一种基于视觉识别的人形机器人及其工作方法与流程
本发明涉及人形机器人,尤其是一种基于视觉识别的人形机器人及其工作方法。
背景技术:
1、人形机器人是一种模仿人形制作的机器人,包括模仿人的头、手、脚和身体。它们可以像人一样行走、做动作、说话等。人形机器人的研制和应用在工业、医疗、服务等领域都有着广泛的前景和潜力。
2、中国专利公开号为cn211491553u,公开了一种人形机器人,包括肩部,所述肩部上端连接有头部,所述肩部y轴方向左右两端连接有手臂部,所述肩部下端连接有脊柱部,所述脊柱部下端连接有胯部,所述胯部两端连接有腿部,所述头部通过连接组件完成相对于肩部,以z轴为转动轴的转动;所述手臂部上端通过连接组件完成相对于肩部,以x轴为转动轴的转动;所述胯部通过连接组件完成相对于脊柱部,分别以x轴和y轴为转动轴的转动;所述腿部上端通过连接组件完成相对于胯部,以x轴为转动轴的转动。本实用新型提供一种人形机器人,通过仿生工艺制造出主要的连接骨架,并通过转轴电机作为各个关节的连接为,控制机器人完成仿人类运动路线轨迹,从而在此基础上进行更好的延伸开发。
3、上述中的现有技术方案存在以下缺陷:其可以保持机器人的正常运动的,但人形机器人为了进行运动需要安装摄像头采集图像,但摄像头使用中,太阳的强光或是激光产生的高能光束可能会对摄像头中的感光元件造成热量积累,并导致元件失效或烧毁,所以我们提出了一种基于视觉识别的人形机器人及其工作方法,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的在于提供一种基于视觉识别的人形机器人及其工作方法,以解决上述背景技术中提出人形机器人为了进行运动需要安装摄像头采集图像,但摄像头使用中,太阳的强光或是激光产生的高能光束可能会对摄像头中的感光元件造成热量积累,并导致元件失效或烧毁的问题。
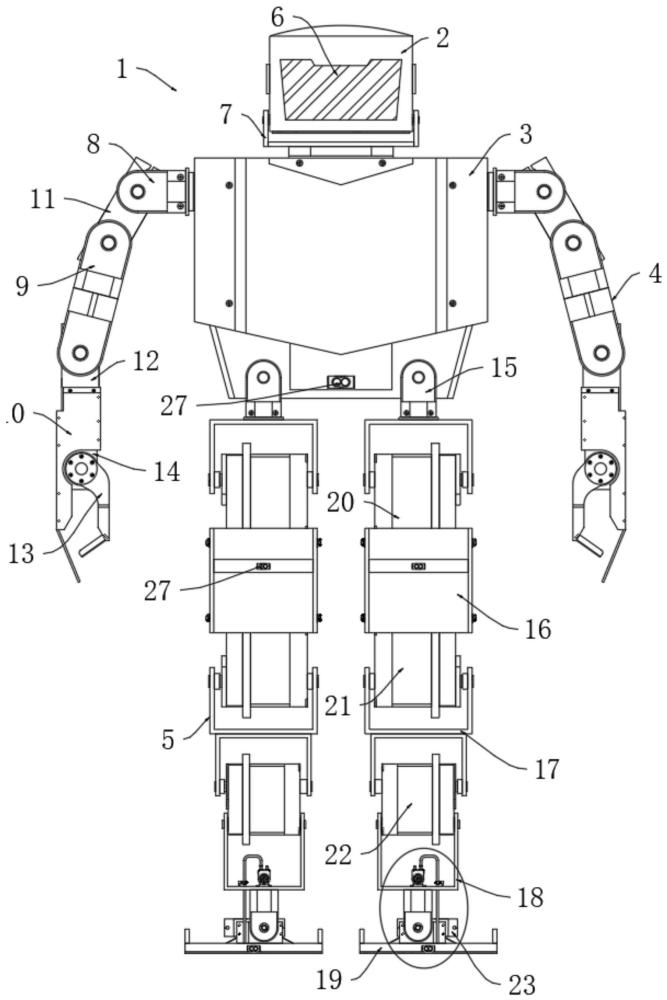
2、为实现上述目的,本发明提供如下技术方案:一种基于视觉识别的人形机器人,包括人形机器人本体、机器人控制系统和机器人运算系统,所述人形机器人本体的中间位置处设置有躯干区域,所述躯干区域的上方设置有头部区域,所述躯干区域的两侧对称设置有手臂区域,所述躯干区域的下方对称设置有腿部区域,所述头部区域的中间位置处设置有摄像模块固定板,所述摄像模块固定板前端的上方分别设置有红外测距传感器、摄像模块、红外摄像模块和激光雷达传感器,所述头部区域前端的中间位置处设置有摄像防护玻璃,所述摄像防护玻璃的上方设置有滤光膜卷筒,所述滤光膜卷筒的内部卷收有滤光膜,所述滤光膜位于摄像防护玻璃的一侧,所述滤光膜的下端位于红外测距传感器、摄像模块、红外摄像模块和激光雷达传感器的前侧。
3、优选的,所述摄像防护玻璃的两侧对称设置有滤光膜驱动丝杆,所述滤光膜驱动丝杆上传动设置有滤光膜滑块,所述滤光膜滑块的后端与滤光膜下端固定连接,所述滤光膜,所述红外测距传感器位于摄像模块的一侧,所述摄像模块位于红外摄像模块的一侧,所述红外摄像模块的一侧、躯干区域下端的前侧、腿部第二固定座中心的前侧以及脚部支撑座中心的前侧分别设置有激光雷达传感器。
