持搬运组件,夹持搬运组件用于将货物进行夹持,夹持搬运组件包括夹板,夹板的外侧开设有滑槽,滑槽的内部开设有固定孔,夹板的底部安装多个有夹爪,夹爪用于将货物重量支撑。
6、优选的,所述夹板的顶部设置有传动组件,传动组件用于将夹板进行传动,传动组件包括安装板,安装板的底部设置有安装块,安装块的外侧开设有第一安装槽,第一安装槽的内部活动安装有活动杆,活动杆的一端通过轴体安装有第一连接杆,第一连接杆的顶端安装有连接件本体,安装块的顶部安装有安装板,安装板的顶部贯穿安装有限位筒,限位筒的内部设置有活动轴,且活动轴可以在限位筒的内部上下滑动,活动杆的底部安装有安装杆,安装杆的底端安装有第二连接杆,且第二连接杆的底部与夹板相连接。
7、优选的,所述安装板的顶部安装有连接板,连接板的顶部安装有安装筒,安装筒的内部设置有第二液压杆,且第二液压杆的输出端与活动轴的顶端相连接,安装筒的正面设置有活动连接件,活动连接件使安装筒可以被驱动,调整使用角度。
8、优选的,所述活动连接件的内侧活动安装有驱动臂,驱动臂的一端设置有支撑臂,支撑臂的一侧安装有第一液压杆,第一液压杆的输出端与驱动臂的底部相连接,且第一液压杆用于将驱动臂进行驱动。
9、优选的,所述支撑臂的底部设置有转动座,转动座的底部设置有转动机构,转动机构通过内部的驱动电机带动转动座进行移动,转动机构的底部安装有移动机构,移动机构的一侧安装有散热窗,移动机构的底部安装有安装底座。
10、优选的,所述该工业搬运机器人的搬运方法如下:
11、s1、该首先将该搬运机器人移动到需要进行使用时,利用第一液压杆将液压能转化为动能,带动驱动臂进行活动,利用驱动臂使夹板对需要搬运的货物进行夹持,同时夹爪位于物品的底部,用来对货物进行支撑。
12、s2、夹持之后,可以利用电动伸缩杆将电能转化为动能,带动输出端的移动杆进行移动,当移动杆的一侧通过安装腔转动安装的阻挡杆移出连接槽时,阻挡杆可以通过转动与安装腔垂直,从而将夹持搬运组件上的货物进行阻挡,防止货物在进行搬运时出现滑动而掉落。
13、s3、同时固定块是通过滑块进行在滑槽内部滑动,改变固定块的高度,从而使阻挡杆对货物的阻挡高度进行调节,便于对不同夹持搬运组件上的货物进行阻挡。
14、优选的,在所述s1中还包括如下步骤:
15、s11、夹板和夹爪进行活动夹持时,是通过第二液压杆将液压能转化为动能,从而带动输出端的活动轴进行上下移动,由于活动轴与连接件本体相连接,由连接件本体带动底部的第一连接杆和活动杆活动,从而使安装杆通过第二连接杆安装的夹板活动对货物进行夹持。
16、与现有技术相比,本发明的有益效果是:
