智能骨灰收纳机器人的制作方法
本发明涉及智能殡葬的,具体涉及一种智能骨灰收纳机器人。
背景技术:
1、逝者的遗体进行火化是比较普遍的方式,火化后骨灰会被集中收纳到骨灰盒中,以供其家人亲属祭奠。
2、利用台床将遗体送入火化机内,由火化机对遗体进行火化,火化后骨灰会散落在台床上,目前,对于台床上的骨灰收纳工作,通常都是采用人工手动捡取,利用长筷子、夹子以及撮子等工具将骨灰从台床上收纳到骨灰盒内,再收纳完骨灰后,还需要利用吸尘器和刷子等工具对台床进行清洗。这种收纳方式流程比较复杂,效率较低,并且高温、异味的环境还会对收纳工人的身体健康产生极大的影响。
技术实现思路
1、为解决上述问题,即人工手动收纳骨灰流程比较复杂,效率较低,还会对收纳工人的人体造成影响的问题,本发明提出了一种智能骨灰收纳机器人,其包括有
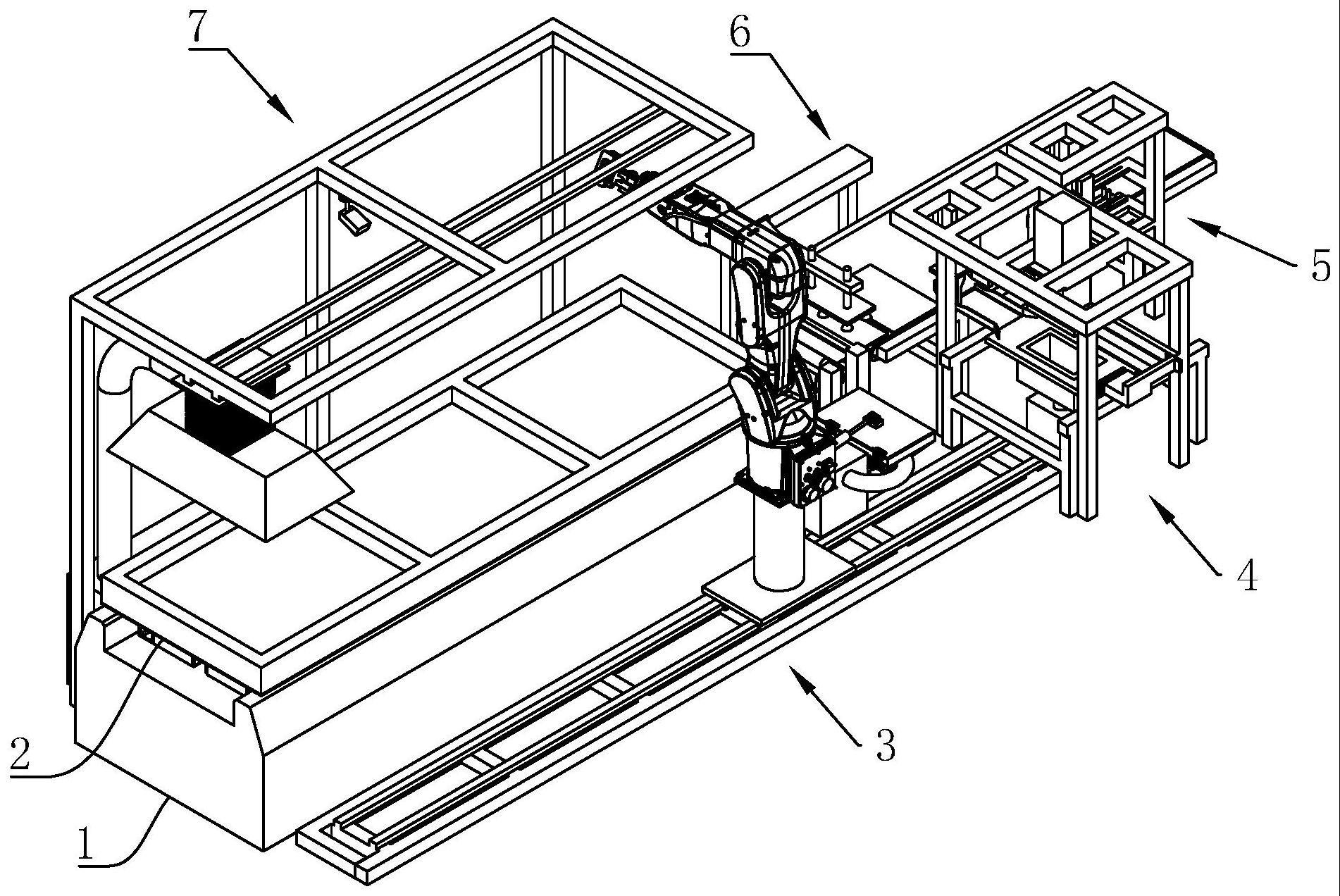
2、工作台,所述工作台上用于放置盛装骨灰的台床;
3、分拣机构,其设置在所述工作台的一侧,所述分拣机构上包括有用于捡取骨灰的机械手;
4、粉碎压块机构,其对应所述分拣机构设置,用于将所述机械手捡取的骨灰粉碎和压块;
5、上袋机构,其与所述粉碎压块机构的出口对应设置,以用于将收集袋运送到所述粉碎压块机构的出口处;
6、封袋机构,其设置在所述粉碎压块机构出口的下游,用于对所述收集袋密封。
7、本发明的进一步设置为:还包括有清理机构,所述清理机构设置在所述台床的上方,以用于对台床表面的清理。
8、本发明的进一步设置为:所述分拣机构包括有滑道,所述滑道平行于所述台床设置,所述滑道上滑动连接有底座,所述机械手安装在所述底座背离所述滑道的一端,所述机械手的工作端设置在所述台床的上方。
9、本发明的进一步设置为:所述底座的侧壁上还设置有收集斗,所述收集斗包括有上插板和下插板,所述上插板与所述下插板均通过液压装置驱动其开关。
10、本发明的进一步设置为:所述底座的侧壁上设置有风冷箱,所述风冷箱通过管道与所述收集斗连通,以用对所述收集斗内的骨灰进行降温。
11、本发明的进一步设置为:所述粉碎压块机构包括有支撑架,所述支撑架上设置有两端敞开设置的压缩筒,所述压缩筒对应所述分拣机构设置,所述支撑架上还设置有两块挤压板,两块所述挤压板分别设置在所述压缩筒的正上方和正下方,所述挤压板背离压缩筒的一侧表面上连接有液压装置,以用于驱动挤压板伸入到压缩筒内。
12、本发明的进一步设置为:所述支撑架上还设置有推板,所述推板对应所述粉碎压块机构的出口设置,所述推板设置在所述压缩筒的上方,所述推板背离出口的一侧表面连接有液压装置,以用于将推出所述压缩筒内的骨灰块推动向出口。
13、本发明的进一步设置为:所述支撑架上滑动连接有撑口装置,所述撑口装置设置在所述出口处;所述撑口装置的滑动方向垂直于所述上袋机构的运送方向设置。
