一种基于无线式机器人的涡轮发动机内窥检查系统
本发明属于航空发动机和燃气轮机维护保障领域,涉及一种基于无线式机器人的涡轮发动机内窥检查系统。
背景技术:
1、涡轮式发动机被广泛应用于航空、舰船、坦克、电力等领域,当前大部分航空发动机和燃气轮机均属于涡轮式发动机。涡轮式发动机工作环境恶劣,发生故障的概率较高,特别是位于其内部的大量叶片类零件,如压气机和涡轮叶片,需要定期进行维护保障。但由于其结构复杂,且均位于发动机内部深处,导致无法直接观察。若每次检查时都进行整体性的拆卸,不仅过程繁琐周期冗长,而且还容易在拆卸过程中对发动机造成意外损伤,对装备的出勤率和完好率也有不利影响。而内窥技术作为无损检测领域的一种重要手段,可以在不改变发动机整体状态的前提下,将视频探头通过预留的内窥孔送入发动机内部进行叶片类零件表面状态的窥探,并通过对图像的观察来识别损伤的发生,和对严重程度进行评估,以此来基本解决上述问题。
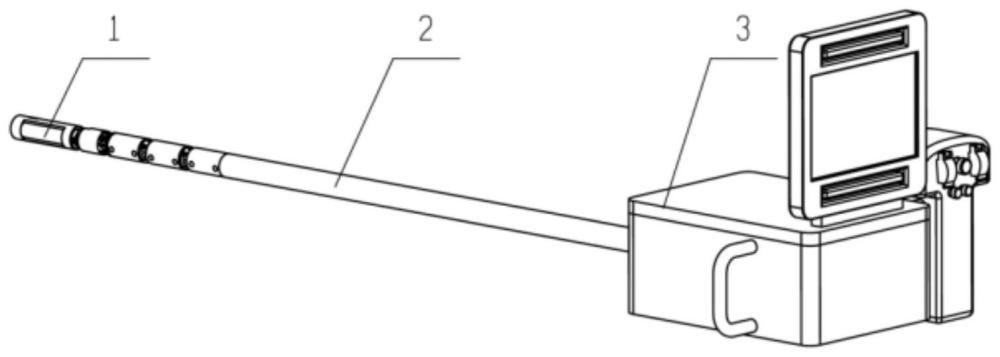
2、视频内窥镜为当前内窥技术最为常用的一类设备。典型的视频内窥镜4如图1所示,在结构上可以分为镜头及照明41、弯曲部42、导线43、外接屏幕44以及主机45。其原理是采用镜头及照明41对前方进行图像采集,借助导线43将采集到的图像数据传输到主机45的显示屏452,或连接在视频接口451上的外接屏幕44进行显示,通过对图像的分析确定故障的位置和类型。通过人为操作主机45上的控制按钮453,可以使弯曲部42向指定方向弯曲,从而调整镜头及照明41的朝向,以增大视野范围和实现对重点区域的观察。
3、图2所示是采用视频内窥镜4对涡轮发动机的动叶进行内窥检查的典型应用过程。如图2(a)所示,首先对外层机匣53上的外层机匣内窥孔堵盖安装座51进行打开操作,将镜头及照明41通过发动机上预留的外层机匣内窥孔52和位于内层机匣55上的内层机匣内窥孔54插入到发动机内部。
4、位于发动机外部的操作人员通过主机45上的显示屏452或外接屏幕44的反馈,半可控地手动调整导线43的形状,并通过主机45上的控制按钮453控制弯曲部42向指定方向弯曲,令镜头及照明41到达带内窥孔静叶56叶栅并朝向动叶57,如图2(b)所示。人工在发动机外部缓慢转动转子,使得镜头及照明41前方动叶57所在一级的所有动叶都能被依次观察到。
5、典型的内窥图像如图2(c)所示,通过与正常图像的对比,可以发现如裂纹和材料缺失等损伤问题。例如图中动叶57的尾缘出现了明显的缺口损伤,在使用中将会有折断风险,需要对发动机拆解更换,以避免造成重大事故。
6、在图2中,镜头及照明41沿径向穿过多层机匣到达静叶56叶栅并对动叶进行检查的过程中,路径内无复杂结构阻挡,较为容易实现。而在发动机内部,多级静叶和动叶形成的流道非常曲折,导致镜头很难穿过动叶57对前方静叶58进行观察,而且留在动叶叶栅内的导线43容易因为转子的转动而被叶片扭断,所以镜头及照明41沿发动机轴向运动较为困难。对于另一个方向,当镜头及照明41在发动机内部沿周向运动时,导线43需要连续弯曲,由于人工无法对导线43的运动进行精确控制,故镜头及照明41也难以沿周向准确到达各角向位置。因此镜头及照明41可达范围有限,这导致对各级动叶的检查虽然较为容易,但难以对各级静叶、外环59此类静止件进行全面观察,而这部分观察不到的视野盲区区域,约占涡轮发动机需进行内窥检查区域的40%左右,这将会导致无法被检出的问题遗留在发动机内,给发动机安全可靠运行带来巨大的挑战,迫切需要采用新设备和方法消除这些盲区,提高内窥检查的覆盖率。
技术实现思路
1、针对当前内窥设备在对涡轮发动机进行内窥检查时镜头可达范围受限,和内窥区域存在盲区的问题,发明了一种基于无线式机器人的涡轮发动机内窥检查系统。该系统可以通过含执行机构的机械臂将配套的内窥机器人送至涡轮发动机的动叶叶栅内,并使其固定在相邻两片动叶之间。当机械臂撤到安全位置后,内窥机器人可以在随转子低速转动的过程中对前方、后方的静叶,以及侧向的外环进行图像采集,并将采集到的数据通过无线方式向外发送或暂存在内窥机器人内部的存储器上,从而消除了传统内窥设备的视野盲区。在完成内窥工作后,可以再使用机械臂将内窥机器人取出,不影响发动机正常工作。
