一种可用于钢筋自动绑扎的路径规划方法
本发明涉及建筑以及脚手架的钢筋自动绑扎,尤其涉及用于钢筋绑扎机器人的一种可用于钢筋自动绑扎的路径规划方法。
背景技术:
1、在建筑以及脚手架搭建时,为了使钢筋构成钢筋骨架,作为整体承担结构荷载,提高结构强度,需要对钢筋进行连接。
2、传统的钢筋连接方式有焊接、机械连接与绑扎,其中绑扎具有成本低、难度低的特点,是现浇结构中主要的钢筋连接方式。而人工绑扎存在诸多弊端:(1)绑扎质量难以控制;(2)绑扎效率低,影响工期,但劳动强度高;(3)目前劳动力资源非常短缺,工期要求较紧,手工绑扎不能满足需求;劳动力资源的短缺也带来了成本的大幅上升;(4)长期从事手工绑扎工作,对腕部、背部等损伤严重,职业疾病风险高。
3、钢筋绑扎机器人能实现多种工况下对钢筋交叉点的自动识别与绑扎,能提高施工速度,降低施工成本,弥补劳动力缺失。但自动绑扎则需要快速高效的绑扎路径规划算法支撑,以提供快速自动绑扎的先后顺序。
4、公开号为cn111576885a的专利文献提供的一种钢筋绑扎机器人智能绑扎施工方法及系统,依据所获得的钢筋扫描数据建立bim仿真模型,于所述bim仿真模型中设定多个初始位置,并从各初始位置开始于所述bim仿真模型中规划出对应的行走路径,且所规划得到行走路径遍历所述bim仿真模型中的所有钢筋交叉点,从多条设计行走路径中选出长度最短的一条设计路径作为行走路径。但是建立bim仿真模型,对硬件要求高,从多条设计路径中择优,绑扎时间成本高、效率低。
5、公开号为cn110328662b的专利文献提供一种基于图像识别的路径规划方法及装置,在绑扎机器人在当前方位能够识别到的钢筋绑扎区域,确定当前区域是否满足绑扎点全部被绑扎,满足则机器人前进,否则进行绑扎。在绑扎时,绑扎机器人首先会将最外层的绑扎点进行绑扎,然后再从次层绑扎点进行绑扎,直到完成全部绑扎为止。根据其提供的图示,此做法只适合单个矩形结构,至多衍生至凸多边形结构,而不适合例如有凹边的结构。对于凹边的结构,技术方案总是需要计算识别率,以识别区域内已绑扎点的数量与所有绑扎点的数量之比,据此判断是否完成当前区域,造成了不必要的算力浪费,降低了绑扎的速度和效率。
6、公开号为cn116151036b的专利文献提供一种钢筋自动绑扎的路径规划方法及装置,需要扫描视野内的交叉点,当交叉点在图像尺寸下较稀疏时,造成了不必要的算力浪费,降低了绑扎的速度和效率。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种可用于钢筋自动绑扎的路径规划方法,其解决了因规划路径中存在无法识别的绑扎点或未绑扎点时,需对钢筋交叉点进行反复检查、反复识别的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明提供一种可用于钢筋自动绑扎的路径规划方法,包括以下步骤:
5、根据钢筋交叉点的坐标位置,推算点阵的全部角节点;包括:计算每个交叉点像素坐标值x和y的“x乘y”和“y除以x”值,找出矩形点阵的初始四角节点,包括:“y除以x”最大者作为p1点,“y除以x”最小者作为p3点,“x乘y”最大者作为p2点,“x乘y”最小者作为p4点,特殊情况下结果不唯一的,随机挑选一个。
6、所述角节点是点阵的最外侧节点。
7、计算任意两个交叉点在像素坐标系下的欧氏距离,并将其最小值dmin乘以0.9,作为搜索半径r。
8、r=dmin×0.9(1)
9、所述搜索半径是实时计算出来的,小于任意两个交叉点在像素坐标系下的欧氏距离的最小值。
10、执行角节点检查与校准,包括:若p1与p4的x值之差大于搜索半径r,使用p1和p4的x值中较小者,并将其直接赋值给另一个;若p2与p3的x值之差大于搜索半径r,使用p2和p3的x值中较大者,并将其直接赋值给另一个;若p1与p2的y值之差大于搜索半径r,使用p1和p2的y值中较大者,并将其直接赋值给另一个;若p3与p4的y值之差大于搜索半径r,使用p3和p4的y值中较小者,并将其直接赋值给另一个。
11、分别计算每个交叉点到由4个角节点构成的4条边的距离值,当距离值小于搜索半径r时,视该交叉点隶属于该边,然后对于对边取最大值作为预测矩形点阵形状的依据,例如,对于一对对边,其中一个边拥有4个隶属点,另一个边有3个隶属点,取最大值4来估计形状,例如,预测点阵可能的形状是n×4,n由另一对对边的情况确定。
12、根据预测的矩形点阵角节点和预测的矩形点阵形状,计算预测矩形点阵中每个节点的位置;计算实际交叉点到预测矩形点阵中节点的距离,依次确定交叉点与预测点的对应关系,如果距离小于搜索半径r,则将交叉点添加到路径规划结果中,全部完成时获得规划的路径。
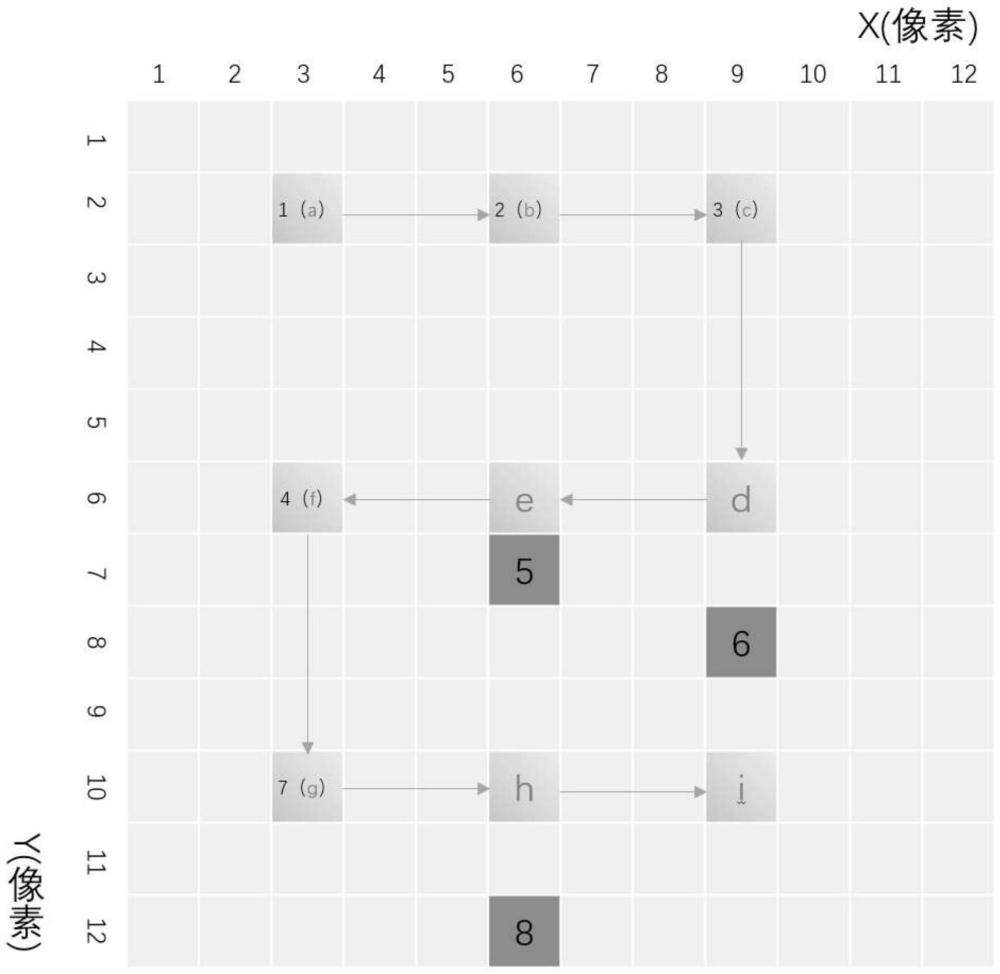
13、本发明实施例提出的可用于钢筋自动绑扎的路径规划方法,通过预测标准点阵位置,寻找最近交叉点,可以在图形畸变环境下进行s形路径规划,在规划路径中存在无法识别的绑扎点或未绑扎点时,无需对钢筋交叉点进行反复检查、反复识别,可生成已识别的绑扎点进行最短路径规划,提高钢筋自动绑扎的效率。
14、(三)有益效果
15、本发明的有益效果是:本发明的可用于钢筋自动绑扎的路径规划方法,由于预测了标准矩形点阵,在规划路径中存在无法识别的绑扎点或未绑扎点时,无需对钢筋交叉点进行反复检查、反复识别,相对于现有技术而言,其可以提高扫描以及路径规划的效率。
技术特征:
1.一种可用于钢筋自动绑扎的路径规划方法,其特征在于,包括以下步骤:
技术总结
本发明涉及一种可用于钢筋自动绑扎的路径规划方法,属于建筑以及脚手架的钢筋自动绑扎技术领域,其中,该方法包括步骤:确定搜索半径,生成预测点阵,根据预测点阵完成s形路径规划。本发明通过对标准点阵位置的推算实现在存在未识别的绑扎点与图像畸变的情况下,规划出钢筋自动绑扎机构的最优路径,提高了绑扎效率。
技术研发人员:缪鹍,戴炎林
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!