具有夹块的机械手及设备的制作方法
本公开内容涉及半导体制造领域,并且更具体而言涉及一种用于传输晶圆的机械手以及半导体处理设备。
背景技术:
1、在现有技术之中,为了抓取晶圆中的脏片和净片,通常需要设计不同的机械手。例如,一个机械手用于抓取脏片,然后进行清洗。而另一个机械手则用于将干净的晶圆重新抓取并放置至期望的位置。
2、而两个独立设置的机械手虽然可以预防脏片对于净片的污染,但是这样的机械手的结构复杂,而且不利于高效处理。
技术实现思路
1、本公开内容的目的旨在解决现有技术中存在的上述问题和缺陷中的至少一方面,即至少能够提高半导体处理设备的传输效率并且精减机械手的数量。针对该技术问题,本公开内容基于如何复用机械手来提出一种新型的用于传输晶圆的机械手。
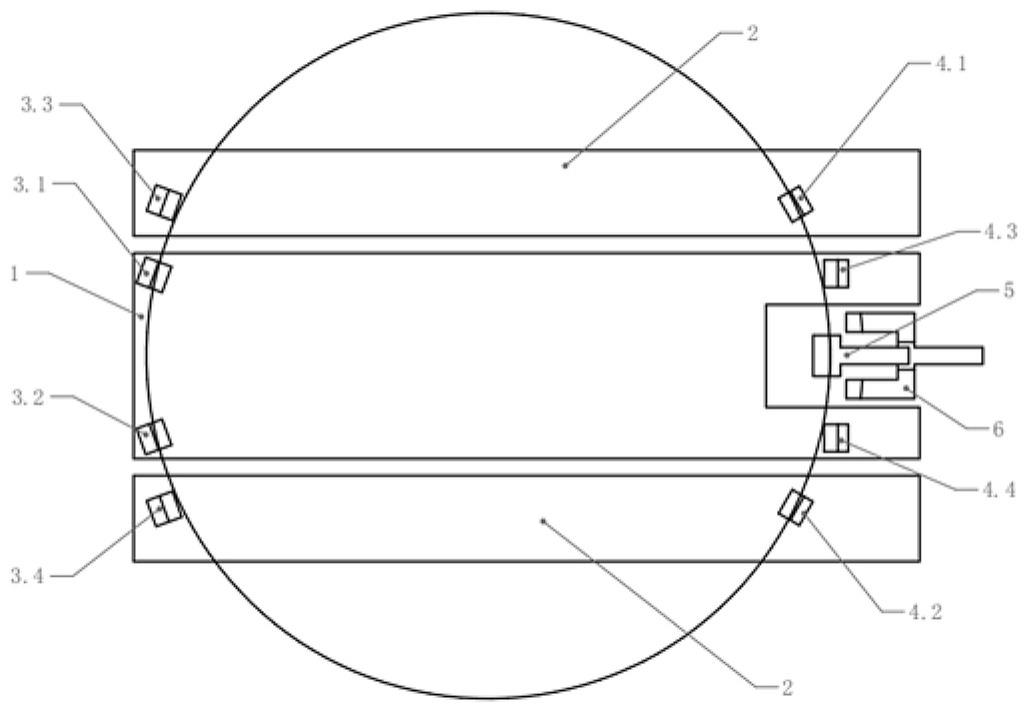
2、具体而言,本公开内容提出了一种用于传输晶圆的机械手,所述机械手包括:
3、第一手指,所述第一手指的第一端上设置有第一挡块、第二挡块,并且在与所述第一端相对的第二端上设置有第一垫块和第二垫块;
4、至少两个第二手指,所述至少两个第二手指被设置在所述第一手指的两侧,所述至少两个第二手指分别包括设置在所述第一端的第三挡块和第四挡块,以及设置在所述第二端的第三垫块和第四垫块;以及
5、至少一个夹块,所述至少一个夹块被设置在所述第一手指的所述第二端处并且能够相对于所述第一手指移动。
6、以这样的方式,依据本公开内容的机械手能够借助于不同的挡块以及垫块的配合以及夹块的作用,利用第一手指和第二手指上设置的不同的部件来实现对于脏片和净片的抓取,其采用机械手上不同的部分,所以能够在复用同一个机械手的情况下采用不同的部件来接触脏片和净片,由此能够避免脏片对于净片的污染,此外依据本公开内容的机械手由于实现了复用,从而精减了机械手的数量。此外,由于机械手的数量减少了,从而能够节约工艺腔空间、减少机械设备成本、或者减少高精密机械臂使用。
7、在根据本公开内容的一个示例性的实施例之中,所述第一挡块和所述第二挡块、所述第一垫块和所述第二垫块、所述第三挡块和所述第四挡块、以及所述第三垫块和所述第四垫块关于所述第一手指的纵向轴线轴对称。以这样的方式能够使得依据本公开内容的机械手更稳固地抓取晶圆。
8、在根据本公开内容的一个示例性的实施例之中,所述至少一个夹块关于所述第一手指的纵向轴线轴对称。以这样的方式能够使得夹块的夹持对于晶圆来说是受力均匀的,从而不会造成对于晶圆的破坏。
9、在根据本公开内容的一个示例性的实施例之中,所述机械手还包括:
10、第一驱动装置,所述第一驱动装置被设置用于将所述第一手指相对于所述第二手指移动,以在第一相对位置和第二相对位置之间切换,其中, 在所述第一相对位置处,所述第一挡块、所述第二挡块、所述第三垫块以及所述第四垫块位于同一个圆周上,并且其中,在所述第二相对位置处,所述第三挡块、所述第四挡块、所述第一垫块以及所述第二垫块位于同一个圆周上。
11、以这样的方式实现对于第一手指和第二手指的相对位置的调节。
12、在根据本公开内容的一个示例性的实施例之中,所述机械手还包括:
13、第二驱动装置,所述第二驱动装置被设置用于将所述至少一个夹块相对于所述第一手指移动。
14、借助于依据本公开内容的第二驱动装置,依据本公开内容的夹块能够很好地夹持待抓取的晶圆,从而使得抓取更为稳固。
15、优选地,在根据本公开内容的一个示例性的实施例之中,所述至少一个夹块相对于所述第一手指的移动方向朝向所述圆周中心。以这样的方式使得夹持时的晶圆受力更为均匀,从而提高晶圆的质量稳定性。
16、优选地,在根据本公开内容的一个示例性的实施例之中,在所述第一相对位置处,所述第一挡块、所述第二挡块、所述第三垫块以及所述第四垫块所位于的圆周在第一高度上,并且其中,在所述第二相对位置处,所述第三挡块、所述第四挡块、所述第一垫块以及所述第二垫块所位于的圆周在第二高度上。
