一种挂轨式智能巡检机器人及其巡检方法与流程
本发明涉及智能巡检机器人领域,具体涉及一种挂轨式智能巡检机器人及其巡检方法。
背景技术:
1、目前数据中心的日常巡检多采用人工巡检,但人工周期性巡检方式的内容单一且重复性高,容易受到环境复杂度、巡检人员技术水平、经验、责任心甚至是其情绪等诸多因素的制约,从而导致巡检作业的质量层次不齐,也无法随时随地进行巡检和精细化采集巡检数据并及时进行智能化分析和处理。针对现阶段人工巡检方式存在的问题以及数据中心智能化运维需求,引入智能巡检机器人辅助甚至替代人工巡检,这一趋势已经成为业界共识。随着人工智能技术及机器人技术的日益发展,巡检机器人在各种领域中被广泛应用,以替代或辅助人工进行各种巡检工作。轨道式智能巡检机器人区别轮式机器人之处在于需要搭建独立的轨道平台,只能在固定轨道上运行,尤其是挂轨式机器人,其悬挂安装,不占用下方设备位置,然而目前的挂轨式只能巡检机器人只能驱动其自身在轨道上移动,当发现火灾时只能通知工作人员进入场地内灭火,无法携带灭火设备,且无法用作运输工具使用,应用场景受限,功能单一。
技术实现思路
1、本发明的目的就在于为了解决上述问题而提供一种挂轨式智能巡检机器人及其巡检方法,在牵引车架尾端的轨道上设置若干组无动力的挂车架,能够在需要运输物品或者向巡检系统增加设备时,通过主动轴和从动轴上的卡头锁入能够张开的锁定臂内侧,进而能够根据需要挂接多组挂车架,从而满足电器设备的组合巡检以及其他物品的运输使用,应用场景更加灵活,功能性更好;另外挂车架在未连接到牵引车架时能够通过复位簧顶推牵引环从而通过拉杆拉紧摆臂,进而利用摆臂端部的制动片保持挂车架在轨道上的制动刹停,确保挂车架在轨道上的位置稳定性;另外在挂车架与牵引车架自主对接后,能够通过卡头顶入两组锁定臂内,通过卡头顶推压盘带动复位簧压缩,进而推动两组拉杆带动摆臂向外转动,实现制动片与轨道的分离,以自动挂接到牵引车架上并解除制动,使用便捷;同时在需要解除分离多组挂车架时,通过调节电机带动主动轴、卡头以及多条从动轴转动,将多组连接挂车架的卡头旋转到能够从两组锁定臂之间抽出状态,此时复位簧顶推从动轴整体复位,卡头脱出锁定臂,完成多组挂车架的同步解锁,另外牵引环拽动拉杆和摆臂复位,摆臂端部制动片贴紧到轨道外侧,挂车架刹死停下保持制动状态,完成挂接分离过程,详见下文阐述。
2、为实现上述目的,本发明提供了以下技术方案:
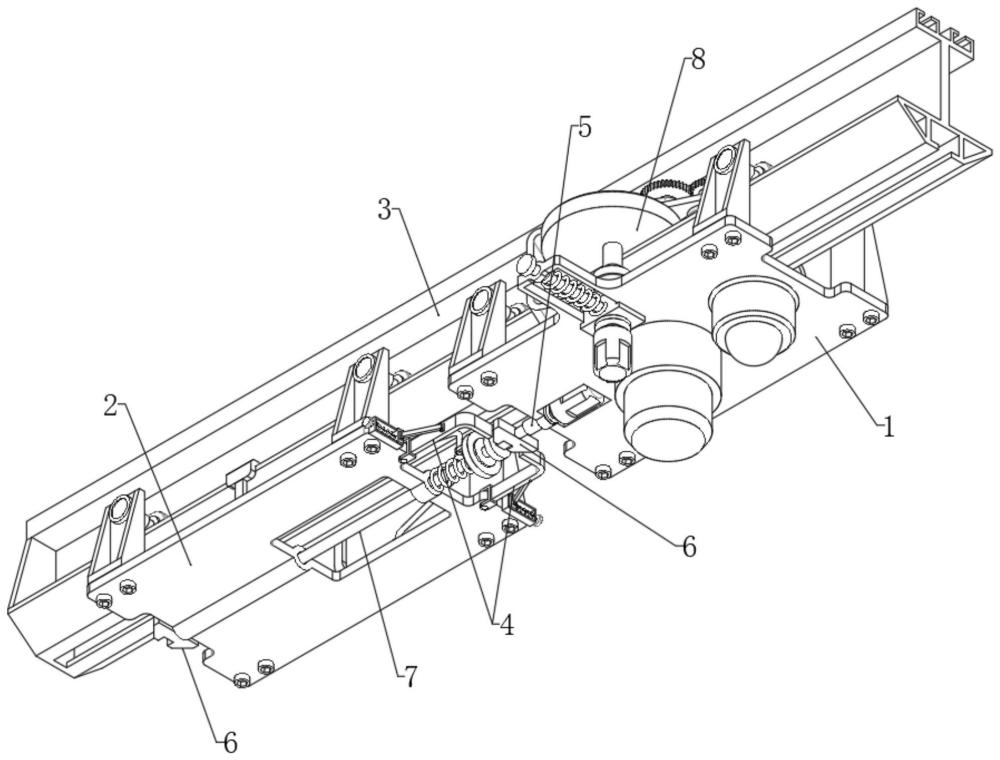
3、本发明提供的一种挂轨式智能巡检机器人,包括牵引车架、挂车架和轨道,所述牵引车架和所述挂车架横向并列设置于所述轨道下方,所述牵引车架靠近所述挂车架一侧设置有主动轴,所述挂车架中部横向穿出有从动轴,所述主动轴和所述从动轴外端部均固定有卡头,所述挂车架靠近所述牵引车架一侧前后对称设置有两组卡接锁定卡头的锁定组件,所述牵引车架和所述挂车架顶部四角均设置有沿所述轨道长度方向滑移的悬吊组件。
4、作为优选,所述卡头为梯形平板结构,其所述卡头外部竖向贯穿有矩形的卡槽,所述锁定组件包括铰接于所述挂车架外侧的转动座,该转动座外侧固定有l形的锁定臂,所述锁定臂外侧设置有固定于所述挂车架边沿的滑框,该滑框内部纵向滑动配合有滑块,所述滑块外侧与所述锁定臂之间铰接有支臂。
