一种机器人位置交互方法及存储介质与流程
本发明涉及机器人人机交互,尤其涉及一种机器人位置交互方法及存储介质。
背景技术:
1、目前,移动机器人广泛应用在各行各业中,例如清洁机器人、医疗机器人、安防机器人、叉车机器人等,在传统部署中需要在机器端进行扫描建图、添加导航点、添加作业区域、设置各种安全区域(如隔离步梯、玻璃墙等区域),软件在变化过快三维场景适应性往往是不可预知(商场、厂区、产线等)、作业区域、安全区域易固化,难以更改。
2、在这些因素下,机器人更换三维场景之后,需要经过一系列的调试和测试,才能达到在三维场景中自行工作的效果,因此需要浪费很长的周期和人力资源。为此本发明提供一种机器人位置交互方法及存储介质。
技术实现思路
1、为克服上述在传统部署中需要在机器端进行添加导航点、添加作业区域、设置各种安全区域,软件在变化过快三维场景适应性往往是不可预知、作业区域、安全区域易固化,难以更改缺点,本发明的目的在于提供一种机器人位置交互方法及存储介质,通过利用摄像头对机器人的识别,从而测定机器人的第一坐标信息,通过基站将机器人的第一坐标信息发送至交互设备,交互设备通过机器人的第一坐标信息以及旋转矩阵,计算出机器人在三维场景中的第二坐标信息,同时利用定位芯片定位到的第三坐标信息进行比对,用以确保机器人的第二坐标信息的准确性;显示设备用于显示摄像头拍摄的画面,并提供人机交互的平台,通过在显示设备上进行对机器人的工作区域的规划,交互设备计算出工作区域在三维场景中的坐标,并通过基站发送至机器人,从而使机器人在规划的工作区域内进行工作,从而达到机器人快速部署加快交付进度、减少交付人员占用、提高人机交互的效果,通过摄像头对机器人进行实时监控,提升了机器人工作的安全性,通过提升人机交互从而提升了机器人对三维场景的适应性。
2、为了达到以上目的,本发明采用的技术方案是:一种机器人位置交互方法,应用于机器人交互系统,交互系统包括机器人、摄像头、通讯设备、交互设备、显示设备,摄像头用于拍摄图片,通讯设备包括基站和定位芯片,基站与定位芯片通过无线通讯连接,定位芯片设置于机器人,基站连接摄像头,交互设备连接基站,显示设备连接摄像头、交互设备;方法包括:
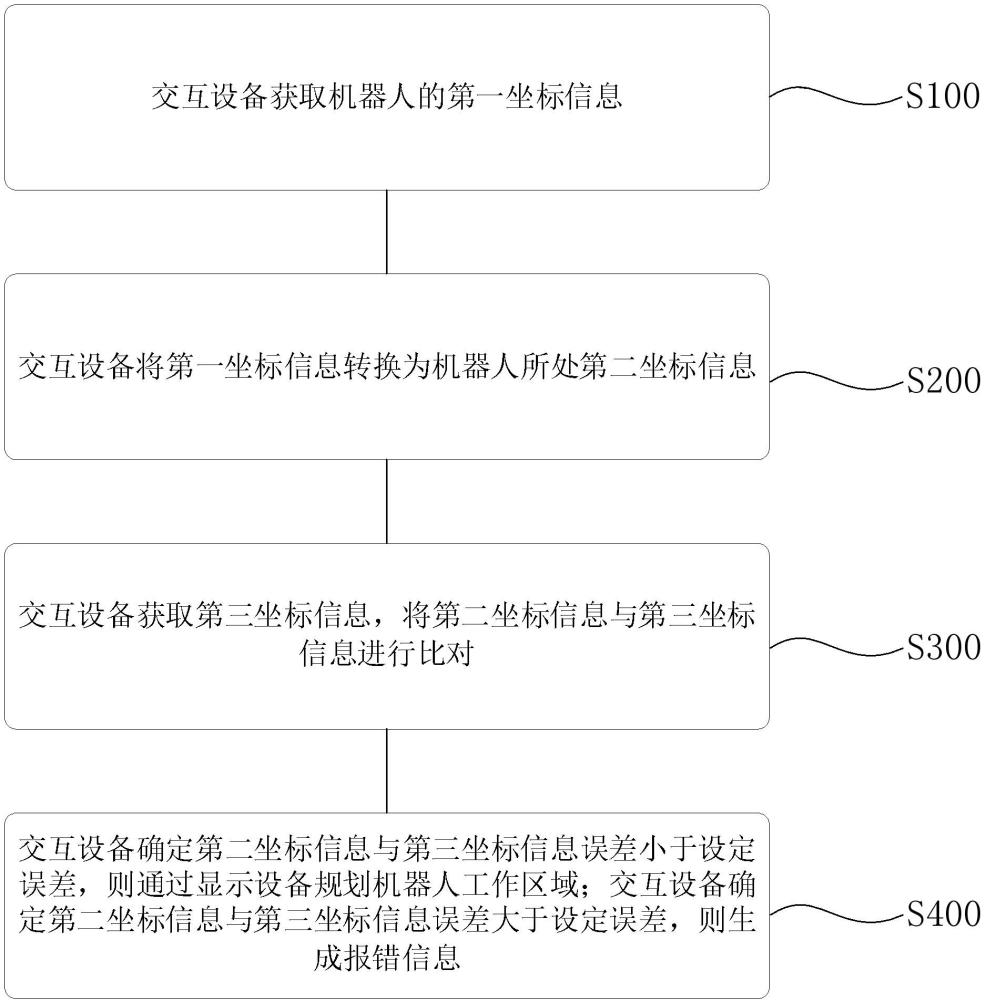
3、交互设备获取机器人的第一坐标信息,第一坐标信息为机器人在摄像头拍摄的画面中的位置信息;
4、交互设备将第一坐标信息转换为机器人所处第二坐标信息,第二坐标信息为机器人在所处的三维场景中的坐标;
5、交互设备获取第三坐标信息,将第二坐标信息与第三坐标信息进行比对,第三坐标信息为定位芯片获取的位置信息;
6、交互设备确定第二坐标信息与第三坐标信息误差小于设定误差,则通过显示设备规划机器人工作区域;交互设备确定第二坐标信息与第三坐标信息误差大于设定误差,则生成报错信息。
