机器人及机器人的控制方法与流程
本发明涉及机器人及机器人的控制方法。
背景技术:
1、专利文献1记载的机器人具有基座、相对于基座进行旋转的臂、使臂旋转的电机、以及设置在基座与臂之间的减速器。减速器具有输入轴、输出轴以及齿轮系,通过齿轮系使输入轴的旋转速度减速,并由输出轴输出。在这样的减速器中,齿轮系的各齿轮间存在齿隙即所谓的游隙。
2、专利文献1:日本特开2005-177914号公报
3、但是,在专利文献1记载的机器人中,当想要停止机械臂的驱动时,即便是电机停止,机械臂也会稍微额外地旋转与齿隙导致的游隙相应的量。因此,存在导致机械臂的位置精度降低的问题。
技术实现思路
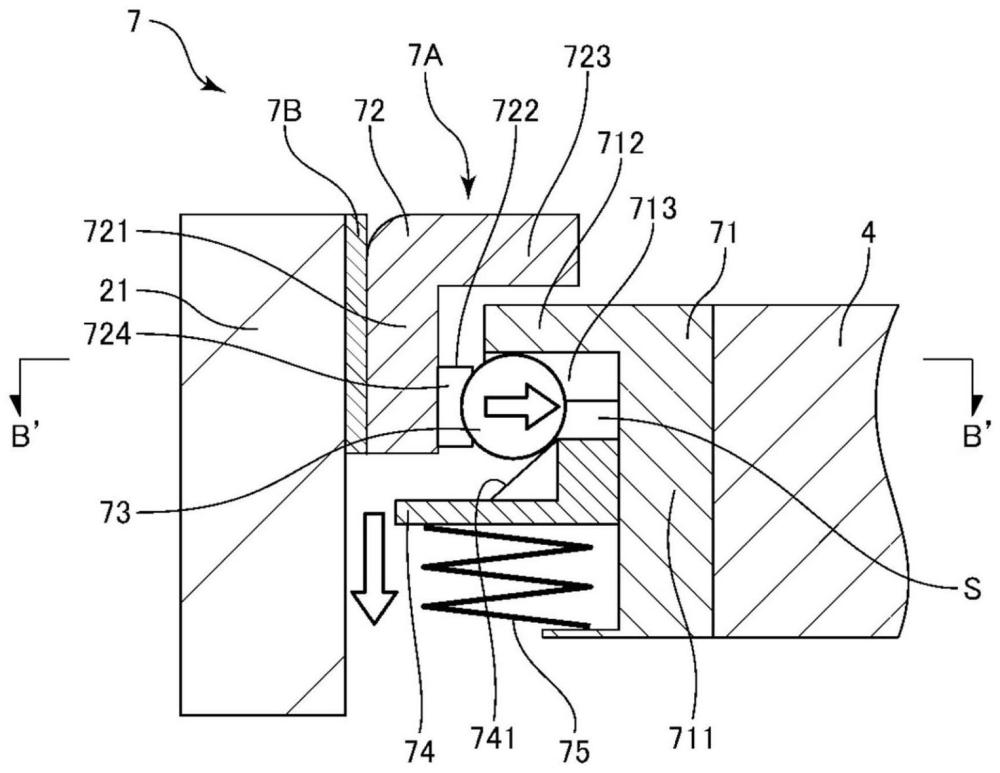
1、本发明的机器人的特征在于,具有:第一结构体;第二结构体,设置为能够相对于所述第一结构体进行相对旋转;驱动源,配置于所述第一结构体,驱动所述第二结构体相对于所述第一结构体进行相对旋转;减速器,具有输入轴、输出轴和齿轮部,所述输入轴连接于所述驱动源,所述输出轴连接于所述第二结构体,所述齿轮部设置在所述输入轴与所述输出轴之间,所述减速器使所述驱动源的旋转减速并传递至所述第二结构体;以及载荷赋予部,当所述输入轴的旋转速度为预定的值以下时,对所述输出轴施加载荷。
2、本发明的机器人的控制方法的特征在于,所述机器人具备:第一结构体;第二结构体,设置为能够相对于所述第一结构体进行相对旋转;驱动源,配置于所述第一结构体,驱动所述第二结构体相对于所述第一结构体进行相对旋转;以及减速器,具有输入轴、输出轴和齿轮部,所述输入轴连接于所述驱动源,所述输出轴连接于所述第二结构体,所述齿轮部设置在所述输入轴与所述输出轴之间,所述减速器使所述驱动源的旋转减速并传递至所述第二结构体,所述机器人的控制方法具有:第一步骤,获取与所述输入轴的旋转速度相关的信息;第二步骤,判断所述输入轴的旋转速度是否为预定的值以下;以及第三步骤,当所述输入轴的旋转速度为预定的值以下时,对所述输出轴施加载荷。
技术特征:
1.一种机器人,其特征在于,具有:
2.根据权利要求1所述的机器人,其特征在于,
3.根据权利要求1或2所述的机器人,其特征在于,
4.根据权利要求3所述的机器人,其特征在于,
5.根据权利要求1或2所述的机器人,其特征在于,所述机器人具有:
6.根据权利要求5所述的机器人,其特征在于,
7.一种机器人的控制方法,其特征在于,
技术总结
本发明提供动作中的位置精度高的机器人及机器人的控制方法。该机器人的特征在于,具有:第一结构体;第二结构体,设置为能够相对于所述第一结构体进行相对旋转;驱动源,配置于所述第一结构体,驱动所述第二结构体相对于所述第一结构体进行相对旋转;减速器,具有输入轴、输出轴和齿轮部,所述输入轴连接于所述驱动源,所述输出轴连接于所述第二结构体,所述齿轮部设置在所述输入轴与所述输出轴之间,所述减速器使所述驱动源的旋转减速并传递至所述第二结构体;以及载荷赋予部,当所述输入轴的旋转速度为预定的值以下时,对所述输出轴施加载荷。
技术研发人员:坂待淳基,年光俊介
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!