一种真空环境下晶圆传送机械臂异常监测方法及系统与流程
本发明涉及真空晶圆传送,具体是一种真空环境下晶圆传送机械臂异常监测方法及系统。
背景技术:
1、在非真空条件下,晶圆传送机械臂在传送晶圆的过程中,可能会发生一些异常,例如:机械臂的传动部件有磨损或缺乏润滑,导致摩擦增大,产生不正常的声音;机械臂的连接部件出现松动或断裂,造成部件碰撞或摆动,产生异常声音;机械臂的传送链条或导轨有问题或异常时可能产生异常声音;而且每种异常声音的特征是不相同的,因此,有经验的技术人员可以根据晶圆传送机械臂的不同声音来判断传送过程是否发生异常以及异常的原因等;
2、然而在对晶圆的清洁性具有严格要求的情况下,需要将晶圆传送机械臂放置在真空无尘环境中进行晶圆传送,而真空中是无法传播声音的,因此技术人员无法根据晶圆传送机械臂产生的声音来判断异常情况,从而增加了晶圆传送的风险;
3、申请公开号为cn116394251a的中国专利提供一种晶圆搬运机器人及其故障检测方法,以及一种半导体设备。晶圆搬运机器人包括垂直臂、水平臂、末端执行部、第一姿态传感器、第二姿态传感器及控制器,水平臂一端与垂直臂相连接,另一端与末端执行部相连接,第一姿态传感器设置于垂直臂上,第二姿态传感器设置于水平臂上,控制器与第一姿态传感器及第二姿态传感器相连接,以基于第一姿态传感器及第二姿态传感器监测到的晶圆搬运机器人的局部及整体振动频率分布、波形特性、幅值、温度和水平状态参数中的若干个,判断晶圆搬运机器人是否发生故障;但该发明并未能考虑到故障的原因和故障级别的区分;
4、为此,本发明提出一种真空环境下晶圆传送机械臂异常监测方法及系统。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种真空环境下晶圆传送机械臂异常监测方法及系统,解决了真空中无法传播声音,导致监测人员无法根据声音判断晶圆传送过程是否发生异常的问题。
2、为实现上述目的,第一方面,本发明提出一种真空环境下晶圆传送机械臂异常监测方法,包括以下步骤:
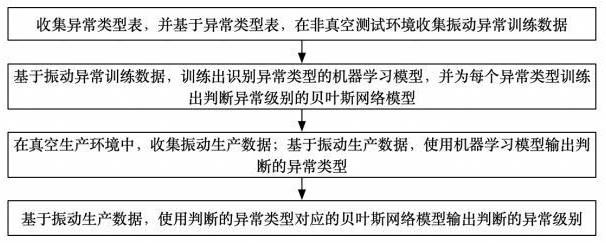
3、步骤一:收集异常类型表,并基于异常类型表,在非真空测试环境收集振动异常训练数据;其中,所述异常类型表包括晶圆传送机械臂在传送晶圆过程中,可能出现的会产生区别声音特征的异常类型,以及各个异常类型对应的异常级别;
4、所述区别声音特征为区别于正常的运送过程中会产生的声音的异常的声音特征;
5、在所述非真空测试环境,测试人员预先选择n个具有不同异常类型和不同异常级别的测试晶圆传送机械臂,每个测试晶圆传送机械臂,分别在非真空环境中使用不同速度和加速度,完成晶圆传送的任务,且在每次晶圆传送过程中,实时收集测试晶圆传送机械臂产生的振动异常训练数据;其中,n为选择的测试晶圆传送机械臂的数量;
6、步骤二:基于振动异常训练数据,训练出识别异常类型的机器学习模型,并为每个异常类型训练出判断异常级别的贝叶斯网络模型;
7、步骤三:在真空生产环境中,收集振动生产数据;基于振动生产数据,使用机器学习模型输出判断的异常类型;
8、步骤四:基于振动生产数据,使用判断的异常类型对应的贝叶斯网络模型输出判断的异常级别;
9、收集所述振动异常训练数据的方式包括:
10、在每个测试晶圆传送机械臂上预先安装振动传感器、速度传感器以及加速度传感器,且振动传感器实时收集测试晶圆传送机械臂产生的振动波形,速度传感器实时收集测试晶圆传送机械臂的速度,以及加速度传感器实时收集测试晶圆传送机械臂的加速度;
11、在测试晶圆传送机械臂每次进行晶圆传送时,测试人员实时根据测试晶圆传送机械臂所发出的声音,判断是否发生异常,并将判断发生异常的时间节点标记为异常开始,再继续判断声音是否正常,并将判断声音正常的时间节点标记为异常结束;在晶圆传送过程中,包括若干组异常时间段,每组所述异常时间段为从标记为异常开始的时间节点开始至下一个标记为异常结束的时间节点结束;每两组异常时间段之间的时间段表示为非异常时间段;
12、预设训练波形时长;
13、对于每组异常时间段和非异常时间段,分别按时间顺序划分出异常训练数据集合和非异常训练数据集合;其中,所述异常训练数据集合和非异常训练数据集合中,每组异常训练数据和非异常训练数据均包括一组特征曲线集合以及振动特征值;
14、所有异常训练数据和非异常训练数据组成振动异常训练数据;
15、其中,所述特征曲线集合包括一段振动波形曲线、一段速度变化曲线以及一段加速度变化曲线;所述振动特征值包括异常原因编号以及异常级别;异常训练数据中的振动特征值为对应的测试晶圆传送机械臂的异常原因的编号和异常级别,非异常训练数据的振动特征值的异常原因编号为0,异常级别为空;
16、且异常训练数据和非异常训练数据的特征曲线集合中各曲线的时长均为训练波形时长;
17、训练出识别异常类型的机器学习模型的方式包括:
18、将每组异常训练数据和非异常训练数据中的振动波形曲线分解成振动特征集合,所述振动特征集合中的每个元素分别代表根据该振动波形推算的物理特征量;
