一种PPU组合机械手的制作方法
本发明涉及机械自动化,具体涉及一种ppu组合机械手。
背景技术:
1、机械手即能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。ppu凸轮机械手是常见的一种高速拾放移动机械手,如中国发明专利申请cn112296980a公开的一种ppu高速拾放移动机械手,又比如申请人在先申请的发明专利申请cn116810807a公开的一种机械手。上述ppu机械手均是通过ppu驱动模组,搭配十字型的导轨,实现整体的升降与平移动作,机械手在抓取相应产品后,能够带动产品沿门型轨迹移动,从而实现产品的转移搬运。
2、但是常规ppu机械手只能实现两点之间的抓取搬运,运动行程固定而无法调整,为了满足柔性产品的自动上料,通常的做法是在ppu机械手的基础上,再额外增加一组x-y-c三轴运动模组。
3、其具体做法可以是将ppu机械手整体安装在x-y轴运动模组上,通过x-y轴运动模组带动ppu机械手整体沿x-y轴方向移动,从而增加动作范围,同时ppu机械手的导轨端部安装c轴运动模组,实现角度旋转,从而满足各种产品的抓取上料,但是这种做法,使得ppu机械手整体都放在x-y轴运动模组上,x-y轴运动模组承受所有的重量,为避免过大的运动惯性,保证动作稳定,x-y轴动作速度将会受到限制,难以实现超高速动作。
4、除此之外,也可以是将x-y-c运动模组全部安装在ppu机械手的导轨上,利用多个电机搭配多组带传动的方式,实现x-y-c三轴运动,从而满足各种产品的抓取上料。但是这种做法,则是由ppu机械手承受所有的重量,为避免过大的运动惯性,保证动作稳定,ppu机械手动作速度将会受到限制,难以实现超高速动作。
5、因此,不管采用哪种方式,整体移动重量都很大,从而大大影响了整体的运行速度,难以实现超高速动作。
技术实现思路
1、为了克服背景技术的不足,本发明提供一种ppu组合机械手。
2、本发明所采用的技术方案:一种ppu组合机械手,包括:
3、机座;
4、ppu驱动模组,其固定安装在机座上;
5、z轴导轨,其固定安装在ppu驱动模组的固定背板上;
6、x轴导轨,其与ppu驱动模组连接,并通过十字滑块与z轴导轨活动连接,所述x轴导轨能沿x-z轴方向移动;
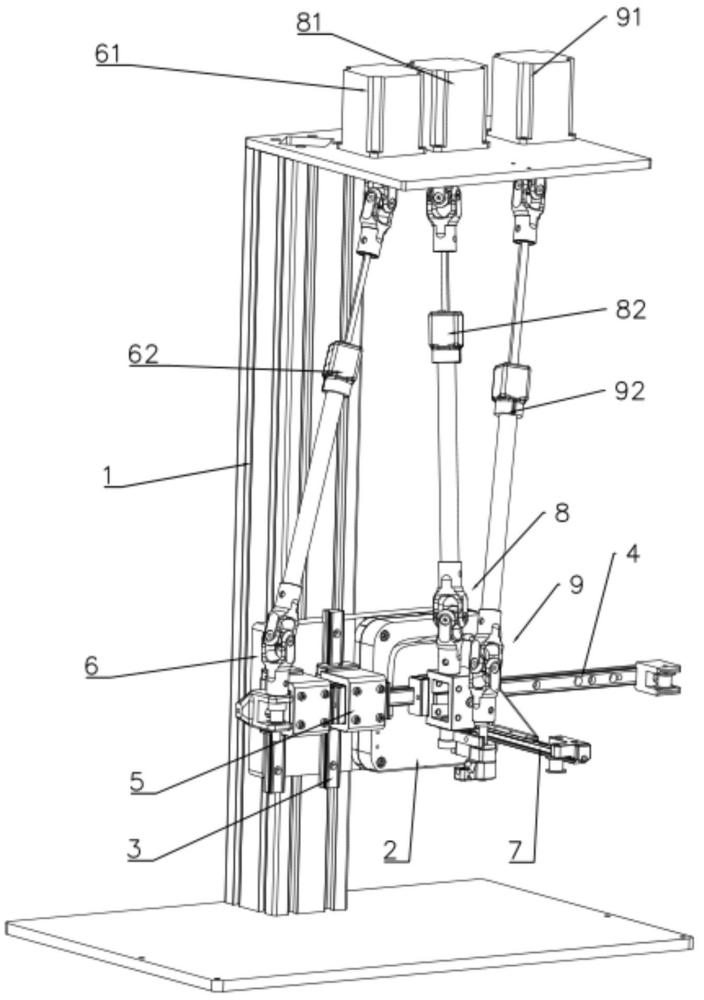
7、x轴运动模组,其包括第一电机、第一伸缩轴、两个第一同步轮、第一滑块,所述第一电机固定安装在机座上,两个第一同步轮分别设置在x轴导轨的两端,并通过第一同步带连接,所述第一滑块滑动设置在x轴导轨上,并与第一同步带固定连接,所述第一伸缩轴采用轻型材料,其一端与第一电机万向连接,另一端与其中一个第一同步轮万向连接;
8、y轴导轨,其一端与第一滑块固定连接;
9、y轴运动模组,其包括第二电机、第二伸缩轴、两个第二同步轮、第二滑块,所述第二电机固定安装在机座上,两个第二同步轮分别设置在x轴导轨的两端,并通过第二同步带连接,所述第二滑块滑动设置在x轴导轨上,并与第二同步带固定连接,所述第二伸缩轴采用轻型材料,其一端与第二电机万向连接,另一端与其中一个第二同步轮万向连接;