14、本发明的进一步设置为:所述上袋机构包括有传送带,所述传送带的一侧设置有卷起所述收集袋的卷料支架,所述卷料支架与所述传送带之间还设置有封口机和切断机;所述传送带的一侧设置有滑台,所述滑台上滑动连接有吸盘爪,所述吸盘爪设置在所述传送带的上方,所述吸盘爪的滑动方向平行于所述传送带设置。
15、本发明的进一步设置为:所述封袋机构包括有安装架,所述安装架上安装有抽真空装置和吸盘爪,所述吸盘爪与所述安装架上下滑动连接,所述吸盘爪设置在所述传送带的上方,所述抽真空装置与所述传送带等高设置;所述安装架上还安装有密封压板和热封压板,所述密封压板和所述热封压板背离所述传送带的一侧表面上连接有用于驱动其移动的液压装置。
16、本发明的有益效果为:
17、1、通过分拣机构、粉碎压块机构、上袋机构以及封袋机构的配合,能够实现对骨灰的制动捡取、粉碎压块,真空包装等工作,代替了人工捡取,使骨灰捡取的工作操作更简单,效率更高,也避免了收纳工人身处到高温、异味的环境中。
18、2、通过设置清理机构,能够在捡取玩骨灰之后,进一步的对台床表面进行清理,有效的避免混灰,以及灰尘污染环境的问题。
19、3、通过封袋机构,能够实现对装有骨灰的收集袋进行抽真空处理,并进行密封,使骨灰能够处于真空状态,防止湿气以及雨水的浸渗造成骨灰发生变质,便于骨灰在室外环境下的长久保存。
20、
技术特征:
1.一种智能骨灰手按机器人,其特征在于:包括有:
2.根据权利要求1所述的智能骨灰收纳机器人,其特征在于:还包括有清理机构(7),所述清理机构(7)设置在所述台床(2)的上方,以用于对台床(2)表面的清理。
3.根据权利要求1所述的智能骨灰收纳机器人,其特征在于:所述分拣机构(3)包括有滑道(31),所述滑道(31)平行于所述台床(2)设置,所述滑道(31)上滑动连接有底座(32),所述机械手(33)安装在所述底座(32)背离所述滑道(31)的一端,所述机械手(33)的工作端设置在所述台床(2)的上方。
4.根据权利要求3所述的智能骨灰收纳机器人,其特征在于:所述底座(32)的侧壁上还设置有收集斗(321),所述收集斗(321)包括有上插板(3211)和下插板(3212),所述上插板(3211)与所述下插板(3212)均通过液压装置驱动其开关。
5.根据权利要求4所述的智能骨灰收纳机器人,其特征在于:所述底座(32)的侧壁上设置有风冷箱(322),所述风冷箱(322)通过管道与所述收集斗(321)连通,以用对所述收集斗(321)内的骨灰进行降温。