5、作为优选,所述滑框中部纵向贯穿有滑杆,所述滑杆与所述滑框螺纹配合,且所述滑杆外端部固定有旋钮,所述滑杆纵向贯穿所述滑块并与该滑块纵向滑动配合,所述滑杆外侧套设有顶紧所述滑块的弹簧,两组锁定臂外端部间距小于所述卡头纵向宽度。
6、作为优选,所述牵引车架靠近所述主动轴一侧竖向贯穿有电机坑,所述主动轴横向穿入所述电机坑内,且所述主动轴端部传动连接有固定于所述电机坑中的调节电机,所述挂车架中部竖向贯穿有容纳槽,所述从动轴靠近所述牵引车架一端固定有压盘,该压盘外端部靠下偏心处固定有能够卡接于所述卡槽内的卡块,所述压盘与所述挂车架之间的所述从动轴外侧固定有轴承座,该轴承座外侧转动连接有牵引环。
7、作为优选,所述容纳槽前后侧的所述挂车架顶侧均竖向固定有销轴,所述挂车架上方前后侧对称设置有两组摆臂,该摆臂端部固定有转动配合所述销轴的转动套,所述摆臂外端部向上延伸并固定有贴合到所述轨道外侧的制动片,两组摆臂中部相对侧均固定有转动耳,所述牵引环靠近所述摆臂一侧前后对称固定有两组辅助耳,所述转动耳与所述辅助耳之间铰接有拉杆,所述轴承座与所述挂车架之间的所述从动轴外侧套设有复位簧。
8、作为优选,所述牵引车架上方设置有动力组件,且所述牵引车架前侧设置有容纳动力组件纵向滑移的矩形框状的导向框,所述牵引车架底侧设置有监控模组。
9、作为优选,所述动力组件包括纵向滑动配合所述导向框的导向块,该导向块底侧固定有驱动电机,该驱动电机输出端传动连接有竖轴,所述竖轴向上延伸到所述导向块上方并固定有驱动轮,所述竖轴顶端固定有带轮,所述驱动轮后侧抵紧于所述轨道前侧,且所述导向块前部固定有纵向伸出导向框的撑杆,所述撑杆前端部固定有挡块,所述导向框内部的所述撑杆外侧套设有向后抵紧导向块的压簧。
10、作为优选,所述导向块顶侧固定有u形的安装架,所述安装架顶端延伸到所述轨道前侧,且所述安装架顶侧中部转动配合有分动轴,该分动轴外部设置有传动连接所述带轮的同步带,所述分动轴顶端固定有大齿轮,所述安装架顶端转动配合有清洁轴,所述清洁轴顶端固定有啮合所述大齿轮的小齿轮,所述清洁轴底端固定有抵紧到轨道外侧的刷盘。
11、作为优选,所述牵引车架后侧固定有保持架,该保持架顶部横向设置有两组竖向延伸的轮轴,所述轮轴顶端固定有抵紧到轨道后侧的保持轮,所述悬吊组件包括固定于所述牵引车架或所述挂车架顶部四角的吊架,所述吊架顶端纵向转动设置有纵轴,该纵轴端部固定有抵紧到轨道内侧的承托轮,所述轨道靠近所述挂车架一端前后侧均封闭固定有挡板。
12、所述挂轨式智能巡检机器人的巡检方法,包括以下步骤:
13、a、正常巡检过程中,牵引车架与挂车架分离,牵引车架上的驱动电机带动竖轴和驱动轮旋转,通过驱动轮贴合轨道以配合后侧保持架上的两组保持轮分别抵紧轨道前后侧,之后通过驱动轮旋转以支撑牵引车架整体沿轨道行走,在轨道拐弯位置,驱动轮和保持轮的间距产生变化,此时通过压簧保持导向块顶部驱动轮始终抵紧到轨道前侧,以利用导向块的前后滑移动作确保驱动轮能够前后移动,以确保牵引车架能够在轨道上行走,配合下方监控模组进行监控巡检;
