一种基于rpa的机器人可视化巡逻方法与流程
本发明涉及可视化巡逻,具体为一种基于rpa的机器人可视化巡逻方法。
背景技术:
1、机器人流程自动化简称rpa,是以软件机器人及人工智能(ai)为基础的业务过程自动化科技。
2、机器人流程自动化(rpa)系统是一种应用程序,它通过模仿最终用户在电脑的手动操作方式,提供了另一种方式来使最终用户手动操作流程自动化。
3、在进行路况巡逻时会使用巡逻机器人,巡逻机器人可以根据预先设定好的程序进行往返运动并对外部环境进行巡视:
4、1、现有的巡逻机器人在巡逻时只能在用户预设好的路线内进行往返巡视,导致在使用时需要用户重复设置路线,且无法根据实时路况自主规划路线,需要与巡视人员配合才能完成巡逻,不仅提高了人力与使用成本,且巡逻效率低。
5、2、现有的巡逻机器人可以通过摄像头将巡逻画面实时传输至显示终端上,但是以上操作需要用户始终关注每一个巡逻画面,在遇到突发危险时无法进行自动识别,极易出现危险情况误报与漏报的情况。
技术实现思路
1、本发明的目的在于提供一种基于rpa的机器人可视化巡逻方法,以解决上述背景技术中提出的问题。
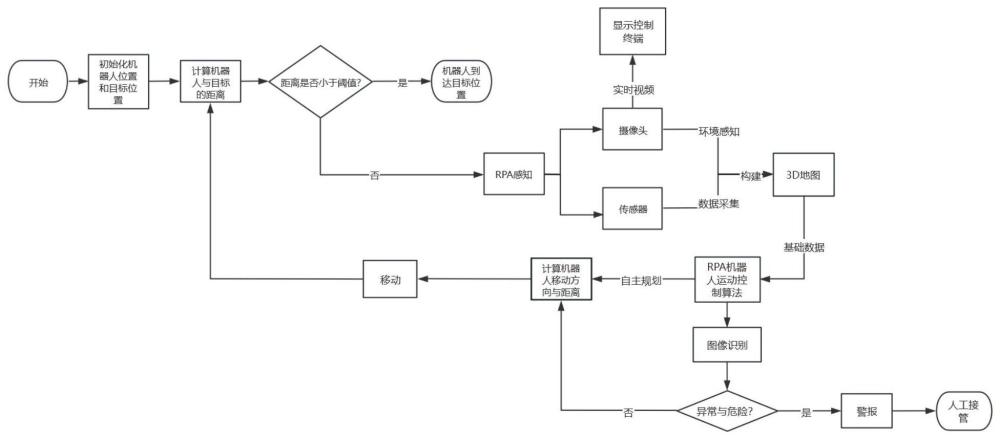
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于rpa的机器人可视化巡逻方法,用户将机器人放置在巡逻地区起点并初始化机器人位置与结束的目标位置,机器人通过rpa感知系统计算与目标之间的距离,rpa感知系统通过机器人外部安装的摄像头与传感器构建外部环境的3d地图,由rpa机器人运动控制算法自主规划机器人移动方向与距离。
3、优选地,该方法包括但不限于如下步骤:
4、s1:机器人计算目标距离是否小于阈值,在距离小于阈值时即为机器
5、人达到目标位置;
6、s2:在距离不小于阈值时通过rpa感知系统连接的摄像头与传感器分别进行环境感知与数据采集,采集后的数据用来构建3d地图;
7、s3:3d地图向rpa机器人运动控制算法提供路径基础数据,由rpa机器人运动控制算法自主规划最优移动方向与距离;
8、s4:在机器人移动后返回计算机器人与目标距离环节,以此循环;
9、优选地,摄像头与传感器进行的环境感知与数据采集包括地形、建筑物、道路等关键要素,同时摄像头采集的视频数据会实时传输至显示控制终端。
10、优选地,rpa机器人运动控制算法规划最优巡逻路径,且路径规划需考虑多种因素,如巡逻时间、覆盖范围、避障等。
11、优选地,rpa机器人运动控制算法在进行规划路径时会通过图像识别系统识别巡逻中的异常与危险。
12、优选地,在图像识别系统识别到异常与危险时会通过机器人发出警报并转入人工接管,未识别到异常与危险时会返回rpa机器人运动控制算法进行路径规划的过程。
13、与现有技术相比,本发明所达到的有益效果是:
14、第一、通过机器人搭载的高清摄像头,将巡逻区域的实时视频数据传输到控制中心,控制中心可对视频数据进行处理和分析,用户可通过可视化界面进行远程操控和监视,实现可视化巡逻,利用rpa机器人的运动控制算法,可以规划最优巡逻路径,减少了人力成本,降低了使用成本,且基于rpa的机器人可24小时不间断地进行巡逻,提高了巡逻效率。
15、第二、rpa机器人运动控制算法自动对采集的数据进行分析和处理,提取有价值的信息,通过传感器数据和图像识别技术,系统可自动识别异常情况和危险因素,减少漏报和误报。
技术特征:
1.一种基于rpa的机器人可视化巡逻方法,其特征在于:用户将机器人放置在巡逻地区起点并初始化机器人位置与结束的目标位置,机器人通过rpa感知系统计算与目标之间的距离,rpa感知系统通过机器人外部安装的摄像头与传感器构建外部环境的3d地图,由rpa机器人运动控制算法自主规划机器人移动方向与距离。
2.根据权利要求1所述的一种基于rpa的机器人可视化巡逻方法,其特征在于:该方法包括但不限于如下步骤:
3.根据权利要求1所述的一种基于rpa的机器人可视化巡逻方法,其特征在于:摄像头与传感器进行的环境感知与数据采集包括地形、建筑物、道路等关键要素,同时摄像头采集的视频数据会实时传输至显示控制终端。
4.根据权利要求1所述的一种基于rpa的机器人可视化巡逻方法,其特征在于:rpa机器人运动控制算法规划最优巡逻路径,且路径规划需考虑多种因素,如巡逻时间、覆盖范围、避障等。
5.根据权利要求1所述的一种基于rpa的机器人可视化巡逻方法,其特征在于:rpa机器人运动控制算法在进行规划路径时会通过图像识别系统识别巡逻中的异常与危险。
6.根据权利要求5所述的一种基于rpa的机器人可视化巡逻方法,其特征在于:在图像识别系统识别到异常与危险时会通过机器人发出警报并转入人工接管,未识别到异常与危险时会返回rpa机器人运动控制算法进行路径规划的过程。
技术总结
本发明涉及可视化巡逻技术领域,且公开了一种基于rpa的机器人可视化巡逻方法。该基于rpa的机器人可视化巡逻方法,包括用户将机器人放置在巡逻地区起点并初始化机器人位置与结束的目标位置,机器人通过rpa感知系统计算与目标之间的距离,由rpa机器人运动控制算法自主规划机器人移动方向与距离,通过机器人搭载的高清摄像头,将巡逻区域的实时视频数据传输到控制中心,控制中心可对视频数据进行处理和分析,用户可通过可视化界面进行远程操控和监视,实现可视化巡逻,利用rpa机器人的运动控制算法,可以规划最优巡逻路径,减少了人力成本,降低了使用成本,且基于rpa的机器人可24小时不间断地进行巡逻,提高了巡逻效率。
技术研发人员:郭亮
受保护的技术使用者:江苏风语智恒科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!