一种可实现多形态抓取的机械手
本发明涉及机器人,尤其是涉及一种可实现多形态抓取的机械手。
背景技术:
1、随着人类活动空间的不断延伸,特别在一些不适合人类活动的极限空间或危险场景内,利用机器人末端手爪对目标对象开展一些必要的抓取、扭转、平移等操作任务,对拓展人类生产生活空间、提升人类操作能力、降低人类受伤风险、提高机器人智能化水平都有着非常重要的理论研究意义和实际的使用价值。
2、近些年来,面向更为广泛的应用场景,具备多指、多关节并具有一定外界信息感知功能的类人型多指机械手的研究进入了迅速发展时期。多指机械手的新型机构设计、智能控制方法及运动规划等方向已经成为机器人领域的热门研究方向之一。如文献“一种空间混联球铰三杆耦合传动的三自由度灵巧手手指”(cn117047809a)为了解决传统刚性三指灵巧手的手指集成度低、自由度少、负载力小等问题,提出了一种空间混联球铰三杆耦合传动的三自由度灵巧手手指,以期望提高手指的灵活性和运动自由度。文献“仿生拉压体多自由度灵巧手”(cn114290357a)公开了一种仿生拉压体多自由度灵巧手,包括远端手臂、手腕、手掌、拇指和四指,实现了接近于人类手指的灵活性和柔顺性。文献“一种机器人多指灵巧手”(cn113910274a)公开了一种利用齿轮与传动带组合成驱动单元的刚性连杆式多指机械手,其每个手指的运动控制都设置一个组合式驱动器。文献“一种力感知结构、灵巧手手指及多指灵巧手”(cn110640775a)公开了一种对多指灵巧手抓取物体过程中的力感知结构并设计了灵巧手手指和多种灵巧手。文献“一种腱绳-电磁力联合驱动的刚软耦合多指灵巧手”(cn109176568a)公开了一种新型多指灵巧手,采用腱绳和电磁力联合驱动的关节驱动方式,以实现多指灵巧手与被抓取对象的刚柔耦合效果,提高抓取的稳定性和抓取力。
3、目前,多指机械手被应用于目标抓取任务时,为了实现对目标物体的稳定抓取,一方面需要多指机械手具有足够度的自由度来实现其灵巧性;另一方面需要多指机械手具有足够的负载力,能够实现较大负载范围的对象抓取。此外,在实际应用中,用户迫切需要所使用的多指机械手能够实现对多种形态的目标物进行抓取,希望机械手可以依据被抓取对象自动适配抓取形态,而不必更换手爪。
4、目前,随着机器人技术在极限任务空间中应用场景的不断推广,并鉴于传统多指机械手存在结构复杂、负载能力弱、维护成本高、难以适配多种抓取形态以及控制复杂等问题,急需一种能够解决上述问题实现大负载、驱动与控制简单且适配多种抓取形态的多指机械手。
技术实现思路
1、本发明的目的就是为了提供一种可实现多形态抓取的机械手。
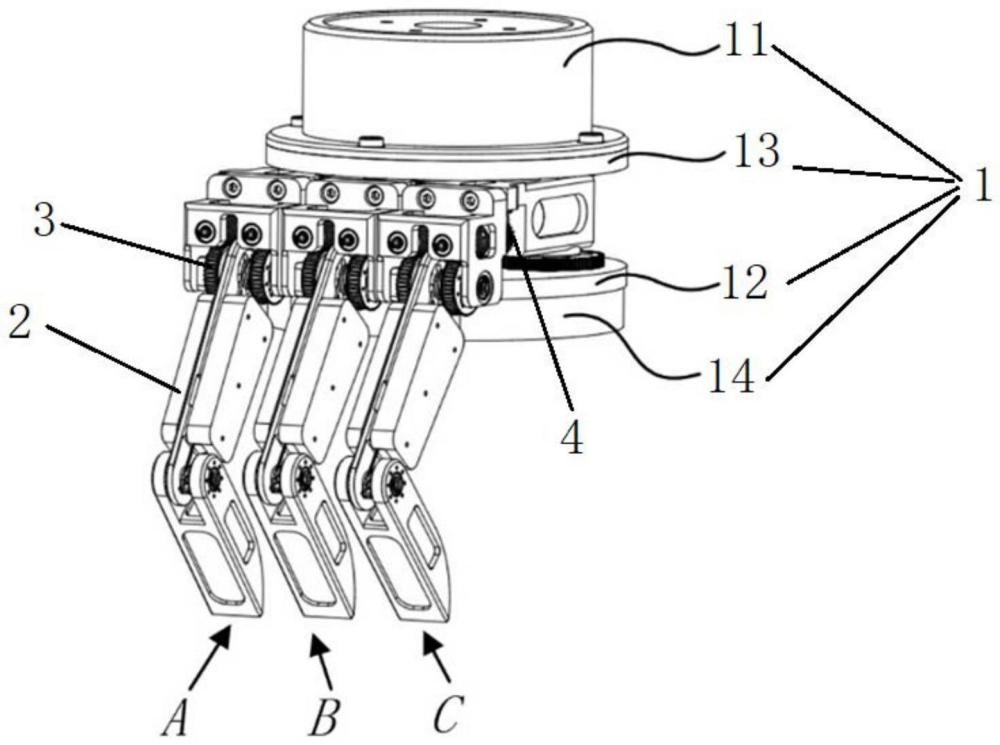
2、本发明的目的可以通过以下技术方案来实现:一种可实现多形态抓取的机械手,包括手掌机构、两关节手指机构、指关节驱动机构和掌内动力驱动机构;
3、多根所述两关节手指机构设置在手掌机构上,所述掌内动力驱动机构设置在手掌机构上,能驱动部分两关节手指机构绕手掌机构轴心旋转,指关节驱动机构包括第一指关节驱动机构和第二指关节驱动机构,第一指关节驱动机构和第二指关节驱动机构均与掌内动力驱动机构连接。
4、优选地,所述两关节手指机构包括第一指连杆和第二指连杆,第一指连杆上设有第一旋转轴,第二指连杆上设有第二旋转轴;
5、所述第一指关节驱动机构包括第一涡轮、第一涡杆,第二指关节驱动机构包括第二涡轮和第二涡杆;
6、所述第一涡轮与第一旋转轴固联,并与第一涡杆配合,第二涡轮与第一旋转轴转动连接,并与第二涡杆配合,第二涡轮通过驱动绳与第二旋转轴连接传动;