2、本发明的技术方案具体如下:
3、一种基于无线式机器人的涡轮发动机内窥检查系统,由内窥机器人、机械臂和控制箱组成,如图3所示。
4、内窥机器人在工作时位于涡轮发动机的动叶叶栅内,能够将自身固定在相邻两片动叶之间,并随转子低速转动而不发生脱落。内窥机器人在随转子缓慢转动的过程中,可以利用内部多个不同朝向的摄像头和配套的照明设备进行图像采集,并将采集到的数据通过无线方式向外发送,或者暂存在机器人内部的存储器上,待从发动机内取出后另行读取。
5、根据固定时采用执行机构的不同,可以有多种形式的内窥机器人,其中典型为气囊式。图4所示的气囊式内窥机器人包括外壳、内部的电路系统和气囊结构。其中气囊结构在不充气时蜷缩于外壳的内部。采用外部输入的方式,可以使气体经过气囊接嘴进入气囊内部使其发生膨胀。当停止输气后,气囊接嘴对气体的单向导通作用能够将气体密封在气囊内部,以维持气囊的膨胀状态。当气囊式内窥机器人位于动叶叶栅时,可以通过气囊的膨胀对相邻两片叶片产生挤压,从而利用摩擦力将自身固定在动叶之间,并且能够随转子缓慢转动。气囊式内窥机器人在随转子转动过程中,前视摄像头及led灯、侧视摄像头及led灯和后视摄像头及led灯可以进行图像采集,并将采集到的数据通过wi-fi模块向外发送。电池用于存储电能,并为各摄像头及led灯和电路供电,可以通过充电电路板为其进行充电。对于各电气设备的开启、关停等控制,由主控电路板实现。在外壳底部的设置有夹持手柄,以实现机械臂对气囊式内窥机器人进行夹持、释放和充放气等操作。
6、机械臂的作用是对内窥机器人进行夹持和释放等操作,并在将内窥机器人送至动叶叶栅后,提供动力对其进行操作,例如通过对气囊式内窥机器人的气囊进行充气等作动使其固定在叶栅中。典型的机械臂为蛇形,例如图5所示的为一种蛇形机械臂,主要由位于端部的蛇形臂执行单元、中间的多个弯曲单元,和位于根部的刚性段组成,可以在外部控制的操作下,进行一定程度的弯曲和端部蛇形臂执行单元的作动。
7、图6为蛇形臂执行单元的典型工作过程。首先蛇形机械臂向气囊式内窥机器人运动,过程中通过有线摄像头及led灯对前方视野进行观察,用于判断位于蛇形臂执行单元上的机械手与气囊式内窥机器人上的夹持手柄之间的相对位置。通过调整位置使充气嘴插入气囊接嘴后,机械手通过机械手控制绳索的牵引实现闭合,以此来夹持住气囊式内窥机器人的夹持手柄,此时可以进一步通过与输气管相连的气泵对气囊进行充放气操作,从而实现蛇形臂执行单元对气囊式内窥机器人的夹持、释放和充放气等一系列动作。
8、所述的控制箱的结构如图7所示,其作用是通过控制手柄控制机械臂的动作,同时通过屏幕对内窥检查系统工作过程中产生的图像等数据进行显示。以蛇形机械臂为例,通过蛇形臂安装座与箱体相连接,并将机械手控制绳索、蛇形臂控制绳索以及输气管等对蛇形机械臂起到控制作用的线路和管路连接到箱体内的驱动模组。驱动模组主要由电机、继电器和气泵或其他执行电器构成,其中电机通过驱动控制绳索进而控制蛇形机械臂的弯曲,和机械手以及其他以控制绳索为动力的机构进行作动。气泵可以对气囊式内窥机器人进行输气。当使用不同类型的内窥机器人时,可以采用其他作动形式的执行电器,如直线电机或继电器等。驱动模组和控制手柄与电路板相连接,通过控制手柄上的按键可以对驱动模组进行控制。控制手柄和箱体之间采用刚性连接,由此操作人员可以握住把手和控制手柄移动控制箱,通过箱盖上的屏幕观察图像,同时还能对控制手柄进行操作。
9、本发明采用的技术方案与现有技术相比,具有以下有益效果:
10、1、镜头可随发动机转子旋转,可观察范围提高,消除原有内窥方法的盲区
11、该系统可以将无线式内窥机器人送至动叶叶栅,并使其固定在动叶之间。相比于传统内窥镜工作时镜头位置固定且可达范围有限的缺点,该系统的镜头可以随转子转动,因此能够在转动过程中对传统有内窥方法的盲区进行图像采集,配合已有的检查方法,可将对涡轮发动机检查的内窥覆盖率从原来的60%左右共同提升到100%。
12、2、可在无线条件下工作