19、将每组振动特征集合作为机器学习模型的输入,所述机器学习模型以对每组振动特征集合的预测的异常原因编号为输出,以振动特征集合对应的异常训练数据或非异常训练数据的异常原因编号为预测目标,以最小化对所有异常原因编号的预测误差之和作为训练目标;对机器学习模型进行训练,直至预测误差之和达到收敛时停止训练,训练出根据振动特征集合输出预测的异常原因编号的机器学习模型;
20、为每个异常类型训练出判断异常级别的贝叶斯网络模型的方式为:
21、将所有异常训练数据按照异常原因编号进行分组,每组异常训练数据对应一个相同的异常原因编号,将划分后的每组异常训练数据表示为异常训练数据分组;
22、对于每组异常训练数据分组,训练贝叶斯网络模型;
23、具体的,训练贝叶斯网络模型的方式为:
24、将每组异常训练数据转化为贝叶斯输入特征数据;
25、构造贝叶斯网络模型的网络结构;
26、将异常训练数据分组中,每组异常训练数据对应的贝叶斯输入特征数据作为贝叶斯网络模型的输入,所述贝叶斯网络模型以对每组异常训练数据的预测的异常级别为输出,以异常训练数据中的异常级别作为预测目标,以最小化对所有异常级别的预测误差之和作为训练目标;对贝叶斯网络模型进行训练,直至预测误差之和达到收敛时停止训练,训练出根据贝叶斯输入特征数据输出预测的异常级别的贝叶斯网络模型;
27、将每组异常训练数据转化为贝叶斯输入特征数据的方式为:
28、将异常训练数据中的振动波形曲线分解成振动特征集合;
29、计算异常训练数据中速度变化曲线的平均值作为平均速度;
30、计算异常训练数据中加速度变化曲线的平均值作为平均加速度;
31、所述贝叶斯输入特征数据包括振动特征集合、平均速度以及平均加速度;
32、构造贝叶斯网络模型的网络结构的方式为:
33、构造三层贝叶斯网络模型结构;其中,第一层包括两个节点,第二层包括m个节点,第三层包括一个节点;其中,m为振动特征集合的元素数量;
34、第一层中的两个节点分别对应速度和加速度;
35、第二层中的m个节点分别对应振动特征集合中的每个元素,且第一层中每个节点均具有一条有向边指向第二层中的每个节点;
36、第三层中的一个节点对应异常训练数据中的异常级别,第二层中的每个节点均具有一条有向边指向第三层中的节点;
37、实时收集振动生产数据的方式为:
38、将真空生产环境中的晶圆传送机械臂表示为生产晶圆传送机械臂;
39、在生产晶圆传送机械臂上安装振动传感器、速度传感器以及加速度传感器,并每隔训练波形时长收集一段振动波形曲线、一段速度变化曲线以及一段加速度变化曲线作为一组振动生产数据;
40、使用机器学习模型输出判断的异常类型的方式为:
41、将振动生产数据中的振动波形曲线转化为对应的振动特征集合,并将该振动特征集合输入机器学习模型中,获得机器学习模型输出的判断的异常原因编号;基于异常原因编号,获得对应的异常类型;
42、使用判断的异常类型对应的贝叶斯网络模型输出判断的异常级别的方式为:
43、将振动生产数据转化为对应的贝叶斯输入特征数据,并将该贝叶斯输入特征数据输入至贝叶斯网络模型中,获得贝叶斯网络模型输出的判断的异常级别。
44、第二方面,本发明提出一种真空环境下晶圆传送机械臂异常监测系统,包括数据收集模块、模型训练模块以及真空监测模块;其中,各个模块之间电性连接;
45、数据收集模块,收集异常类型表,并基于异常类型表,在非真空测试环境收集振动异常训练数据,并将振动异常训练数据发送至模型训练模块;
46、模型训练模块,基于振动异常训练数据,训练出识别异常类型的机器学习模型,并为每个异常类型训练出判断异常级别的贝叶斯网络模型,并将机器学习模型和贝叶斯网络模型发送至真空监测模块;
47、真空监测模块,在真空生产环境中,收集振动生产数据;基于振动生产数据,使用机器学习模型输出判断的异常类型,以及基于振动生产数据,使用判断的异常类型对应的贝叶斯网络模型输出判断的异常级别。
48、第三方面,本发明提出一种电子设备,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;
49、所述处理器通过调用所述存储器中存储的计算机程序,执行上述的真空环境下晶圆传送机械臂异常监测方法。
50、第四方面,本发明提出一种计算机可读存储介质,其上存储有可擦写的计算机程序;
51、当所述计算机程序在计算机设备上运行时,使得所述计算机设备执行上述的真空环境下晶圆传送机械臂异常监测方法。
52、与现有技术相比,本发明的有益效果是:
53、本发明通过收集异常类型表,并基于异常类型表,在非真空测试环境收集振动异常训练数据,基于振动异常训练数据,训练出识别异常类型的机器学习模型,并为每个异常类型训练出判断异常级别的贝叶斯网络模型,在真空生产环境中,收集振动生产数据;基于振动生产数据,使用机器学习模型输出判断的异常类型,基于振动生产数据,使用判断的异常类型对应的贝叶斯网络模型输出判断的异常级别;通过晶圆传送机械臂的振动波形、速度和加速度的关系,解决了真空中无法传播声音,导致监测人员无法根据声音判断晶圆传送过程是否发生异常的问题。
- 还没有人留言评论。精彩留言会获得点赞!