7、所述掌内动力驱动机构包括用于驱动第一涡杆和第二涡杆运动的关节驱动器。
8、进一步优选地,所述关节驱动器的输出轴上设有关节驱动齿轮,第一涡杆和第二涡杆分别连接第一驱动齿轮和第二驱动齿轮,关节驱动齿轮与第一驱动齿轮和第二驱动齿轮啮合。
9、更进一步优选地,所述第一驱动齿轮通过驱动轴与第一涡杆连接,第一驱动齿轮与驱动轴螺纹连接,在驱动轴上套有压缩弹簧,压缩弹簧一端与第一驱动齿轮相接触。
10、进一步优选地,所述第二旋转轴上设有旋转轴驱动绳缠绕器,该驱动绳缠绕器与第二指连杆固联,第二涡轮也固联有指根关节驱动绳缠绕器,驱动绳两端连接旋转轴驱动绳缠绕器和指根关节驱动绳缠绕器。
11、优选地,每根所述两关节手指机构上均设有指关节驱动机构,每个指关节驱动机构均对应连接有一个关节驱动器。
12、优选地,所述手掌机构包括基座,掌内动力驱动机构包括固定在基座上的旋转驱动器,旋转驱动器输出轴上设有旋转驱动齿轮,旋转驱动齿轮与惰轮啮合;
13、所述两关节手指机构包括连接座和与连接座连接的旋转齿轮;
14、所述旋转驱动齿轮和惰轮分别与不同两关节手指机构的旋转齿轮啮合。
15、进一步优选地,所述机械手包括三个两关节手指机构,其中一个两关节手指机构固定,另外两个两关节手指机构的旋转齿轮分别与旋转驱动齿轮和惰轮啮合。
16、进一步优选地,所述手掌机构还包括手掌和动力驱动机构组件板;
17、所述基座上环设有动力驱动机构组件板,基座通过连接柱与手掌连接,惰轮和旋转齿轮转动设置在手掌上。
18、更进一步优选地,所述手掌上设有手掌垫。
19、优选地,所述机械手安装于机械臂末端关节上。
20、优选地,所述手掌机构上设有三根两关节手指机构。
21、进一步优选地,其中一根两关节手指机构固定,不可绕着手掌机构轴心旋转,另外两根两关节手指机构可以在掌内动力驱动机构驱动下绕着手掌机构轴心旋转。
22、优选地,所述掌内动力驱动机构连接有控制器。
23、进一步优选地,所述关节驱动器和旋转驱动器连接有控制器。
24、与现有技术相比,本发明具有以下有益效果:
25、1.本发明提出的多指机械手中有部分手指可绕着手掌中心点做主动旋转运动,可依据不同的抓取对象进行多种形态的抓取,相比较于传统固定手指的多指灵巧手,其功能更加丰富,适配的抓取对象更多。
26、2.本发明提出的多指机械手每一根手指有两个主动控制关节,两个关节的张开与闭合控制由一个驱动器完成,相比较于现有多指灵巧手每一关节都配置驱动器而言,本发明提出的多指机械手的运动学计算与控制方法更为简单,系统维护更为方便。
27、3.本发明提出的多指机械手每一根手指上具有机械开关功能,当第一指关节受到的外部接触力超过设定力矩时,该指关节将自动从驱动器输出轴上脱离,达到自我安全保护的功能。
28、4.本发明提出的多指机械手关节具有自锁功能,可现实小驱动力对大负载的稳定抓取。
29、5.本发明多指机械手机械结构上具备多形态抓取特性,可针对不同的抓取对象进行手指分布状态的自适应调整,增强了抓取对象的范围。
30、6.本发明多指机械手用一个驱动器实现两个指关节采用不同的驱动形态,且第一关节具有机械解锁功能。
31、7.本发明多指机械手结构紧凑、抓取范围大,二手指关节联动,抓取形态更拟人。
32、8.本发明多指机械手有别于主动控制性多指灵巧手,机械结构简单、成本低廉、易于维护;
33、9.本发明多指机械手可实现模块化设计,方便与现有机器人系统进行整合,具备较强的系统兼容性。
- 还没有人留言评论。精彩留言会获得点赞!