13、传统内窥镜的镜头与主机之间为有线连接,用以控制镜头所达位置和进行信号的传输,因此在进行内窥检查时,其导线必须要留在发动机内部,并且在检查静止件时,要求发动机保持静止,转子不能转动。而本发明在内窥机器人固定在相邻动叶之间后,其余设备可以与其断开物理连接,并撤到发动机外部,内窥机器人采用无线方式进行工作,允许发动机的转子在人为驱动下缓慢转动。通过这种无线的方式,除掉镜头与主机之间的连接束缚,扩展了内窥检查的使用场景和使用效能。
14、3、可控程度高
15、传统内窥镜的导线为半刚性弯折,由于缺少关节而不能进行弯曲度的精确控制。在插入发动机后,会在自身刚度、重力和周围环境的阻挡下自然弯曲,对其弯曲的控制只能凭借人工粗略调整,无法准确地到达操作者预期的位置。本发明的机械臂由多个关节组成,各个关节之间的弯曲幅度和方向可通过驱动模组进行精确控制,以此来使机械臂穿过发动机的复杂结构,使内窥机器人被准确地送入到发动机特定位置。机器人潜入和撤出的可控程度高,使本发明所用内窥方法得以实现。
16、4、对发动机无破坏
17、当使用传统内窥镜进行内窥检查时,由于存在盲区,最终仍要对盲区所在部分进行拆卸检查,而拆卸和组装的过程不仅费时费力,而且容易对发动机造成不可逆的破坏。采用该系统进行内窥检查时,通过机械臂携带内窥机器人由发动机自身预设的内窥孔进出发动机内部,这一过程中对发动机零部件的拆卸仅限制在内窥孔附近,内窥机器人在发动机内部工作时中也不会对周围结构造成破坏。由于该系统能够配合已有的检查方法将内窥覆盖率提高到100%,因此也避免了因存在内窥盲区而带来的拆卸过程。所以使用该系统后,进行内窥检查时仅需打开发动机的少部分结构,对发动机整体不造成影响。
18、5、能同时采集三个画面,图像采集效率高
19、已有内窥镜结构上通常只有一个镜头,因此工作时只能对单一方向进行图像采集,如果需要对不同角度进行观察,需要更换镜头前的折转透镜,以及重复多次转子转动过程,导致完成整个内窥检查过程需要较多的时间。并且由于镜头弯曲角度的限制,无法完成对后方物体的观察。而本发明的内窥机器人内部设置有前、侧和后共计三个不同朝向的摄像头及照明设备,能在工作过程中随转子旋转一周的同时,实现对内窥机器人前方和后方共计两排静叶以及侧方的转子外环进行三个方向的图像采集,大大提高了工作效率。
20、6、可以与发动机叶片紧密结合,不会掉入发动机内部,可靠性高
21、本发明中的内窥机器人可以采取气囊、抓手等多种形式的执行机构使得自身与叶片相固定,并且采用外部动力的输入来提高抓紧的力和力矩,避免机器人本身体积小,动力弱的限制,从而实现机器人随发动机转子缓慢转动而不发生脱落,杜绝掉入发动机内部无法取出影响使用安全的问题。
22、7、带照明系统,保证图像质量
23、发动机内部由于机匣、叶片等零部件的遮挡,光线昏暗照度低,如果直接在该环境下进行图像采集,获得的图像将无法清晰表现出被观察零件的表面特征,容易导致后续诊断时无法对零件的状态进行判别或者产生误判。该系统使用的内窥机器人对于内部的每个摄像头均配有照明电路,以及采用机载电池供电,对视野区域进行足够的可见光照明,以此来保证采集到清晰的高质量图像和对故障判别的准确度。
24、8、通过无线发射实现信号传输,可获得实时图像。
25、内窥机器人在进出发动机和随转子缓慢转动进行图像采集的过程中,可以通过内置的无线信号收发模块(例如wi-fi模块)将自身产生的传感器数据和镜头采集到的图像实时向外部进行发送,使得发动机外部的操作人员可以及时地获得内窥过程中的图像以及内窥机器人的位置和状态信息,以此实现对故障进行在线的诊断和更真实的判别。
26、9、通过自身携带存储器解决图像存储问题,杜绝信号窃取风险
27、在对有保密要求的涡轮发动机进行内窥检查时,可以将内窥机器人的wi-fi模块更换为存储模块,将内窥机器人采集到的图像数据暂时存储在内窥机器人内部而不通过无线方式向外发送。在内窥机器人完成图像采集并被取出发动机后,通过有线方式将存储模块内的图像数据导出,避免因信号无线传输带来的被窃取风险和失泄密问题。
- 还没有人留言评论。精彩留言会获得点赞!