17、更为优选地,在根据本公开内容的一个示例性的实施例之中,所述第一高度和所述第二高度相同,所述机械手包括第一夹块和第二夹块,其中,所述第一夹块用于在第一高度上夹紧晶圆,并且其中,所述第二夹块用于在第二高度上夹紧晶圆。
18、在根据本公开内容的一个示例性的实施例之中,所述第一高度和所述第二高度不同,所述机械手所包括的夹块具有两个凸台,其中,第一个凸台用于在第一高度上夹紧晶圆,并且其中,所述第二个凸台用于在第二高度上夹紧晶圆。
19、此外,依据本公开内容的第二方面提出了一种半导体处理设备,所述半导体处理设备包括依据本公开内容的第一方面所提出的机械手。
20、在根据本公开内容的一个示例性的实施例之中,所述半导体处理设备包括至少两个机械手,所述至少两个机械手处于不同的层中。
21、综上所述,在依据本公开内容的机械手之中,依据本公开内容的机械手能够借助于不同的挡块以及垫块的配合以及夹块的作用,利用第一手指和第二手指上设置的不同的部件来实现对于脏片和净片的抓取,其采用机械手上不同的部分,所以能够在复用同一个机械手的情况下采用不同的部件来接触脏片和净片,由此能够避免脏片对于净片的污染,此外依据本公开内容的机械手由于实现了复用,从而精减了机械手的数量。此外,由于机械手的数量减少了,从而能够节约工艺腔空间、减少机械设备成本、或者减少高精密机械臂使用。
技术特征:
1.一种用于传输晶圆的机械手,其特征在于,所述机械手包括:
2.根据权利要求1所述的机械手,其特征在于,所述第一挡块和所述第二挡块、所述第一垫块和所述第二垫块、所述第三挡块和所述第四挡块、以及所述第三垫块和所述第四垫块关于所述第一手指的纵向轴线轴对称。
3.根据权利要求1或2所述的机械手,其特征在于,所述至少一个夹块关于所述第一手指的纵向轴线轴对称。
4.根据权利要求1所述的机械手,其特征在于, 所述机械手还包括:
5.根据权利要求1或4所述的机械手,其特征在于,所述至少一个夹块相对于所述第一手指的移动方向朝向所述圆周中心。
6.根据权利要求1所述的机械手,其特征在于,在所述第一相对位置处,所述第一挡块、所述第二挡块、所述第三垫块以及所述第四垫块所位于的圆周在第一高度上,并且其中,在所述第二相对位置处,所述第三挡块、所述第四挡块、所述第一垫块以及所述第二垫块所位于的圆周在第二高度上。
7.根据权利要求6所述的机械手,其特征在于,所述第一高度和所述第二高度相同,所述机械手包括第一夹块和第二夹块,其中,所述第一夹块用于在第一高度上夹紧晶圆,并且其中,所述第二夹块用于在第二高度上夹紧晶圆。
8.根据权利要求6所述的机械手,其特征在于,所述第一高度和所述第二高度不同,所述机械手所包括的夹块具有两个凸台,其中,第一个凸台用于在第一高度上夹紧晶圆,并且其中,所述第二个凸台用于在第二高度上夹紧晶圆。
9.一种半导体处理设备,其特征在于,所述半导体处理设备包括至少一个根据权利要求1至8中任一项所述的机械手。
10.根据权利要求9所述的半导体处理设备,其特征在于,所述半导体处理设备包括至少两个机械手,所述至少两个机械手处于不同的层中。
技术总结
本公开内容公开了一种具有夹块的机械手及设备,所述机械手包括:第一手指,所述第一手指的第一端上设置有第一挡块、第二挡块,并且在与所述第一端相对的第二端上设置有第一垫块和第二垫块;至少两个第二手指,所述至少两个第二手指被设置在所述第一手指的两侧,所述至少两个第二手指分别包括设置在所述第一端的第三挡块和第四挡块,以及设置在所述第二端的第三垫块和第四垫块;以及至少一个夹块,所述至少一个夹块被设置在所述第一手指的所述第二端处并且能够相对于所述第一手指移动。
技术研发人员:张渊博,金浩,黄允文
受保护的技术使用者:上海普达特半导体设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!