4、优选的,所述头部区域的下端设置有头部驱动座,所述头部区域内部的一侧固定设置有第二头部转动电机,所述第二头部转动电机与头部驱动座传动连接,所述躯干区域内部的上端固定设置有第一头部转动电机,所述第一头部转动电机的输出端与头部驱动座下端的中间位置处传动连接。
5、优选的,所述手臂区域的上端设置有手臂第一固定座,所述手臂区域的中间位置处设置有手臂第二固定座,所述手臂区域的下端设置有抓取手,所述手臂第一固定座与手臂第二固定座之间设置有手臂第一数字舵机,所述手臂第一数字舵机的上端与手臂第一固定座传动连接,所述手臂第一数字舵机的下端与手臂第二固定座固定连接,所述手臂第二固定座与抓取手之间设置有手臂第二数字舵机,所述手臂第二数字舵机的上端与手臂第二固定座传动连接,所述手臂第二数字舵机的下端与抓取手固定连接,所述抓取手下端的一侧设置有抓取爪,所述抓取爪与抓取手之间设置有手臂第三数字舵机,所述手臂第三数字舵机的上端与抓取爪固定连接,且手臂第三数字舵机的下端与抓取爪触动连接,所述躯干区域上端内部的两侧对称固定设置有手臂驱动电机,所述手臂驱动电机的输出端与手臂第一固定座传动连接。
6、优选的,所述腿部区域的上端设置有腿部第一固定座,所述腿部第一固定座的下方设置有腿部第二固定座,所述腿部第二固定座的下方设置有腿部第三固定座,所述腿部第三固定座的下方设置有腿部第四固定座,所述腿部区域的下端设置有脚部支撑座,且脚部支撑座位于腿部第四固定座的下方,所述腿部第一固定座与腿部第二固定座之间设置有腿部第一数字舵机,所述腿部第二固定座与腿部第三固定座之间设置有腿部第二数字舵机,所述腿部第三固定座与腿部第四固定座之间设置有腿部第三数字舵机,所述腿部第四固定座与脚部支撑座之间设置有腿部第四数字舵机,所述腿部第一数字舵机的上端与腿部第一固定座传动连接,所述腿部第一数字舵机的下端与腿部第二固定座固定连接,所述腿部第一数字舵机的上端与腿部第三固定座传动连接,所述腿部第一数字舵机的下端与腿部第二固定座固定连接,所述腿部第一数字舵机的上端与腿部第三固定座传动连接,所述腿部第一数字舵机的下端与腿部第四固定座固定连接,所述腿部第一数字舵机的上端与腿部第四固定座传动连接,所述腿部第一数字舵机的下端与脚部支撑座固定连接,所述躯干区域内部的下端对称设置有两个腿部驱动电机,所述腿部驱动电机的输出端与腿部第一固定座的上端传动连接。
7、优选的,所述躯干区域内部的中间位置处设置有控制模块腔,所述控制模块腔内部的一侧等距安装有四个程序存储模块,所述程序存储模块的一侧设置有数据存储模块,所述数据存储模块的一侧设置有运动控制器和控制模块,且运动控制器位于控制模块的后侧,所述运动控制器和控制模块的一侧设置有音频模块,所述音频模块的一侧设置有声音采集模块,所述声音采集模块的一侧设置有g模块,所述躯干区域内部下端的中间位置处设置有陀螺仪,所述陀螺仪的两侧对称设置有电源模块。
