一种巡检机器人
本技术涉及安防,尤其是一种巡检机器人。
背景技术:
1、安防行业是随着现代社会安全需求应运而生的产业,纵观安防行业发展历程,主要是围绕着视频监控在不断改革升级,至今共经历过五次变革,“看得到、看得远、看得清”一直是推动行业进步的主要因素,随着科技的不断发展,智能安防行业进入快速落地阶段,随着自动驾驶技术相关产业链发展,安防巡检机器人产品得到普遍的运用。
2、现有的一些厂区安防巡检机器人在使用时存在一定的弊端,整体结构较为复杂,不便于操作,智能效果较差,不便于智能机器人对厂区的安防巡检工作,为此,我们提出一种巡检机器人解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种巡检机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
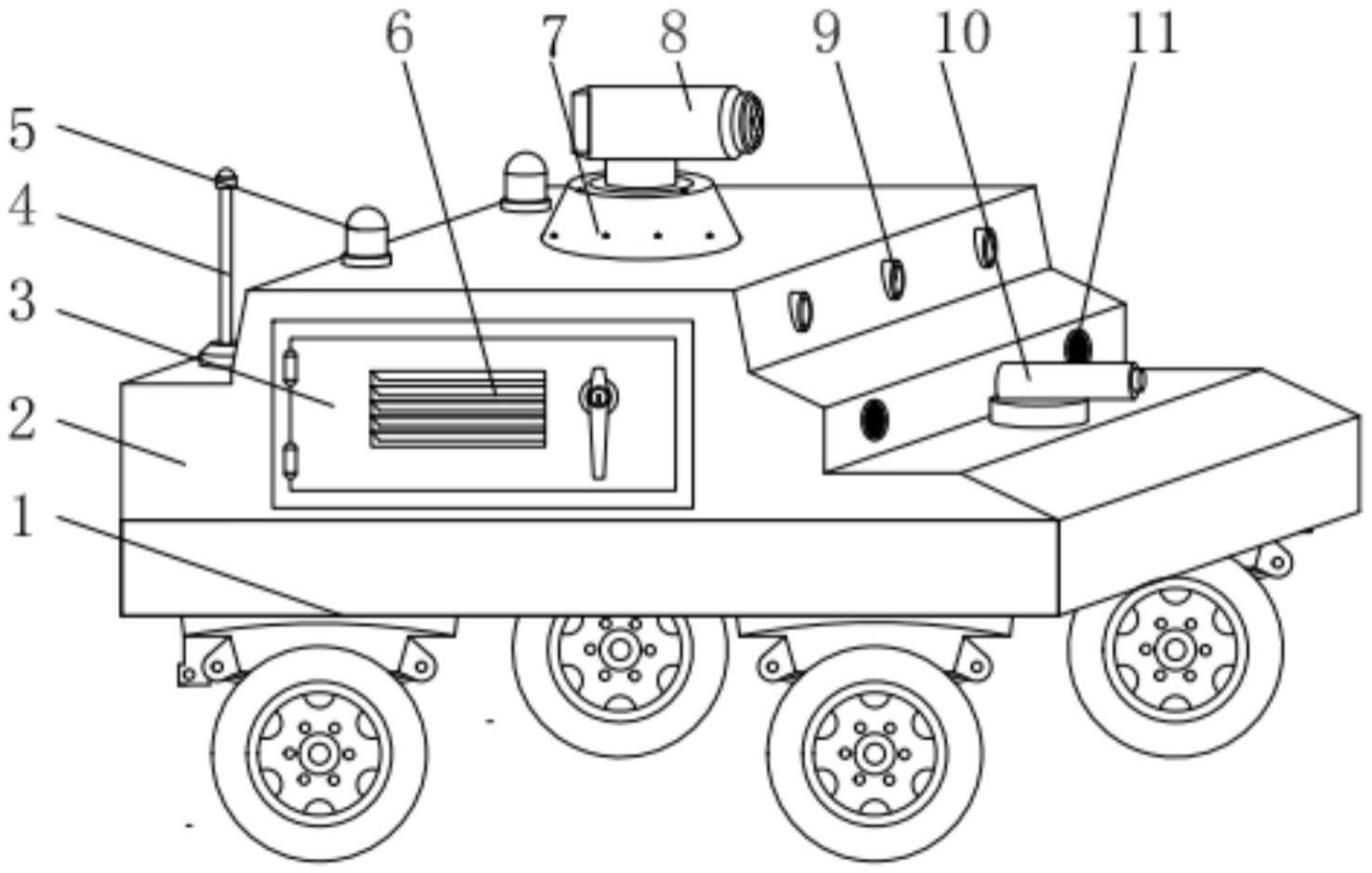
3、一种巡检机器人,包括四驱动力车和电脑控制终端,所述四驱动力车的上表面固定连接有机壳,所述机壳的上表面固定连接有锥形座,所述锥形座的上表面固定镶嵌有密封轴承,所述密封轴承的内圈固定连接有支撑柱,所述支撑柱的顶端固定连接有监控摄像头,所述监控摄像头的上表面固定连接有两个支撑杆,两个所述支撑杆的顶端共同固定连接有遮雨板,所述机壳的内顶壁固定连接有减速器,所述减速器的输入端固定连接有伺服电机,所述减速器的输出端贯穿机壳并与支撑柱的底端固定连接,所述机壳的上表面固定连接有激光测距仪和信号杆,所述机壳的内部设有控制箱,所述控制箱的内部设有中央处理器模块、定位导航模块和nb-lot5g模块,所述中央处理器模块通过导线与监控摄像头电性连接,所述中央处理器模块通过导线与定位导航模块电性连接,所述中央处理器模块通过导线与激光测距仪电性连接,所述中央处理器模块通过导线与信号杆电性连接,所述控制箱通过无线网与电脑控制终端无线连接。
4、在进一步的实施例中,所述机壳的正面通过两个合页铰接有防护门,所述防护门的正面固定镶嵌有散热窗。
5、在进一步的实施例中,所述机壳的背面固定镶嵌有吹风机,所述吹风机的背面固定连接有防尘网。
6、在进一步的实施例中,所述机壳的右侧面固定连接有一组照明灯,所述机壳的上表面固定连接有一组警闪灯。
7、在进一步的实施例中,所述机壳的右侧面固定镶嵌有一组语音器,所述语音器位于激光测距仪的前后两端。
8、在进一步的实施例中,所述四驱动力车的右端固定连接有防撞条,所述防撞条为橡胶材质。
9、与现有技术相比,本实用新型的有益效果是:
10、本装置通过设置的nb-lot5g模块可以为巡检机器人提供网络无线信号,便于数据的传输,通过设置的监控摄像头和定位导航模块可以对巡检机器人进行位置精准定位和厂区周边环境的监测,并通过设置的电脑控制终端、中央处理器模块和信号杆的配合,实现巡检机器人的远程巡航监控,此装置结构简单,易于操作,实用性较强。
技术特征:
