一种重载机器人运动规划方法
本发明涉及一种机械臂运动规划方法,特别是涉及一种重载机器人运动规划方法,属于机械臂运动规划方法。
背景技术:
1、机械臂运动学是工业机器人研究领域的一个重要方向,是研究机械臂运动控制和路径规划的基础,通过机械臂运动学的研究,可以确定机械臂在空间中的位置和姿态,以及其每一个关节的角度或位置,为后续的路径规划、动力学分析和控制设计提供数据基础,因此,机械臂运动学分析对于机械臂在执行各种工作任务中的运动控制精度、速度和稳定性都起到至关重要的作用。
2、目前,机械臂运动学研究已经非常成熟,国内外研究学者也开发出多种求解算法和计算步骤,其中运动学分析包括了运动学正解问题和逆解问题,运动学正解问题是根据关节在空间坐标系上的位置及其设定速度推导出机械臂末端执行器的位姿和速度,在研究构建正运动学模型的方法主要有d-h参数法和旋量法,其中d-h参数法由于其通过采用齐次坐标变换矩阵的形式,使用4个参数将机器人的位置和姿态在矩阵中统一描述,思路灵活清晰,适应于各种类型的机器人,在运动学正解问题的研究中受到国内外学者的广泛应用。
3、在机械臂逆运动学分析的方法中,有解析法、迭代法和几何法等多种方法,其中解析法是一种直接求解方程的方法,以此得到解析表达式,但是使用解析法要求机械臂必须具有规则的结构和较简单的工作空间形态才能够有效使用,而且解析解种类往往比较有限,在遇到错综复杂的机械结构或者偏离设计范围的情况下,不能满足实际应用需求,为了克服解析法存在的缺陷,研究者们还提出了迭代法和几何法,迭代法采用数值计算进行逐步求解,不需要知道解析表达式,因此更加泛用性强,它适合求解复杂非线性问题,比如遇到机械臂出现奇异点时,也可以通过调整迭代次数等参数进行优化求解,然而,无论采用哪种方法,机械臂逆运动学求解面临存在性与非唯一性的问题,其问题的分析与研究也远比运动学正解问题更加复杂,为此设计一种重载机器人运动规划方法来解决上述问题。
技术实现思路
1、本发明的主要目的是为了提供一种重载机器人运动规划方法。
2、本发明的目的可以通过采用如下技术方案达到:
3、一种重载机器人运动规划方法,包括如下步骤:
4、步骤一:采用standard d-h参数法构建机械臂的关节连杆坐标系;
5、步骤二:依据步骤一构建的关节连杆坐标系建立机械臂正运动学模型;
6、步骤三:依据步骤二机械臂正运动学模型建立机械臂逆运动学模型;
7、步骤四:对六轴重型机械臂的腕部奇异点、肩部奇异点和肘部奇异点进行分析;
8、步骤五:对六轴重型机械臂进行运动学仿真与验证。
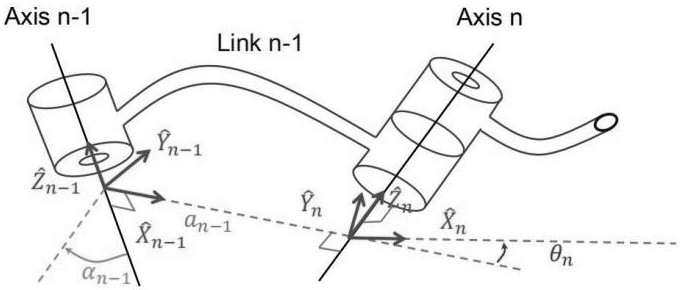
9、优选的,在步骤一中关节连杆坐标系zi轴与i关节的旋转中心轴线重合,且方向沿着其轴线方向;
10、xi轴与沿着相邻的zi轴与zi-1轴之间的公垂线重合;
11、yi轴与xi轴和zi轴垂直并遵循右手定则;
12、连杆转角θi为从zi-1轴的方向看xi-1轴与xi轴之间的夹角;
13、连杆距离di为沿zi-1轴的方向,xi-1轴与xi轴之间的距离为两杆件之间的距离;
14、连杆偏距ai为沿xi轴的方向,zi-1轴到zi轴之间的距离为两关节轴线之间的距离;
15、连杆转角αi为从xi轴的方向看,zi-1轴到zi轴之间的夹角。
16、优选的,步骤二中建立机械臂正运动学模型是将standard d-h参数法构建的关节连杆坐标系拆分成多个变换过程,具体包括如下步骤:
17、s11:绕zi-1轴旋转θi使xi-1轴和xi轴之间互相平行;
18、s12:沿zi-1轴平移di使xi-1轴与xi轴共线;
19、s13:沿xi轴平移ai使xi-1轴与xi轴原点重合;
20、s14:绕xi轴旋转αi使zi-1轴到zi轴对齐,从而完成变换。
21、优选的,步骤三中的机械臂逆运动学模型是通过机械臂正运动学模型得到的机械臂末端执行器的位姿矩阵计算出机械臂各关节的旋转角度。
22、优选的,通过使用matlab基础代码来编写机械臂正运动学模型计算流程,并给定机械臂特定关节角度进行实例计算,将运行后的结果与实际结果进行对比,来验证构建的机械臂正运动学模型矩阵t06的准确性。