7、此技术方案中,机器人用于在三维场景中进行工作;摄像头识别到机器人,从而对机器人进行定位操作,获取第一坐标信息,第一坐标信息表示机器人所处摄像头拍摄画面中的坐标信息;通讯设备包括定位芯片和基站,定位芯片设置于机器人,从而可以通过定位芯片对机器人的位置进行定位,基站连接摄像头,基站用于传输信息;交互设备用于对获取的第一位置信息进行处理,将第一坐标信息转换形成第二坐标信息,从而确定机器人在三维场景中的坐标,并将第二坐标信息与第三坐标信息进行比对,确认机器人的位置是否准确,交互设备连接通讯设备的基站,便于机器人与交互设备之间进行信息交流;显示设备用于显示摄像头所拍摄的画面;
8、通过摄像头识别到与机器人出现在拍摄的画面区域当中,根据机器人在摄像头拍摄的画面当中的位置,确定机器人的第一位置信息;交互设备根据获取的第一位置信息,将第一位置信息转换为第二坐标信息,从而获取机器人在所处的三维场景中的坐标;
9、根据定位芯片的定位,获取第三坐标信息,将第二坐标信息与第三坐标信息进行比对,对机器人在所处三维场景中的坐标进行确认;
10、当确定第二坐标信息与第三坐标信息误差小于设定误差,从而确定机器人在所处三维场景中的坐标准确时,可以通过显示设备,在显示设备现实的画面中对机器人的工作区域进行规划,使机器人在划分出的工作区域中进行工作,完成人机之间的工作交互;
11、如果第二坐标信息与第三坐标信息误差大于设定误差,则表示机器人的定位出现误差,生成报错信息用以警告操作人员。
12、在一些实施方式中,交互系统还包括二维码,二维码粘贴于机器人上,其特征在于,摄像头识别到机器人包括:摄像头识别并比对二维码信息,确定机器人身份信息。
13、此技术方案中,机器人上设置有二维码,二维码绑定机器人身份信息,从而使摄像头可以从拍摄的图片中通过识别二维码的内容,从而识别出机器人;比对二维码信息,确认此二维码是绑定了机器人信息的二维码,从而确定此二维码的坐标信息可以用以代表机器人的坐标信息。
14、在一些实施方式中,交互设备获取机器人的第一坐标信息包括:
15、将摄像头拍摄的画面转换为黑白图像;
16、获取黑白图像中二维码的边缘特征;
17、根据二维码边缘特征确定二维码的角点,根据二维码的角点,确定第一坐标信息。
18、此技术方案中,黑白图片更容易识别检测图像中二维码的边缘;获取黑白图像的二维码边缘特征,可以更加便于检测出二维码的角点;通过利用二维码的角点计算出第一坐标信息。
19、在一些实施方式中,确定第一坐标信息包括:计算角点的中点值,第一坐标信息等于中点值。
20、此技术方案中,通过计算二维码四个角点的中点值,以中点值表示机器人的坐标信息,因此将中点值赋予第一坐标信息。
21、在一些实施方式中,交互设备将第一坐标信息转换为机器人所处的第二坐标信息包括:通过所述摄像头的安装位置、摄像头的拍摄方向、摄像头参数信息,构建旋转矩阵,。