1.一种巡检机器人,其特征在于:包括四驱动力车(1)和电脑控制终端(24),所述四驱动力车(1)的上表面固定连接有机壳(2),所述机壳(2)的上表面固定连接有锥形座(7),所述锥形座(7)的上表面固定镶嵌有密封轴承(17),所述密封轴承(17)的内圈固定连接有支撑柱(18),所述支撑柱(18)的顶端固定连接有监控摄像头(8),所述监控摄像头(8)的上表面固定连接有两个支撑杆(19),两个所述支撑杆(19)的顶端共同固定连接有遮雨板(12),所述机壳(2)的内顶壁固定连接有减速器(21),所述减速器(21)的输入端固定连接有伺服电机(20),所述减速器(21)的输出端贯穿机壳(2)并与支撑柱(18)的底端固定连接,所述机壳(2)的上表面固定连接有激光测距仪(10)和信号杆(4),所述机壳(2)的内部设有控制箱(14),所述控制箱(14)的内部设有中央处理器模块(25)、定位导航模块(22)和nb-lot5g模块(23),所述中央处理器模块(25)通过导线与监控摄像头(8)电性连接,所述中央处理器模块(25)通过导线与定位导航模块(22)电性连接,所述中央处理器模块(25)通过导线与激光测距仪(10)电性连接,所述中央处理器模块(25)通过导线与信号杆(4)电性连接,所述控制箱(14)通过无线网与电脑控制终端(24)无线连接。
2.根据权利要求1所述的一种巡检机器人,其特征在于:所述机壳(2)的正面通过两个合页铰接有防护门(3),所述防护门(3)的正面固定镶嵌有散热窗(6)。
3.根据权利要求1所述的一种巡检机器人,其特征在于:所述机壳(2)的背面固定镶嵌有吹风机(16),所述吹风机(16)的背面固定连接有防尘网(15)。
4.根据权利要求1所述的一种巡检机器人,其特征在于:所述机壳(2)的右侧面固定连接有一组照明灯(9),所述机壳(2)的上表面固定连接有一组警闪灯(5)。
5.根据权利要求1所述的一种巡检机器人,其特征在于:所述机壳(2)的右侧面固定镶嵌有一组语音器(11),所述语音器(11)位于激光测距仪(10)的前后两端。
6.根据权利要求1所述的一种巡检机器人,其特征在于:所述四驱动力车(1)的右端固定连接有防撞条(13),所述防撞条(13)为橡胶材质。
技术总结
本技术公开了一种巡检机器人,包括四驱动力车和电脑控制终端,所述四驱动力车的上表面固定连接有机壳,所述机壳的上表面固定连接有锥形座,所述锥形座的上表面固定镶嵌有密封轴承,所述密封轴承的内圈固定连接有支撑柱,所述支撑柱的顶端固定连接有监控摄像头,所述监控摄像头的上表面固定连接有两个支撑杆。本装置通过设置的NB‑LOT5G模块可以为巡检机器人提供网络无线信号,便于数据的传输,通过设置的监控摄像头和定位导航模块可以对巡检机器人进行位置精准定位和厂区周边环境的监测,并通过设置的电脑控制终端、中央处理器模块和信号杆的配合,实现巡检机器人的远程巡航监控,此装置结构简单,易于操作,实用性较强。
技术研发人员:葛君朋
受保护的技术使用者:山东工业职业学院
技术研发日:20230128
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!