23、优选的,在步骤五中对六轴重型机械臂进行运动学验证,验证构建的机械臂正运动学模型矩阵t06的准确性具体包括如下步骤:
24、s21:设定各关节转动初始角度;
25、s22:代入正运动学模型求解机械臂末端位姿矩阵,采用matlab算法求解机械臂末端位姿矩阵;
26、s23:将s22中采用正运动学模型求解机械臂末端位姿矩阵与采用matlab算法求解机械臂末端位姿矩阵结合进行比较判断是否相等;
27、s24:相等则正运动学模型正确,不相等则正运动学模型错误。
28、优选的,通过matlab的robotics toolbos插件对该机械臂进行计算和仿真具体包括如下步骤:
29、s31:通过toolbox插件中的link()和serialink()函数调用构建机械臂连杆关系,即该机械臂的d-h参数;
30、l(1)=link('d',705,'a',400,'alpha',pi/2,'standard');
31、l(2)=link('d',0,'a',1100,'alpha',0,'offset',pi/2,'standard');
32、l(3)=link('d',0,'a',243,'alpha',pi/2,'standard');
33、l(4)=link('d',1104.42,'a',0,'alpha',-pi/2,'standard');
34、l(5)=link('d',0,'a',0,'alpha',pi/2,'standard');
35、l(6)=link('d',217,'a',0,'alpha',0,'standard');
36、robot=seriallink(l,'name','six-axis-heavydutyrobot','manufacturer','xianxuanjian');
37、s32:根据s31中机械臂设计参数设定各关节角的转动范围;
38、l(1).qlim=[-180,180]/180*pi;
39、l(2).qlim=[-53,78]/180*pi;
40、l(3).qlim=[-193,78]/180*pi;
41、l(4).qlim=[-360,360]/180*pi;
42、l(5).qlim=[-123,123]/180*pi;
43、l(6).qlim=[-360,360]/180*pi;
44、s33:设定各关节转动初始角度为0°,并转换为弧度制,通过机器人工具箱中的fkine函数进行机械臂的正运动学求解;
45、theta=[0 0 0 0 0 0];
46、theta=theta/180*pi;
47、t=robot.fkine(theta);
48、s34:当设定各关节转动初始角度分别为0、30、0、0、0、0时,有theta=[0 30 0 0 00];
49、theta=theta/180*pi;
50、t=robot.fkine(theta);
51、s35:将程序计算结果与构建的正运动学模型的结果对比分析,发现结果一致,证明机械臂正运动学建模成立。
52、优选的,在步骤五中对六轴重型机械臂进行运动学仿真,具体是根据蒙特卡洛法在构建好的机械臂连杆模型的基础上,通过rand()函数设置10000个随机关节角度进行末端位姿求解,对机械臂末端工作空间进行绘制,步骤如下:
53、s41:设置n个随机数;
54、s42:使每个关节在其运动范围内产生n个分布均匀的随机数,并将其组合n个关节向量;
55、s43:随机选取一组关节向量;
56、s44:根据正运动学求解关节向量对应机械臂的末端位姿点;
57、s45:判断是否达到边界,当为否的时候则进行s42至s45的重复操作,当为是的时候则绘制工作空间。
58、本发明的有益技术效果:
59、本发明提供的一种重载机器人运动规划方法,采用standard d-h参数法构建机械臂的关节连杆坐标系,依据步骤一构建的关节连杆坐标系建立机械臂正运动学模型,依据步骤二机械臂正运动学模型建立机械臂逆运动学模型,对六轴重型机械臂的腕部奇异点、肩部奇异点和肘部奇异点进行分析,对六轴重型机械臂进行运动学仿真与验证,解决了机械臂逆运动学求解面临存在性与非唯一性的问题。
- 还没有人留言评论。精彩留言会获得点赞!