用于洁净机器人设备的示教方法、示教器、系统和介质与流程
本发明涉及半导体生产领域,尤其涉及一种用于洁净机器人设备的示教方法、示教器、系统和介质。
背景技术:
1、半导体生产行业中,洁净机器人设备用于在半导体生产线上的洁净室内进行各种操作,如搬运、传输、定位和装配等。采用示教器对洁净机器人设备调试和示教。现有技术根据洁净机器人设备配置固定程序,以达到监控、调试、使用的作用。
2、对于生产人员来说,设备生产模式采用的是并行生产,同时生产多种型号的设备,进度不同时对于示教器的使用进度也不一致,因为示教器与设备采用一对一匹配方式,当设备因为工期、零配件、检修等原因提前或滞后时,示教器的示教效果就存在与实际需求不匹配的现象。当示教器使用出现异常,设备需要新需求,示教器软件更新不及时,就需要根据每台设备的不同情况针对性更新,费时且易错,不利于提升生产效率。因此,亟需一种新型的用于洁净机器人设备的示教方法、示教器、系统和介质以改善上述问题。
技术实现思路
1、本发明的目的在于提供一种用于洁净机器人设备的示教方法、示教器、系统和介质,该方法用于提升对洁净机器人设备示教的效率。
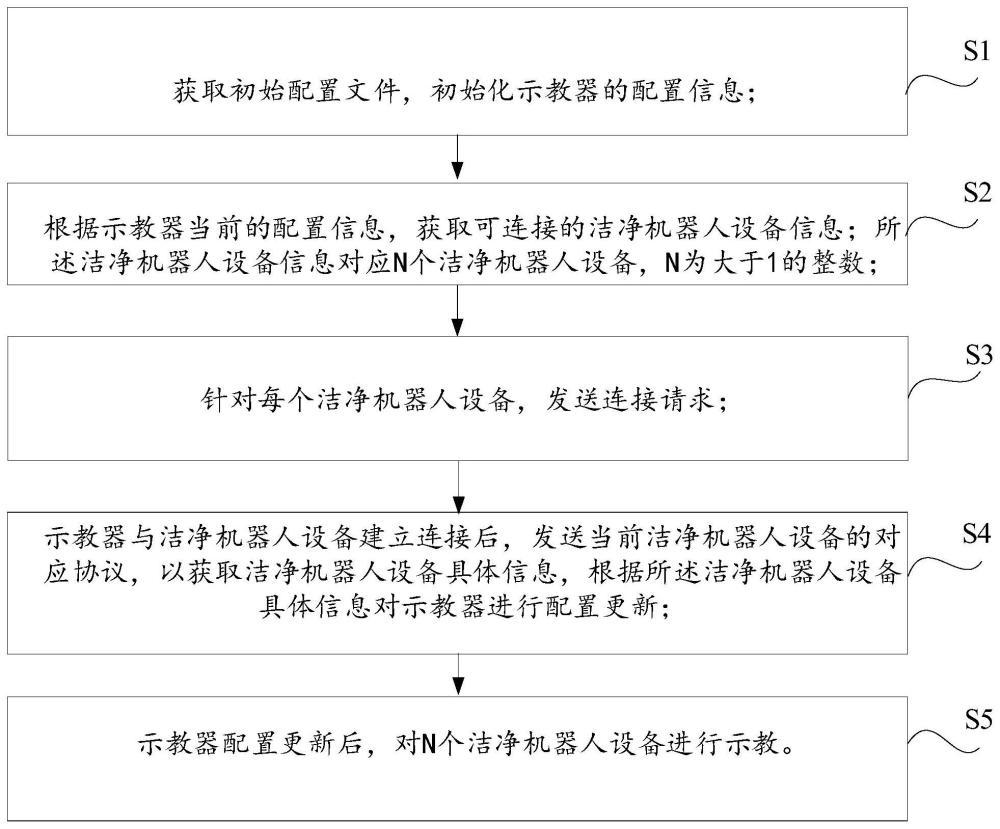
2、第一方面,本发明提供一种用于洁净机器人设备的示教方法,包括:s1,获取初始配置文件,初始化示教器的配置信息;s2,根据示教器当前的配置信息,获取可连接的洁净机器人设备信息;所述洁净机器人设备信息对应n个洁净机器人设备,n为大于1的整数;s3,针对每个洁净机器人设备,发送连接请求;s4,示教器与洁净机器人设备建立连接后,发送当前洁净机器人设备的对应协议,以获取洁净机器人设备具体信息,根据所述洁净机器人设备具体信息对示教器进行配置更新;s5,示教器配置更新后,对n个洁净机器人设备进行示教。
3、本发明的有益效果为:本发明根据示教器当前的配置信息,获取可连接的洁净机器人设备信息;所述洁净机器人设备信息对应n个洁净机器人设备;针对每个洁净机器人设备,发送连接请求;示教器与洁净机器人设备建立连接后,发送当前洁净机器人设备的对应协议,以获取洁净机器人设备具体信息,根据所述洁净机器人设备具体信息对示教器进行配置更新。本发明便于多个洁净机器人设备同时进行示教,有利于节约调试时间,提升洁净机器人设备的调试效率和生产效率。
4、可选的,所述初始化示教器的配置信息前,还包括:执行配置示教器的自启动互联网协议(internet protocol,ip)地址、设定示教器启动后应执行的文件名称、设定文件版本、开启洁净机器人设备灯光和建立服务器连接中的至少一种。其有益效果在于,通过初始化示教器的配置信息便于示教器在启动后自动运行所需各版本的文件,同时通过开启洁净机器人设备灯光反馈洁净机器人设备的工作状态,通过建立服务器连接便于后续对洁净机器人设备的示教操作。
5、可选的,所述洁净机器人设备信息包括:洁净机器人设备适配的网络类型、洁净机器人设备地址和端口(port)号;所述网络类型满足传输控制协议(transmission controlprotocol,tcp)、用户数据报协议(user datagram protocol,udp)、超文本传输协议(hypertext transfer protocol,http)、文件传输协议(file transfer protocol,ftp)、网络电传(teletype over the network,telnet)、简单邮件传输协议(simple mailtransfer protocol,smtp)和网络文件系统(network file system,nfs)中的至少一种;n个洁净机器人设备的信息各不相同。其有益效果在于,选择适配的网络类型,便于示教器与洁净机器人设备通信,避免网络类型不兼容导致的通信故障。
6、可选的,当前洁净机器人设备包含摄像头时,所述可连接的洁净机器人设备信息还包括:曝光时间、白平衡值和焦距值中的至少一种;当前洁净机器人设备包含机械手时,所述可连接的洁净机器人设备信息还包括:运动速度值、运动角度值和传感器参数中的至少一种。