22、此技术方案中,通过构建出旋转矩阵,从而可以将摄像头拍摄的平面图片中的点转换为三维场景中的点,使机器人的第一坐标信息转换为三维的第二坐标信息,同时,在对机器人的工作区域进行规划时,交互设备根据旋转矩阵将显示设备上规划出的工作区域进行转换成三维场景中对应的坐标,从而使机器人在规划的区域内进行工作。
23、在一些实施方式中,通过显示设备规划机器人工作区域包括:
24、通过显示设备划分机器人第一工作区域,第一工作区域为显示设备上的平面区域;
25、交互设备将第一工作区域转换为第二工作区域,第二工作区域为三维场景中的空间区域;
26、基站将第二工作区域信息发送至机器人。
27、此技术方案中,在显示设备上划分机器人的第一工作区域,有利于提升人机交互的效果,并可以对机器人的实时工作规划的效果;交互设备将第一工作区域转换为第二工作区域,有利于将平面的第一工作区域的坐标转换为三维的第二工作区域坐标,从而有利于机器人的辨认;将第二工作区域信息发送至机器人,有利于机器人识别命令。
28、在一些实施方式中,规划机器人工作区域包括:
29、机器人处于第二工作区域之内,则机器人在第二工作区域开始工作;
30、机器人处于第二工作区域之外,则机器人运动至第二工作区域之内,并开启工作。
31、此技术方案中,在规划机器人的工作区域,如果机器人目前所处的位置处于工作区域之外,则机器人先进去工作区域中,再进行工作;如果机器人目前所处的位置处于工作区域之中,则机器人直接进行工作。
32、在一些实施方式中,报错信息包括报错提示和重测请求。
33、此技术方案中,报错信息用于提示操作人员第一坐标信息与第二坐标信息误差过大,机器人的位置不准确;重测请求用于请求操作人员确定是否需要重新对机器人的位置信息进行重新测定
34、在一些实施方式中,重测请求包括:重新获取第一坐标信息、第二坐标信息、第三坐标信息,并将第二坐标信息和第三坐标信息进行比对。
35、此技术方案中,重新获取第一坐标信息,从而可以重新计算第二坐标信息;获取第三坐标信息,利用第二坐标信息与第三坐标信息进行比对,从而重新获取机器人的位置信息是否准确。
36、本发明提供一种存储介质,存储介质中存储有计算机程序,计算机程序在被运行时用于实现上述的方法。
37、本发明的有益效果是,通过利用摄像头对机器人的识别,从而测定机器人的第一坐标信息,通过基站将机器人的第一坐标信息发送至交互设备,交互设备通过机器人的第一坐标信息以及旋转矩阵,计算出机器人在三维场景中的第二坐标信息,同时利用定位芯片定位到的第三坐标信息进行比对,用以确保机器人的第二坐标信息的准确性;显示设备用于显示摄像头拍摄的画面,并提供人机交互的平台,通过在显示设备上进行对机器人的工作区域的规划,交互设备计算出工作区域在三维场景中的坐标,并通过基站发送至机器人,从而使机器人在规划的工作区域内进行工作,从而达到机器人快速部署加快交付进度、减少交付人员占用、提高人机交互的效果,通过摄像头对机器人进行实时监控,提升了机器人工作的安全性,通过提升人机交互从而提升了机器人对三维场景的适应性。
- 还没有人留言评论。精彩留言会获得点赞!