6.根据权利要求1所述的智能骨灰收纳机器人,其特征在于:所述粉碎压块机构(4)包括有支撑架(41),所述支撑架(41)上设置有两端敞开设置的压缩筒(42),所述压缩筒(42)对应所述分拣机构(3)设置,所述支撑架(41)上还设置有两块挤压板(43),两块所述挤压板(43)分别设置在所述压缩筒(42)的正上方和正下方,所述挤压板(43)背离压缩筒(42)的一侧表面上连接有液压装置,以用于驱动挤压板(43)伸入到压缩筒(42)内。
7.根据权利要求6所述的智能骨灰收纳机器人,其特征在于:所述支撑架(41)上还设置有推板(44),所述推板(44)对应所述粉碎压块机构(4)的出口设置,所述推板(44)设置在所述压缩筒(42)的上方,所述推板(44)背离出口的一侧表面连接有液压装置,以用于将推出所述压缩筒(42)内的骨灰块推动向出口。
8.根据权利要求7所述的智能骨灰收纳机器人,其特征在于:所述支撑架(41)上滑动连接有撑口装置(45),所述撑口装置(45)设置在所述出口处;所述撑口装置(45)的滑动方向垂直于所述上袋机构(6)的运送方向设置。
9.根据权利要求8所述的智能骨灰收纳机器人,其特征在于:所述上袋机构(6)包括有传送带(61),所述传送带(61)的一侧设置有卷起所述收集袋(9)的卷料支架(62),所述卷料支架(62)与所述传送带(61)之间还设置有封口机(64)和切断机(65);所述传送带(61)的一侧设置有滑台(63),所述滑台(63)上滑动连接有吸盘爪(8),所述吸盘爪(8)设置在所述传送带(61)的上方,所述吸盘爪(8)的滑动方向平行于所述传送带(61)设置。
10.根据权利要求9所述的智能骨灰收纳机器人,其特征在于:所述封袋机构(5)包括有安装架(51),所述安装架(51)上安装有抽真空装置(52)和吸盘爪(8),所述吸盘爪(8)与所述安装架(51)上下滑动连接,所述吸盘爪(8)设置在所述传送带(61)的上方,所述抽真空装置(52)与所述传送带(61)等高设置;所述安装架(51)上还安装有密封压板(54)和热封压板(53),所述密封压板(54)和所述热封压板(53)背离所述传送带(61)的一侧表面上连接有用于驱动其移动的液压装置。
技术总结
本发明公开了一种智能骨灰收纳机器人,涉及智能殡葬的技术领域,本发明旨在解决人工手动收纳骨灰流程比较复杂,效率较低,还会对收纳工人的人体造成影响的问题,本发明包括,工作台,所述工作台上用于放置盛装骨灰的台床;分拣机构,其设置在所述工作台的一侧,所述分拣机构包括有用于捡取骨灰的机械手;粉碎压块机构,其对应所述分拣机构设置,用于将所述机械手捡取的骨灰粉碎和压块;上袋机构,其与所述粉碎压块机构的出口对应设置,以用于将收集袋运送到所述粉碎压块机构的出口处;封袋机构,其设置在所述粉碎压块机构出口的下游,用于对所述收集袋密封。
技术研发人员:孟凡斗
受保护的技术使用者:沈阳顺天意机械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!