7、可选的,所述根据所述洁净机器人设备具体信息对示教器进行配置更新,包括:根据所述洁净机器人设备具体信息,加载对应n个洁净机器人设备的用户界面(userinterface,ui);所述用户界面用于显示在示教器的输出端。
8、可选的,所述s5执行后,还包括:s6,记录每个洁净机器人设备的示教参数,所述示教参数用作当前洁净机器人设备在二次示教时的默认参数。
9、第二方面,本发明提供一种示教器,用于所述第一方面中任一项所述的方法,包括:存储单元,用于获取初始配置文件,初始化示教器的配置信息;根据示教器当前的配置信息,获取可连接的洁净机器人设备信息;所述洁净机器人设备信息对应n个洁净机器人设备,n为大于1的整数;通信单元,用于针对每个洁净机器人设备,发送连接请求;示教器与洁净机器人设备建立连接后,发送当前洁净机器人设备的对应协议,以获取洁净机器人设备具体信息;处理单元,用于根据所述洁净机器人设备具体信息对示教器进行配置更新;示教器配置更新后,对n个洁净机器人设备进行示教。
10、可选的,所述处理单元还用于执行配置示教器的自启动互联网协议地址、设定示教器启动后应执行的文件名称、设定文件版本、开启洁净机器人设备灯光和建立服务器连接中的至少一种。
11、第三方面,本发明提供一种示教系统,包括示教器和n个洁净机器人设备;所述示教器包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的程序,当所述程序被所述处理器执行时,使得所述电洁净机器人设备实现第一方面中任一项所述的方法。
12、第四方面,本发明提供一种可读存储介质,所述可读存储介质内存储有程序,所述程序被执行时,实现第一方面中任一项所述的方法。
技术特征:
1.一种用于洁净机器人设备的示教方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述初始化示教器的配置信息前,还包括:
3.根据权利要求1或2所述的方法,其特征在于,所述洁净机器人设备信息包括:
4.根据权利要求3所述的方法,其特征在于,当前洁净机器人设备包含摄像头时,所述可连接的洁净机器人设备信息还包括:曝光时间、白平衡值和焦距值中的至少一种;当前洁净机器人设备包含机械手时,所述可连接的洁净机器人设备信息还包括:运动速度值、运动角度值和传感器参数中的至少一种。
5.根据权利要求1或2所述的方法,其特征在于,所述根据所述洁净机器人设备具体信息对示教器进行配置更新,包括:
6.根据权利要求1或2所述的方法,其特征在于,所述s5执行后,还包括:
7.一种示教器,用于所述权利要求1至6中任一项所述的方法,其特征在于,包括:
8.根据权利要求7所述的示教器,其特征在于,所述处理单元还用于执行配置示教器的自启动互联网协议地址、设定示教器启动后应执行的文件名称、设定文件版本、开启洁净机器人设备灯光和建立服务器连接中的至少一种。
9.一种示教系统,其特征在于,包括示教器和n个洁净机器人设备;
10.一种可读存储介质,所述可读存储介质内存储有程序,其特征在于,所述程序被执行时,实现权利要求1至6中任一项所述的方法。
技术总结
本发明涉及半导体生产领域,提供一种用于洁净机器人设备的示教方法、示教器、系统和介质,该方法包括:S1,获取初始配置文件,初始化示教器的配置信息;S2,根据示教器当前的配置信息,获取可连接的洁净机器人设备信息;所述洁净机器人设备信息对应N个洁净机器人设备,N为大于1的整数;S3,针对每个洁净机器人设备,发送连接请求;S4,示教器与洁净机器人设备建立连接后,发送当前洁净机器人设备的对应协议,以获取洁净机器人设备具体信息,根据所述洁净机器人设备具体信息对示教器进行配置更新;S5,示教器配置更新后,对N个洁净机器人设备进行示教。该方法用于提升对洁净机器人设备示教的效率。
技术研发人员:朱玉东,何海龙,高路为,莫涵
受保护的技术使用者:中科芯微智能装备(沈阳)有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!