17、1、本发明中将第二安装槽内部的电动伸缩杆打开,电动伸缩杆将电能转化为动能,带动固定块在连接槽的内部向前滑动,移动杆的内部通过安装腔安装有阻挡杆,当移动杆向前移动时,阻挡杆可以从安装腔的内部转动到外侧,使阻挡杆转动到货物的前方,用来对阻挡杆进行遮挡,防止该机器人在对货物进行搬运时掉落而导致货物损坏。
18、2、本发明中的阻挡杆不需要使用时,将阻挡杆转动到安装腔的内部,然后通过电动伸缩杆带动移动杆向后移动,使移动杆完全进入到连接槽的内部,使阻挡杆也不会被转动,使该桩阻挡结构方便收取。
19、3、本发明中当电动伸缩杆带动该阻挡结构移动时,可以根据货物的长度来对该阻挡结构的使用长度进行调整,由于滑块和滑槽相嵌合,从而使夹持组件的使用高度能够进行滑动调节,方便对不同高度的货物进行阻挡,滑块通过固定螺栓将其固定,固定孔为固定螺栓提供固定的空间。
20、4、本发明中当利用阻挡杆对货物进行阻挡时,由于阻挡杆是通过电动伸缩杆带动,阻挡杆位于货物的前方对货物进行阻挡,当存在不同长度的货物使用时,也可以利用电动伸缩杆伸缩不同的长度,来对不同长度的货物进行阻挡。
技术特征:
1.一种基于智能化技术的工业搬运机器人,包括夹板(23),其特征在于:所述夹板(23)的外侧对称安装有驱动组件,且驱动组件起到驱动阻挡结构的作用,所述驱动组件包括固定块(27),所述固定块(27)的一侧开设有连接槽(30),所述固定块(27)的内部开设有第二安装槽(28),所述第二安装槽(28)的内部设置有电动伸缩杆(29);
2.根据权利要求1所述的一种基于智能化技术的工业搬运机器人,其特征在于:所述电动伸缩杆(29)的输出端与移动杆(32)的背面相连接,电动伸缩杆(29)可以带动移动杆(32)滑动,阻挡杆(35)通过转动轴体与安装腔(34)的内壁活动连接,移动杆(32)的顶部和底部对称安装有滑杆(33),且滑杆(33)与连接槽(30)的内壁滑动连接,固定块(27)的两侧对称安装有滑块(31),且滑块(31)使固定块(27)能够滑动安装。
3.根据权利要求1所述的一种基于智能化技术的工业搬运机器人,其特征在于:所述固定块(27)的内侧通过滑块(31)设置有夹持搬运组件,夹持搬运组件用于将货物进行夹持,夹持搬运组件包括夹板(23),夹板(23)的外侧开设有滑槽(24),滑槽(24)的内部开设有固定孔(25),夹板(23)的底部安装多个有夹爪(26),夹爪(26)用于将货物重量支撑。
4.根据权利要求3所述的一种基于智能化技术的工业搬运机器人,其特征在于:所述夹板(23)的顶部设置有传动组件,传动组件用于将夹板(23)进行传动,传动组件包括安装板(13),安装板(13)的底部设置有安装块(17),安装块(17)的外侧开设有第一安装槽(18),第一安装槽(18)的内部活动安装有活动杆(20),活动杆(20)的一端通过轴体安装有第一连接杆(19),第一连接杆(19)的顶端安装有连接件本体(16),安装块(17)的顶部安装有安装板(13),安装板(13)的顶部贯穿安装有限位筒(14),限位筒(14)的内部设置有活动轴(15),且活动轴(15)可以在限位筒(14)的内部上下滑动,活动杆(20)的底部安装有安装杆(21),安装杆(21)的底端安装有第二连接杆(22),且第二连接杆(22)的底部与夹板(23)相连接。
