一种用于无人机的可伸缩垂钓式机械手的制作方法
本发明涉及机械手,尤其涉及一种用于无人机的可伸缩垂钓式机械手。
背景技术:
1、无人机装载机械手臂对楼顶分布式光伏板上的风筝、衣物等遮挡物进行清理,是提高光伏发电效率的有效维护保养手段。
2、目前大多数已有的机械手臂采用关节式设计,可参考申请号为cn2017202915292的专利,其包括夹爪、依次铰接的关节,以及用于驱动关节转动的驱动机构,这种机械手臂伸展和收缩需要依靠驱动机构驱动,即,在驱动机构没有驱动的时候,机械手臂基本不能收缩,当机械手臂向下撞击在光伏板上时,机械手臂对光伏板冲击力较大,容易对光伏板造成破坏。
技术实现思路
1、本发明为了解决现有的机械手臂容易破坏光伏板的缺点,提出一种用于无人机的可伸缩垂钓式机械手,当夹爪机构向下撞击到光伏板上时,不容易破坏光伏板。
2、为实现上述目的,本发明采用如下技术方案:
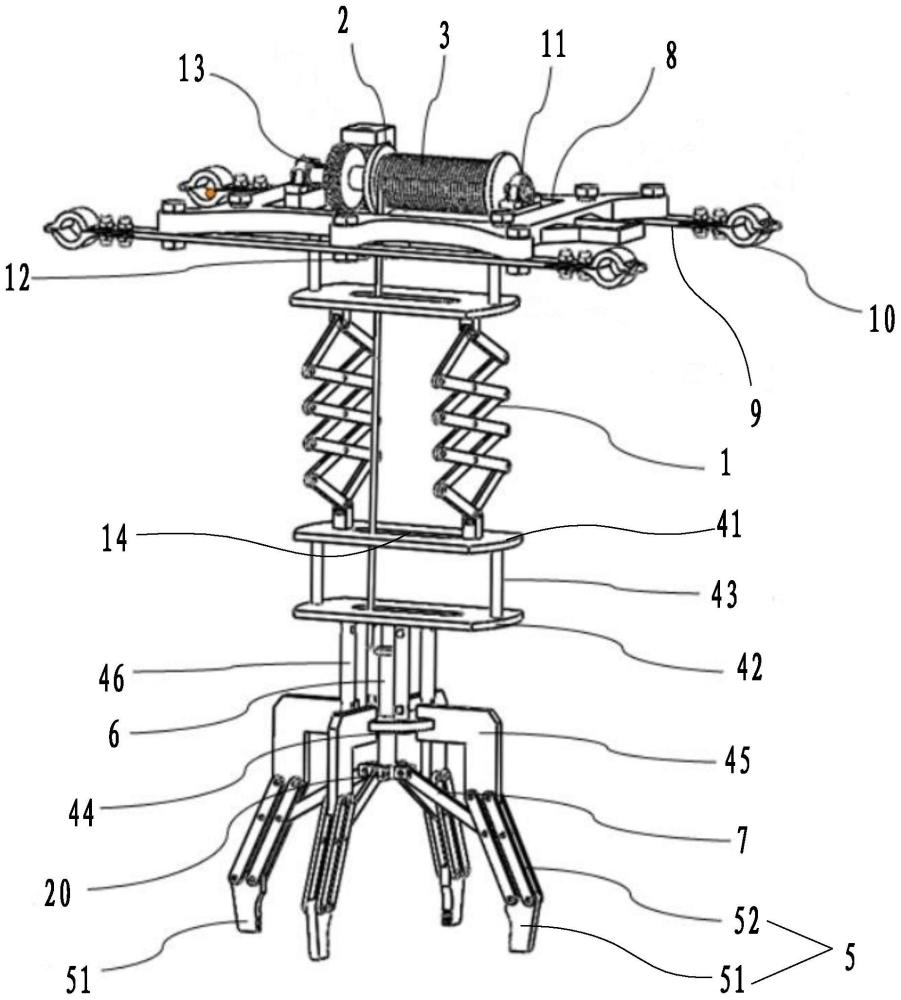
3、一种用于无人机的可伸缩垂钓式机械手,包括可安装在无人机下侧的支撑机构,以及设置在支撑机构上的驱动机构,支撑机构的下侧竖直连接有可自由伸缩的伸缩机构,伸缩机构的下端设置有夹爪机构;驱动机构包括和支撑机构转动连接的缠绕辊,以及可驱动缠绕辊的转动装置,缠绕辊上缠绕有绳索;夹爪机构包括和伸缩机构的下端连接的安装架,安装架的下侧沿外周设置有若干手爪部,手爪部的上端和安装架铰接,安装架中竖向穿过有导向轴,导向轴和安装架滑动连接,导向轴的上端和绳索连接,导向轴的下端沿周向铰接有若干传动杆,若干传动杆和若干手爪部一一对应,传动杆远离导向轴的一端铰接在手爪部的中部;导向轴可在重力作用下向下运动,以将手爪部打开;伸缩机构伸长至最长状态时,缠绕辊缠绕绳索,导向轴沿安装架向上运动,手爪部合拢。
4、通过上述设置,可通过缠绕辊收放绳索控制夹爪机构的升降和开合,结构更加简单;夹爪机构向下撞击在光伏板上时,伸缩机构可自由收缩,从而减小夹爪机构对光伏板的冲击力,防止光伏板损坏。
5、进一步的,支撑机构包括支撑座,驱动机构设置在支撑座上,伸缩机构的上端和支撑座连接,支撑座的下侧可拆卸连接有两根相互平行的支撑杆,支撑杆的两端设置有可与无人机连接的抱箍结构。
6、进一步的,支撑座的上侧设置有轴承座,缠绕辊的两端和轴承座转动连接。
7、通过上述设置,可减小缠绕辊转动的阻力。
8、进一步的,转动装置包括设置在支撑座上的电机,电机连接有蜗杆,缠绕辊的一端固定连接有和蜗杆配合的蜗轮。
9、通过上述设置,电机可通过蜗轮和蜗杆驱动缠绕辊转动,且当电机不运行时,蜗轮和蜗杆具有自锁效果,防止在夹爪机构意外下落。
10、进一步的,伸缩机构包括若干连接杆,连接杆相互交叉且相互铰接形成伸缩架结构,伸缩架结构的上端和支撑座铰接,伸缩架结构的下端和安装架铰接。
11、进一步的,连接杆的材质为尼龙,连接杆的质量为2.5至3.0g,伸缩机构1的长度范围为100mm至400mm。
12、通过上述设置,连接杆重量轻,小型无人机也能顺利带飞;强度高,伸缩机构不容易损坏;绝缘性好,增加作业的安全性。
13、进一步的,夹爪机构的材质为聚甲醛,夹爪机构的质量小于280g。
14、通过上述设置,使本申请的重量较小,小型无人机也能顺利带飞。
15、进一步的,手爪部包括夹持块,以及两根相互平行且长度相等的转动杆,转动杆的上端和安装架铰接,转动杆的下端铰接在夹持块上,传动杆远离导向轴的一端和其中一根转动杆的中部铰接。
16、通过上述设置,手爪部在开合的过程中,夹持块基本不会转动,便于夹持块夹持遮挡物。
17、进一步的,安装架包括上下设置的第一安装板和第二安装板,第一安装板通过第一连接柱和第二安装板固定连接,第一安装板和第二安装板上均设置有过孔,绳索穿过过孔,第二安装板的下侧设置有固定盘,导向轴竖向穿过固定盘的圆心并和固定盘滑动连接,沿固定盘的周向固定连接有若干侧板,侧板的上侧通过第二连接柱和第二安装板固定连接,转动杆的上端和侧板的下侧铰接。
18、进一步的,电机12设置为s9150舵机。