10、c轴运动模组,其包括第三电机、第三伸缩轴、旋转连接头,所述第三电机固定安装在机座上,所述旋转连接头可旋转地安装在第二滑块上,所述第三伸缩轴采用轻型材料,其一端与第三电机万向连接,另一端与其中旋转连接头万向连接。
11、所述第一伸缩轴包括连接管、连接座、伸缩导轨,所述连接管一端与第一同步轮万向连接,另一端安装连接座,所述伸缩导轨一端与第一电机万向连接,另一端穿过连接座伸入连接管,并与连接座滑移配合。
12、所述连接管采用碳纤维管。
13、所述第二伸缩轴、第三伸缩轴的结构与第一伸缩轴的结构相同。
14、所述第一同步轮通过第一安装座安装在x轴导轨上,其中一个第一安装座与x轴导轨活动配合,并用于张紧第一同步带的张紧组件。
15、所述第二同步轮通过第二安装座安装在y轴导轨上,其中一个第二安装座与y轴导轨活动配合,并用于张紧第二同步带的张紧组件。
16、本发明的有益效果是:采用以上方案,在ppu驱动模组的x轴导轨上额外设置了x轴运动模组、y轴运动模组、c轴运动模组,解决了常规ppu机械手只能两点抓取移动的局限性,使其能够满足更大范围的自动拾移动作;同时将驱动x-y-c运动模组动作的各个电机全部安装在机座上,并利用重量更轻的伸缩轴实现传动连接,大大减轻了ppu驱动模组所需要承受的移动重量,从而能够使ppu驱动模组动作速度更快,提高整体运行速度。
技术特征:
1.一种ppu组合机械手,包括:
2.根据权利要求1所述的ppu组合机械手,其特征在于:所述第一伸缩轴(62)包括连接管(621)、连接座(622)、伸缩导轨(623),所述连接管(621)一端与第一同步轮(63)万向连接,另一端安装连接座(622),所述伸缩导轨(623)一端与第一电机(61)万向连接,另一端穿过连接座(622)伸入连接管(621),并与连接座(622)滑移配合。
3.根据权利要求2所述的ppu组合机械手,其特征在于:所述连接管(621)采用碳纤维管。
4.根据权利要求3所述的ppu组合机械手,其特征在于:所述第二伸缩轴(82)、第三伸缩轴(92)的结构与第一伸缩轴(62)的结构相同。
5.根据权利要求1所述的ppu组合机械手,其特征在于:所述第一同步轮(63)通过第一安装座(65)安装在x轴导轨(4)上,其中一个第一安装座(65)与x轴导轨(4)活动配合,并设有用于张紧第一同步带的张紧组件。
6.根据权利要求1所述的ppu组合机械手,其特征在于:所述第二同步轮(83)通过第二安装座(85)安装在y轴导轨(7)上,其中一个第二安装座(85)与y轴导轨(7)活动配合,并设有用于张紧第二同步带的张紧组件。
技术总结
一种PPU组合机械手,其特征在于,X轴运动模组、Y轴运动模组、C轴运动模组的电机均安装底座上,并通过轻型伸缩杆实现传动连接。其优点在于:在PPU驱动模组的X轴导轨上额外设置了X轴运动模组、Y轴运动模组、C轴运动模组,解决了常规PPU机械手只能两点抓取移动的局限性,使其能够满足更大范围的自动拾移动作;同时将驱动X‑Y‑C运动模组动作的各个电机全部安装在机座上,并利用重量更轻的伸缩轴实现传动连接,大大减轻了PPU驱动模组所需要承受的移动重量,从而能够使PPU驱动模组动作速度更快,提高整体运行速度。
技术研发人员:陈涵
受保护的技术使用者:温州市日康机械科技厂
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!