8、优选的,所述机器人控制系统包括激光雷达传感器、程序存储模块、数据存储模块、运动控制器、控制模块、音频模块、声音采集模块、g模块、电源模块、陀螺仪激光雷达传感器,所述控制模块分别与程序存储模块、数据存储模块和g模块双向电性连接,所述控制模块的输出端分别与音频模块、运动控制器和陀螺仪的输入端电性连接,所述激光雷达传感器、电源模块、声音采集模块和激光雷达传感器的输出端与控制模块的输入端电性连接,所述运动控制器分别与手臂第一数字舵机、手臂第二数字舵机、手臂第三数字舵机、腿部第一数字舵机、腿部第二数字舵机、腿部第三数字舵机、腿部第四数字舵机、手臂驱动电机、第一头部转动电机、腿部驱动电机和第二头部转动电机电性连接。
9、优选的,所述腿部第四固定座下端的中间位置处安装有真空泵,所述真空泵的出气端密封连接有吸气管,所述吸气管上密封安装有吸气电磁阀,所述脚部支撑座的外端设置有第二密封圈,所述第二密封圈的内部设置有第一密封圈,所述第一密封圈与第二密封圈之间设置有密封槽,所述第一密封圈的内部等距设置有多个吸气槽,所述吸气槽的等距设置有多个吸气孔,且吸气管的下端与脚部支撑座密封连接,所述防滑条呈中心向前的v形结构。
10、优选的,所述机器人运算系统包括图像分析模块、障碍识别模块、深度识别模块、色彩识别模块、音频识别模块、人体识别模块、音频选择模块和动作控制模块;
11、其中,图像分析模块用于对摄像模块和红外摄像模块采集的图像进行分析;
12、障碍识别模块通过激光雷达传感器和红外测距传感器运动方向是否有障碍物进行检测;
13、深度识别模块对物体的高度进行识别;
14、色彩识别模块对图像中物体的色彩进行识别;
15、音频识别模块对音频进行识别;
16、人体识别模块对图像中是否有人体进行识别;
17、音频选择模块对需要播放的音频进行选择;
18、动作控制模块用于计算如何控制手臂第一数字舵机、手臂第二数字舵机、手臂第三数字舵机、腿部第一数字舵机、腿部第二数字舵机、腿部第三数字舵机、腿部第四数字舵机、手臂驱动电机、第一头部转动电机、腿部驱动电机和第二头部转动电机的运动。
19、一种基于视觉识别的人形机器人的工作方法,包括以下步骤:
20、步骤一:进行障碍跨越时,摄像模块和红外摄像模块采集障碍物图像,障碍识别模块进行分析,深度识别模块对障碍物高度进行分析,分析完成后反馈给控制模块,控制模块通过控制模块控制手臂第一数字舵机、手臂第二数字舵机、手臂第三数字舵机、腿部第一数字舵机、腿部第二数字舵机、腿部第三数字舵机、腿部第四数字舵机、手臂驱动电机、第一头部转动电机、腿部驱动电机和第二头部转动电机的运动,从而抬起脚跨越障碍物,上下台阶作业与障碍跨越控制方法相同;
21、步骤二:进行沿线走时,摄像模块和红外摄像模块采集线段图像,色彩识别模块对线段进行分析,分析完成后反馈给控制模块,控制模块通过控制模块控制手臂第一数字舵机、手臂第二数字舵机、手臂第三数字舵机、腿部第一数字舵机、腿部第二数字舵机、腿部第三数字舵机、腿部第四数字舵机、手臂驱动电机、第一头部转动电机、腿部驱动电机和第二头部转动电机的运动,从而沿着线段行走;
