一种基于机械手的转运设备的制作方法
本发明涉及机械手,尤其涉及一种基于机械手的转运设备。
背景技术:
1、现有的机械手在转运料件的时候都是通过夹爪的方式来对物件进行抓取,抓取效率低,且不能满足批量抓取的要求。
技术实现思路
1、本发明的目的在于提供一种基于机械手的转运设备,以解决上述技术问题。
2、为实现上述目的,本发明提供如下技术方案,
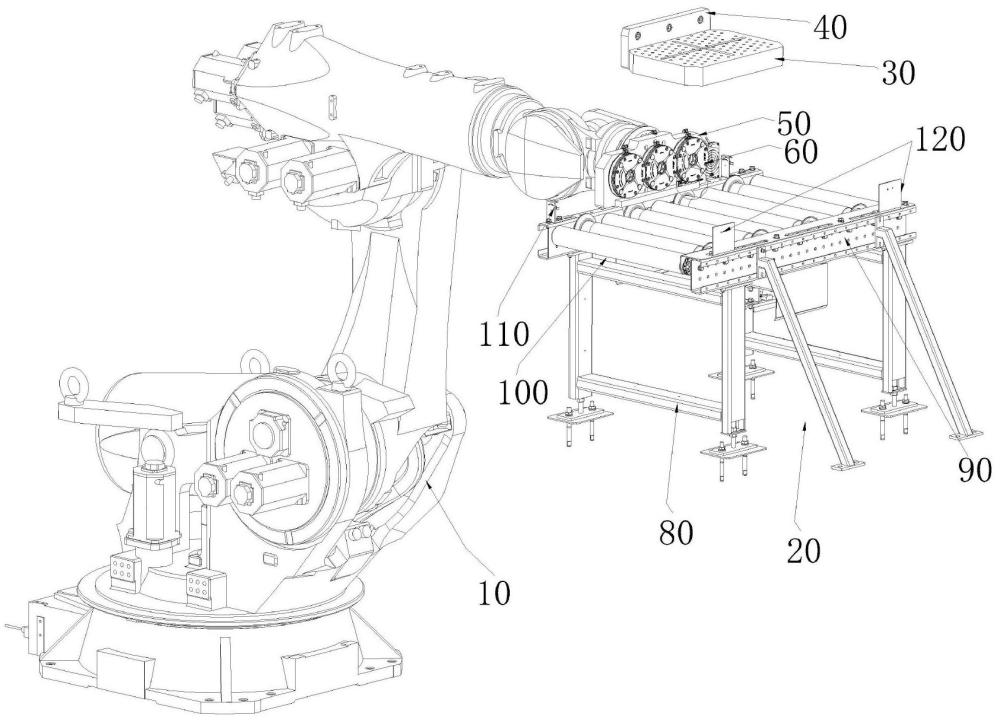
3、一种基于机械手的转运设备,其特征在于,包括抓料机械手、运输料件的运输机构以及设置在运输机构上的物料托盘,所述物料托盘的一侧设置有与物料托盘固定连接的连接板,所述抓料机械手上设置有安装板,所述安装板上设置有多个零点定位器,所述连接板朝向零点定位器的一侧上设置有拉钉,所述零点定位器的中心设置有开孔用于与拉钉配合,实现对连接板的抓取从而转运物料托盘上的物料。
4、本发明进一步设置,所述运输结构包括机架、固定在机架两侧的固定板,所述固定板的之间分布有转动辊,所述转动辊之间通过链传动的方式实现联动。
5、本发明进一步设置,靠近所述抓料机械手的一侧的所述固定板上设置有光伏传感器,用于检测物料托盘,所述光伏传感器位于固定板的两端,相对应的远离所述抓料机械手的一侧固定板上设置有反光板,所述光伏传感器与反光板配合实现对物料托盘的检测。
6、本发明进一步设置,所述零点定位器设置在定位器安装板上,所述定位器安装板与抓料机械手固定连接,所述定位器安装板上设置有检测连接板的面传感器。
7、本发明进一步设置,所述零点定位器设置有至少3个,并排设置在定位器安装板上。
8、本发明的有益效果:本发明中在抓取物料采用零点定位器,并配合拉钉,将拉钉设置在连接板上,连接板连接物料托盘,物料可多个放置在物料托盘上,从而能够实现对物料的整体搬运,工作效率有显著的提升。
技术特征:
1.一种基于机械手的转运设备,其特征在于,包括抓料机械手、运输料件的运输机构以及设置在运输机构上的物料托盘,所述物料托盘的一侧设置有与物料托盘固定连接的连接板,所述抓料机械手上设置有安装板,所述安装板上设置有多个零点定位器,所述连接板朝向零点定位器的一侧上设置有拉钉,所述零点定位器的中心设置有开孔用于与拉钉配合,实现对连接板的抓取从而转运物料托盘上的物料。
2.如权利要求1所述的一种基于机械手的转运设备,其特征在于,所述运输结构包括机架、固定在机架两侧的固定板,所述固定板的之间分布有转动辊,所述转动辊之间通过链传动的方式实现联动。
3.如权利要求2所述的一种基于机械手的转运设备,其特征在于,靠近所述抓料机械手的一侧的所述固定板上设置有光伏传感器,用于检测物料托盘,所述光伏传感器位于固定板的两端,相对应的远离所述抓料机械手的一侧固定板上设置有反光板,所述光伏传感器与反光板配合实现对物料托盘的检测。
4.如权利要求1所述的一种基于机械手的转运设备,其特征在于,所述零点定位器均匀设置在安装板上,所述安装板与抓料机械手固定连接,所述安装板上设置有检测连接板的面传感器。
5.如权利要求4所述的一种基于机械手的转运设备,其特征在于,所述零点定位器设置有至少3个,并排设置在定位器安装板上。
技术总结
本发明为一种基于机械手的转运设备,其特征在于,包括抓料机械手、运输料件的运输机构以及设置在运输机构上的物料托盘,所述物料托盘的一侧设置有与物料托盘固定连接的连接板,所述抓料机械手上设置有安装板,所述安装板上设置有多个零点定位器,所述连接板朝向零点定位器的一侧上设置有拉钉,所述零点定位器的中心设置有开孔用于与拉钉配合,实现对连接板的抓取从而转运物料托盘上的物料。本发明中在抓取物料采用零点定位器,并配合拉钉,将拉钉设置在连接板上,连接板连接物料托盘,物料可多个放置在物料托盘上,从而能够实现对物料的整体搬运,工作效率有显著的提升。
技术研发人员:邓华伟,吴俊强,刘付钦,张奕晨,张时宇,肖勇
受保护的技术使用者:宁波智能成型技术创新中心有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!