技术特征:
1.一种用于无人机的可伸缩垂钓式机械手,其特征在于,包括可安装在无人机下侧的支撑机构,以及设置在所述支撑机构上的驱动机构,所述支撑机构的下侧竖直连接有可自由伸缩的伸缩机构,所述伸缩机构的下端设置有夹爪机构;
2.根据权利要求1所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述支撑机构包括支撑座,所述驱动机构设置在所述支撑座上,所述伸缩机构的上端和所述支撑座连接,所述支撑座的下侧可拆卸连接有两根相互平行的支撑杆,所述支撑杆的两端设置有可与无人机连接的抱箍结构。
3.根据权利要求2所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述支撑座的上侧设置有轴承座,所述缠绕辊的两端和所述轴承座转动连接。
4.根据权利要求2所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述转动装置包括设置在所述支撑座上的电机,所述电机连接有蜗杆,所述缠绕辊的一端固定连接有和所述蜗杆配合的蜗轮。
5.根据权利要求4所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述电机设置为s9150舵机。
6.根据权利要求2所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述伸缩机构包括若干连接杆,所述连接杆相互交叉且相互铰接形成伸缩架结构,所述伸缩架结构的上端和所述支撑座铰接,所述伸缩架结构的下端和所述安装架铰接。
7.根据权利要求6所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述连接杆的材质为尼龙,所述连接杆的质量为2.5至3.0g,所述伸缩机构的长度范围为100mm至400mm。
8.根据权利要求1所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述夹爪机构的材质为聚甲醛,所述夹爪机构的质量小于280g。
9.根据权利要求8所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述手爪部包括夹持块,以及两根相互平行且长度相等的转动杆,所述转动杆的上端和所述安装架铰接,所述转动杆的下端铰接在所述夹持块上,所述传动杆远离所述导向轴的一端和其中一根所述转动杆的中部铰接。
10.根据权利要求9所述的一种用于无人机的可伸缩垂钓式机械手,其特征在于,所述安装架包括上下设置的第一安装板和第二安装板,所述第一安装板通过第一连接柱和所述第二安装板固定连接,所述第一安装板和所述第二安装板上均设置有过孔,所述绳索穿过所述过孔,所述第二安装板的下侧设置有固定盘,所述导向轴竖向穿过所述固定盘的圆心并和所述固定盘滑动连接,沿所述固定盘的周向固定连接有若干侧板,所述侧板的上侧通过第二连接柱和所述第二安装板固定连接,所述转动杆的上端和所述侧板的下侧铰接。
技术总结
本发明公开了一种用于无人机的可伸缩垂钓式机械手,包括可安装在无人机下侧的支撑机构,以及设置在支撑机构上的驱动机构,支撑机构的下侧竖直连接有可自由伸缩的伸缩机构,伸缩机构的下端设置有夹爪机构;驱动机构包括和支撑机构转动连接的缠绕辊,以及可驱动缠绕辊的转动装置,缠绕辊上缠绕有绳索;夹爪机构包括和伸缩机构的下端连接的安装架,安装架的下侧沿外周设置有若干手爪部,手爪部的上端和安装架铰接,安装架中竖向穿过有导向轴,导向轴和安装架滑动连接,导向轴的下端沿周向铰接有若干传动杆;本发明提出一种用于无人机的可伸缩垂钓式机械手,当夹爪机构向下撞击到光伏板上时,不容易破坏光伏板。
技术研发人员:胡锡幸,黄迪,苏芳,严性平,朱超越,陈潘霞,赵欢伟
受保护的技术使用者:浙江大有实业有限公司杭州科技发展分公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!