5.根据权利要求4所述的一种基于智能化技术的工业搬运机器人,其特征在于:所述安装板(13)的顶部安装有连接板(12),连接板(12)的顶部安装有安装筒(9),安装筒(9)的内部设置有第二液压杆(11),且第二液压杆(11)的输出端与活动轴(15)的顶端相连接,安装筒(9)的正面设置有活动连接件(10),活动连接件(10)使安装筒(9)可以被驱动,调整使用角度。
6.根据权利要求5所述的一种基于智能化技术的工业搬运机器人,其特征在于:所述活动连接件(10)的内侧活动安装有驱动臂(8),驱动臂(8)的一端设置有支撑臂(6),支撑臂(6)的一侧安装有第一液压杆(7),第一液压杆(7)的输出端与驱动臂(8)的底部相连接,且第一液压杆(7)用于将驱动臂(8)进行驱动。
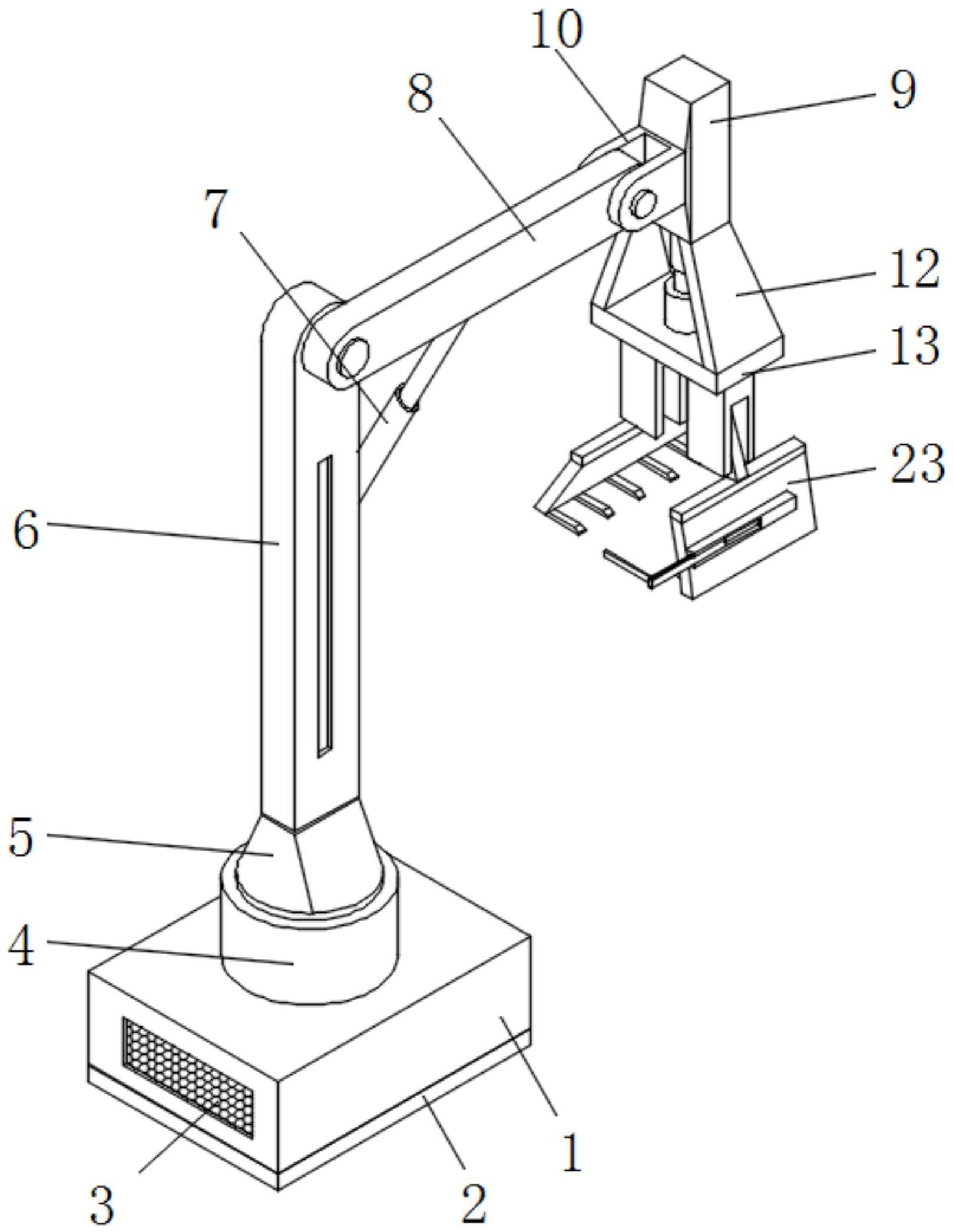
7.根据权利要求6所述的一种基于智能化技术的工业搬运机器人,其特征在于:所述支撑臂(6)的底部设置有转动座(5),转动座(5)的底部设置有转动机构(4),转动机构(4)通过内部的驱动电机带动转动座(5)进行移动,转动机构(4)的底部安装有移动机构(1),移动机构(1)的一侧安装有散热窗(3),移动机构(1)的底部安装有安装底座(2)。
8.根据权利要求1-7任意一项所述的一种基于智能化技术的工业搬运机器人的使用方法,其特征在于,所述该工业搬运机器人的搬运方法如下:
9.根据权利要求8所述的一种基于智能化技术的工业搬运机器人的使用方法,其特征在于,在所述s1中还包括如下步骤:
技术总结
本发明公开了一种基于智能化技术的工业搬运机器人,包括夹板,所述夹板的外侧对称安装有驱动组件,且驱动组件起到驱动阻挡结构的作用,所述驱动组件包括固定块,所述固定块的一侧开设有连接槽,所述固定块的内部开设有第二安装槽,所述第二安装槽的内部设置有电动伸缩杆,所述连接槽的内部活动安装有移动杆,所述移动杆的一侧开设有安装腔,所述安装腔的内部安装有阻挡杆。本发明移动杆的内部通过安装腔安装有阻挡杆,当移动杆向前移动时,阻挡杆可以从安装腔的内部转动到外侧,使阻挡杆转动到货物的前方,用来对阻挡杆进行遮挡,防止该机器人在对货物进行搬运时掉落而导致货物损坏。
技术研发人员:邓力铭
受保护的技术使用者:江苏科钛机器人有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!