14、b、当需要利用挂车架作为灭火器或者其他物料的运输部件时,通过牵引车架移动到靠近挂车架位置,在挂车架单独放置时,复位簧顶推轴承座以利用牵引环拉紧连杆,从而通过连杆保持两组摆臂向内侧的拉紧状态,从而确保制动片抵紧到轨道两侧,以确保该组挂车架在轨道上处于制动锁定状态,在牵引车架移动到靠近挂车架位置时,牵引车架上主动轴端部的卡块移动到抵紧到两组锁定臂端部相接位置,通过牵引车架向挂车架位置持续靠近,从而顶推卡头推动两组锁定臂向外转动开启,进而将牵引车架上的卡头卡入两组锁定臂之间,之后通过压缩状态的弹簧顶推滑块带动支臂和锁定臂复位,以利用两组锁定臂将主动轴上的卡块锁定,实现牵引车架对第一组挂车架的挂接;
15、c、在主动轴上的卡头锁入两组锁定臂之间过程中,卡头抵紧压盘带动从动轴横移,同时复位簧产生压缩,两组连杆在牵引环的顶推作用下支撑挂车架上的两组摆臂向外转动,从而在卡块连接锁定臂的同时实现两组摆臂的向外转动,以将摆臂顶部的制动片脱离轨道,实现该组挂车架在轨道上刹车状态的自动解除;
16、d、当牵引车架连接上第一组挂车架后,该组挂车架自动解除制动,通过牵引车架支撑挂接状态的第一组挂车架横移,利用挂车架上的卡头顶入第二次挂车架上的两组锁定臂中,实现第二组挂车架在第一组挂车架尾端的挂接,同时第二组挂车架的两组制动片同步脱离轨道,以上述步骤操作,以依次接上并带动若干组挂车架以牵引状态移动;
17、e、需要解除牵引车架上挂接的若干组挂车架时,将远离牵引车架的一组挂车架推移到抵紧轨道尾端的挡板位置,之后通过调节电机带动主动轴转动90°,利用主动轴端部的卡头支撑从动轴以及若干组从动轴同步旋转90°,此时卡头能够从两组锁定臂端部之间的空隙中脱离,进而在复位簧作用下推动若干组挂车架上锁定臂之间的卡头脱出,以实现若干组挂车架的解挂脱离动作,之后在压盘上偏心状态位置的卡块自重作用下,支撑压盘带动从动轴及其端部压头复位旋转,将挂车架上从动轴端部的卡头再次复位到水平状态,且多组从动轴在复位簧支撑下横向复位后,利用牵引环带动拉杆支撑摆臂转动,以将摆臂端部制动片再次抵紧到轨道外侧,将若干组分离后的挂车架再次脱开并刹停到轨道上,以等待下一次的挂接输送动作。
18、有益效果在于:本发明通过在牵引车架尾端的轨道上设置若干组无动力的挂车架,能够在需要运输物品或者向巡检系统增加设备时,通过主动轴和从动轴上的卡头锁入能够张开的锁定臂内侧,进而能够根据需要挂接多组挂车架,从而满足电器设备的组合巡检以及其他物品的运输使用,应用场景更加灵活,功能性更好;
19、另外挂车架在未连接到牵引车架时能够通过复位簧顶推牵引环从而通过拉杆拉紧摆臂,进而利用摆臂端部的制动片保持挂车架在轨道上的制动刹停,确保挂车架在轨道上的位置稳定性;
20、以及在挂车架与牵引车架自主对接后,能够通过卡头顶入两组锁定臂内,通过卡头顶推压盘带动复位簧压缩,进而推动两组拉杆带动摆臂向外转动,实现制动片与轨道的分离,以自动挂接到牵引车架上并解除制动,使用便捷;
21、同时在需要解除分离多组挂车架时,通过调节电机带动主动轴、卡头以及多条从动轴转动,将多组连接挂车架的卡头旋转到能够从两组锁定臂之间抽出状态,此时复位簧顶推从动轴整体复位,卡头脱出锁定臂,完成多组挂车架的同步解锁,另外牵引环拽动拉杆和摆臂复位,摆臂端部制动片贴紧到轨道外侧,挂车架刹死停下保持制动状态,完成挂接分离过程。
- 还没有人留言评论。精彩留言会获得点赞!