22、步骤三:进行追踪抓取时,摄像模块和红外摄像模块采集追踪图像并实时将追踪物位置发送给控制模块,控制模块通过控制模块控制手臂第一数字舵机、手臂第二数字舵机、手臂第三数字舵机、腿部第一数字舵机、腿部第二数字舵机、腿部第三数字舵机、腿部第四数字舵机、手臂驱动电机、第一头部转动电机、腿部驱动电机和第二头部转动电机的运动,靠近追踪物并通过手臂第三数字舵机对追踪物进行夹持,语音控制抓取时,音频识别模块分析声音,将分析后的声音转换为指令发送给控制模块通过控制模块控制手臂第一数字舵机、手臂第二数字舵机、手臂第三数字舵机、腿部第一数字舵机、腿部第二数字舵机、腿部第三数字舵机、腿部第四数字舵机、手臂驱动电机、第一头部转动电机、腿部驱动电机和第二头部转动电机的运动,让机器人执行语音命令;
23、步骤四:色块分拣时,图像分析模块对物体的色彩进行分析并发送给控制模块,控制模块通过控制模块控制手臂第一数字舵机、手臂第二数字舵机、手臂第三数字舵机、腿部第一数字舵机、腿部第二数字舵机、腿部第三数字舵机、腿部第四数字舵机、手臂驱动电机、第一头部转动电机、腿部驱动电机和第二头部转动电机的运动对符合色彩的物体进行分拣;
24、步骤五:进行口罩识别时,人体识别模块对图像中是否有人体进行分析,图像分析模块确定人脸上是否佩戴口罩,佩戴时通过音频选择模块播放已佩戴的语音,未佩戴时,播放请佩戴口罩的语音
25、步骤六:当不需要进行色彩识别时,驱动滤光膜驱动丝杆,滤光膜驱动丝杆带动滤光膜滑块向下移动,滤光膜滑块带动滤光膜从滤光膜卷筒内拉出,从而遮挡在红外测距传感器、摄像模块、红外摄像模块和激光雷达传感器的前侧,从而弱化光线的强度,保护上述元件;
26、步骤七:脚部支撑座落地时,启动真空泵正转,真空泵启动后产生负压,通过吸气管吸取吸气孔内的空气,从而让吸气槽趋近于密封状态,从而提高脚部支撑座的抓地力,当需要抬起脚部支撑座时,通过真空泵的反转向吸气槽内输入空气,从而解除吸气槽的密封状态.
27、与现有技术相比,本发明的有益效果是:
28、1.当不需要进行色彩识别时,驱动滤光膜驱动丝杆,滤光膜驱动丝杆带动滤光膜滑块向下移动,滤光膜滑块带动滤光膜从滤光膜卷筒内拉出,从而遮挡在红外测距传感器、摄像模块、红外摄像模块和激光雷达传感器的前侧,从而弱化光线的强度,保护红外测距传感器、摄像模块、红外摄像模块和激光雷达传感器不会受到强光或激光照射而损坏,当需要进行色彩识别时,再进行滤光膜的收卷,滤光膜卷筒内设置有弹簧,可通过弹力收起滤光膜
29、2.本发明脚部支撑座落地时,启动真空泵正转,真空泵启动后产生负压,通过吸气管吸取吸气孔内的空气,从而让吸气槽趋近于密封状态,从而提高脚部支撑座的抓地力,当需要抬起脚部支撑座时,通过真空泵的反转向吸气槽内输入空气,从而解除吸气槽的密封状态,从而提高了行走时,脚部支撑座落地的稳定性,保证了机器人的运动平衡。
30、3.本发明中设置陀螺仪,陀螺仪是一种用于传感和维持方向的装置,当陀螺仪检测到人形机器人失去平衡时,陀螺仪中的电机被启动,电机带动转子高速旋转在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。其稳定性随以下的物理量而改变:转子的转动惯量愈大,稳定性愈好;转子角速度愈大,稳定性愈好,从而给人形机器人提供一个平衡力,防止人形机器人倾倒损伤。
- 还没有人留言评论。精彩留言会获得点赞!