踝关节及足部外骨骼穿戴设备的制作方法
本发明涉及穿戴式外骨骼设备,具体而言涉及一种踝关节及足部外骨骼穿戴设备。
背景技术:
1、随着人工智能的发展,为使用者提供负重、支撑和动力等辅助功能的助力、助行等穿戴式外骨骼设备得到广泛应用,适用于户外作业、医疗康复、体育竞技、军事训练、娱乐表演以及物流运输等多个行业,使人体运动能力得到增强,提升工作效率。
2、柔性外骨骼进几年来得到快速发展,足部作为直接将负载的重量传递到地面上的模块组成,其运动形态是外骨骼运动意图识别最为关键的部分之一。目前市场上的足部外骨骼设备普遍比较笨重,体积和重量都较大,舒适性交叉,虽然经过十余年的发展,踝关节及足部外骨骼的使用寿命和集成化程度有所改善,但仍然表现得十分笨重,极大降低了人机匹配性和穿戴舒适度;同时,由于存在无法同时兼顾步态识别灵敏性和准确性的缺点,严重制约外骨骼的步态识别的效果。
技术实现思路
1、本发明第一方面提出一种技术方案,一种踝关节及足部外骨骼穿戴设备,包括:
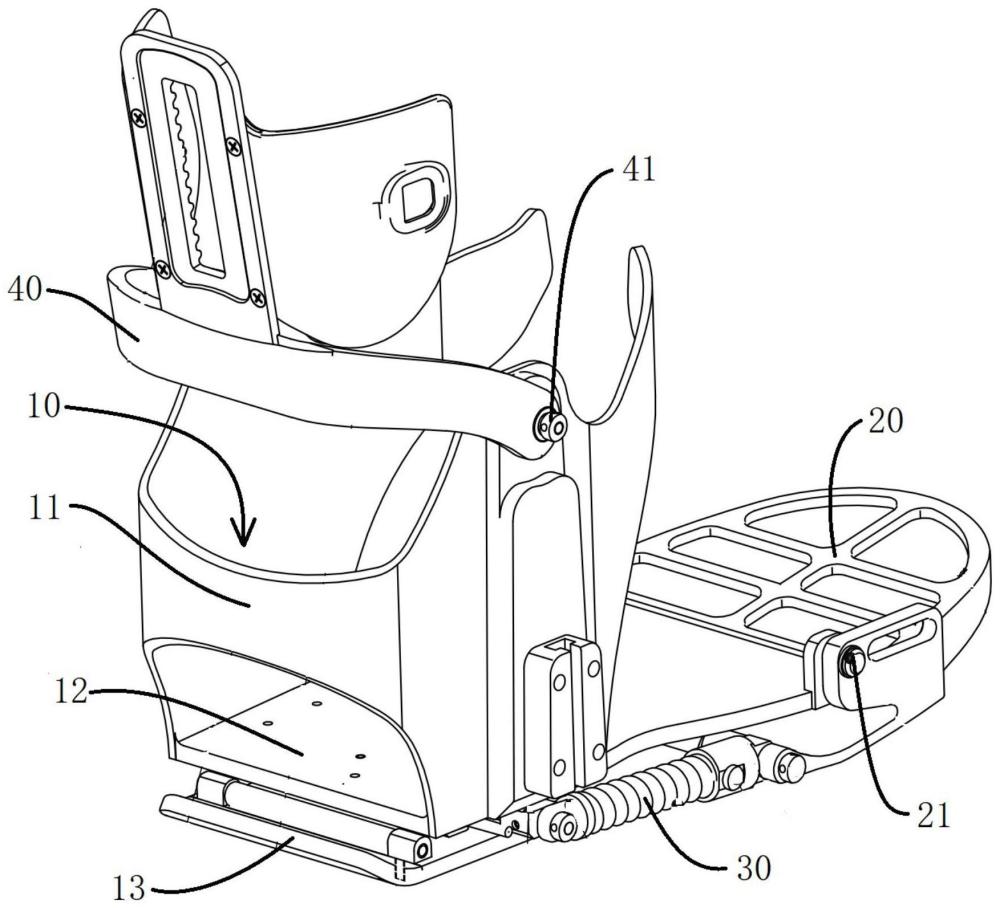
2、足部支撑部件,所述足部支撑部件包括足侧支撑结构以及足底结构;
3、前掌支撑部件,连接到所述足底结构的前端,并用于承托用户的脚掌;
4、踝关节过渡部件,连接到所述足侧支撑结构的上部,并能相对于所述足侧支撑结构转动,所述踝关节过渡部件向上用于连接到小腿支撑结构;
5、其中,所述足底结构包括上、中、下三层结构,所述上层结构包括第一底板,所述第一底板固定连接到所述足侧支撑结构的底部,在所述第一底板和足侧支撑结构之间形成容纳用户足部的空间,所述第一底板上安装步态传感器,所述下层结构包括第二底板,所述中层结构包括弹性支撑结构,所述弹性支撑结构连接第一底板以及第二底板;
6、所述前掌支撑部件分别连接到第一底板和第二底板,当所述前掌支撑部件与所述第一底板发生相对角度变化时,所述第一底板和第二底板产生相对位移,所述弹性支撑结构用于储存和释放第一底板和第二底板相对运动时产生的能量。
7、优选的,所述前掌支撑部件设有第一连接部和第二连接部,所述第一底板靠近所述前掌支撑部件的一端与第一连接部通过第一转动结构铰接,所述第二底板靠近所述前掌支撑部件的一端与第二连接部通过第二转动结构连接。
8、优选的,所述第二转动结构在所述第一转动结构的下方,并相较于第一转动结构处于更靠近足心的位置。
9、优选的,所述弹性支撑结构包括支撑板和一对弹性杆结构,所述支撑板的第一端通过第三转动结构连接到所述第一底板,第二端通过第四转动结构连接到所述第二底板远离前掌支撑部件的一端,所述弹性杆结构的第一端连接到第三转动结构,第二端连接到所述第二转动结构。
10、优选的,所述第一转动结构、第二转动结构、第三转动结构和第四转动结构之间的刚性结构构成连杆机构,所述支撑板构成第一连杆,第二底板构成第二连杆、前掌支撑部件构成第三连杆,第一底板构成第四连杆,当所述前掌支撑部件与所述第一底板发生相对角度变化时,所述第三连杆和第四连杆之间的角度发生变化。
11、优选的,所述第一连杆、第二连杆和弹性杆结构之间构成钝角三角形,其中,弹性杆结构和第一连杆之间的夹角是钝角;所述弹性杆结构被设置为当钝角的角度变大时被压缩,角度变小时被释放。
12、优选的,所述第三连杆、第四连杆和弹性杆结构之间构成钝角三角形,其中,第三连杆和弹性杆结构之间的夹角是钝角;所述弹性杆结构被设置为当钝角的角度变小时被释放,角度变大时被压缩。
13、优选的,所述步态传感器安装在第一底板靠近第三转动结构的位置。
14、优选的,所述步态传感器包括安装板和传感器,所述安装板连接到第一底板的底部,所述传感器设置在所述安装板与第一底板之间。
15、优选的,所述前掌支撑部件上设有第一绑带,所述足侧支撑结构设有第二绑带。
16、与现有技术相比,本申请的优点在于:
17、本申请将将踝关节连接机构、鞋体结构、绑缚结构、信息采集系统一体化设计,整合在足部系统上,整体设计结构紧凑,集成度高,抗偏载能力强,不易损坏,且足底结构设置成三层结构,配合独立设置的前掌支撑部件构成连杆机构,从穿戴舒适度和步态特征识别方面都得到了提升。
技术特征:
1.一种踝关节及足部外骨骼穿戴设备,其特征在于,包括:
2.根据权利要求1所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述前掌支撑部件(20)设有第一连接部(201)和第二连接部(202),所述第一底板(12)靠近所述前掌支撑部件(20)的一端与第一连接部(201)通过第一转动结构(21)铰接,所述第二底板(13)靠近所述前掌支撑部件(20)的一端与第二连接部(202)通过第二转动结构(22)连接。
3.根据权利要求2所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述第二转动结构(22)在所述第一转动结构(21)的下方,并相较于第一转动结构(21)处于更靠近足心的位置。
4.根据权利要求2或3所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述弹性支撑结构包括支撑板(14)和一对弹性杆结构(30),所述支撑板(14)的第一端通过第三转动结构(121)连接到所述第一底板(12),第二端通过第四转动结构(131)连接到所述第二底板(13)远离前掌支撑部件(20)的一端,所述弹性杆结构(30)的第一端连接到第三转动结构(121),第二端连接到所述第二转动结构(22)。
5.根据权利要求4所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述第一转动结构(21)、第二转动结构(22)、第三转动结构(121)和第四转动结构(131)之间的刚性结构构成连杆机构,所述支撑板(14)构成第一连杆(14),第二底板(13)构成第二连杆(15)、前掌支撑部件(20)构成第三连杆(16),第一底板(12)构成第四连杆(17),当所述前掌支撑部件(20)与所述第一底板(12)发生相对角度变化时,所述第三连杆(16)和第四连杆(17)之间的角度发生变化。
6.根据权利要求5所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述第一连杆(14)、第二连杆(15)和弹性杆结构(30)之间构成钝角三角形,其中,弹性杆结构(30)和第一连杆(14)之间的夹角是钝角;所述弹性杆结构(30)被设置为当钝角的角度变大时被压缩,角度变小时被释放。
7.根据权利要求5所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述第三连杆(16)、第四连杆(17)和弹性杆结构(30)之间构成钝角三角形,其中,第三连杆(16)和弹性杆结构(30)之间的夹角是钝角;所述弹性杆结构(30)被设置为当钝角的角度变小时被释放,角度变大时被压缩。
8.根据权利要求5所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述步态传感器(50)安装在第一底板(12)靠近第三转动结构(121)的位置。
9.根据权利要求1所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述步态传感器(50)包括安装板(51)和传感器(52),所述安装板(51)连接到第一底板(12)的底部,所述传感器(52)设置在所述安装板(51)与第一底板(12)之间。
10.根据权利要求1所述的踝关节及足部外骨骼穿戴设备,其特征在于,所述前掌支撑部件(20)上设有第一绑带,所述足侧支撑结构(11)设有第二绑带。
技术总结
本发明涉及穿戴式外骨骼设备技术领域,具体而言涉及一种踝关节及足部外骨骼穿戴设备,包括:足部支撑部件,所述足部支撑部件包括足侧支撑结构以及足底结构;前掌支撑部件,连接到所述足底结构的前端,并用于承托用户的脚掌;踝关节过渡部件,连接到所述足侧支撑结构的上部,并能相对于所述足侧支撑结构转动,所述踝关节过渡部件向上用于连接到小腿支撑结构。本申请将将踝关节连接机构、鞋体结构、绑缚结构、信息采集系统一体化设计,整合在足部系统上,整体设计结构紧凑,集成度高,抗偏载能力强,不易损坏,且足底结构设置成三层结构,配合独立设置的前掌支撑部件构成连杆机构,从穿戴舒适度和步态特征识别方面都得到了提升。
技术研发人员:魏巍,林西川,曹顺风
受保护的技术使用者:迈宝智能科技(苏州)有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!