一种用于圆环抓手的可调手指结构的制作方法
本技术涉及机械装夹领域,具体涉及一种用于圆环抓手的可调手指结构。
背景技术:
1、目前,圆环抓手一般是把多个l型的杆放在圆形工件的下面,多个l型的杆呈圆周排列,对圆环工件进行抓取,这种传统的抓取方式不能灵活抓取直径不同的圆环工件,且手指承力能力差,不能对圆环工件进行翻面操作。
技术实现思路
1、本实用新型的目的在于提供一种用于圆环抓手的可调手指结构,以解决现有技术中的装夹承受能力差和不能灵活抓取的技术问题。
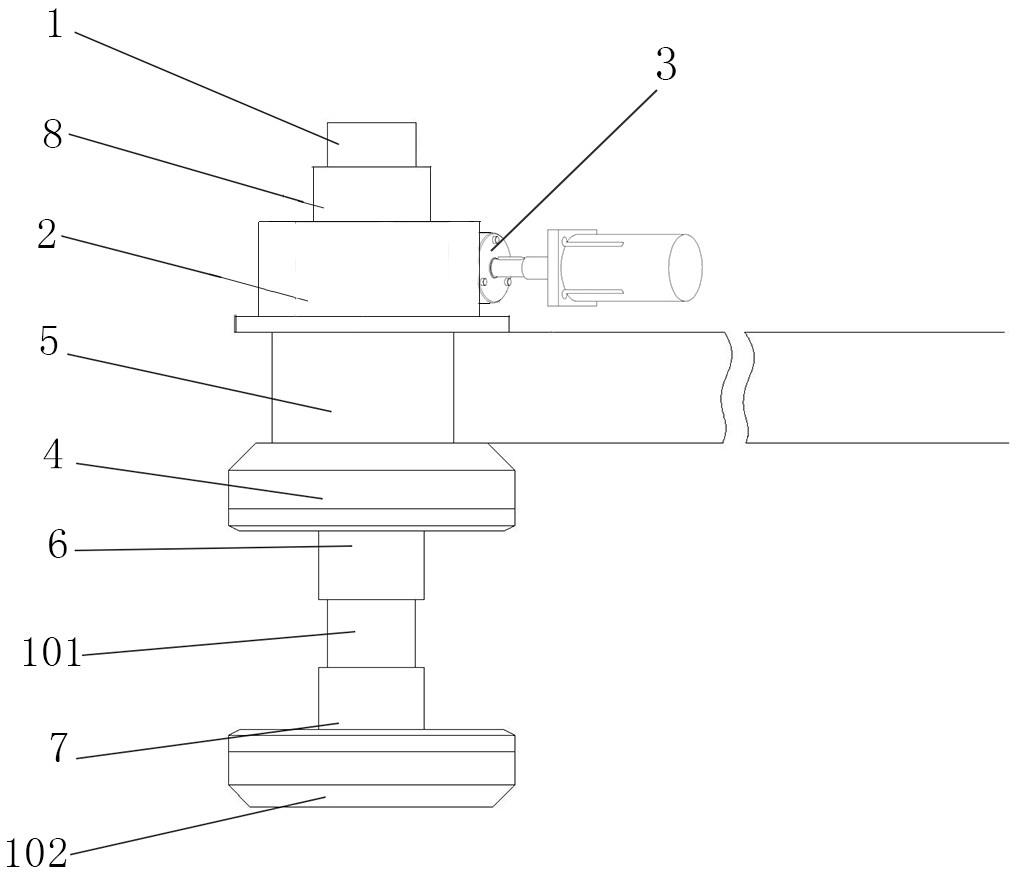
2、为实现上述目的,本实用新型提供了一种用于圆环抓手的可调手指结构,包括升降座、调节蜗轮组件、减速蜗杆组件、压块和旋转臂,所述升降座上套设有调节蜗轮组件、压块和旋转臂,升降座是由升降杆和锁紧盘组成,升降杆的上端开设有外螺纹,调节蜗轮组件通过与升降杆通过螺纹进行活动连接;调节蜗轮组件的径向连接有减速蜗杆组件,旋转臂的上端抵接调节蜗轮组件,旋转臂的下端连接有压块。
3、进一步的,升降座上还套设有上压套和下压套,上压套和下压套为t型导套,上压套和下压套设置在压块和锁紧盘中间位置,上压套与压块的下端面连接,下压套与锁紧盘的上端面连接。
4、进一步的,调节蜗轮组件的上端安装有传感器,传感器为环形结构,传感器内插入升降杆。
5、进一步的,旋转臂的上端面与调节蜗轮组件抵接,旋转臂的下端与压块固定。
6、进一步的,旋转臂为弧形结构,旋转臂的外端设置升降座,旋转臂的首端连接回转驱动件。
7、进一步的,减速蜗杆组件的底座安装在旋转臂的上端面。
8、基于上述技术方案,本实用新型可以产生如下有益效果:
9、本实用新型提供的一种用于圆环抓手的可调手指结构,能够适应多种圆环的直径、厚度及截面外形,能灵活调节和抓取不同直径大小的圆环工件,结构简单,操作方便,抓取稳定,安全性高。
技术特征:
1.一种用于圆环抓手的可调手指结构,其特征在于,包括升降座(1)、调节蜗轮组件(2)、减速蜗杆组件(3)、压块(4)和旋转臂(5),所述升降座(1)上套设有调节蜗轮组件(2)、压块(4)和旋转臂(5),升降座(1)是由升降杆(101)和锁紧盘(102)组成,升降杆(101)的上端开设有外螺纹,调节蜗轮组件(2)通过与升降杆(101)通过螺纹进行活动连接;调节蜗轮组件(2)的径向连接有减速蜗杆组件(3),旋转臂(5)的上端抵接调节蜗轮组件(2),旋转臂(5)的下端连接有压块(4)。
2.根据权利要求1所述的一种用于圆环抓手的可调手指结构,其特征在于,所述升降座(1)上还套设有上压套(6)和下压套(7),上压套(6)和下压套(7)为t型导套,上压套(6)和下压套(7)设置在压块(4)和锁紧盘(102)中间位置,上压套(6)与压块(4)的下端面连接,下压套(7)与锁紧盘(102)的上端面连接。
3.根据权利要求1所述的一种用于圆环抓手的可调手指结构,其特征在于,所述调节蜗轮组件(2)的上端安装有传感器(8),传感器(8)为环形结构,传感器(8)内插入升降杆(101)。
4.根据权利要求1所述的一种用于圆环抓手的可调手指结构,其特征在于,所述旋转臂(5)的上端面与调节蜗轮组件(2)抵接,旋转臂(5)的下端与压块(4)固定。
5.根据权利要求1所述的一种用于圆环抓手的可调手指结构,其特征在于,所述旋转臂(5)为弧形结构,旋转臂(5)的外端设置升降座(1),旋转臂(5)的首端连接回转驱动件(9)。
6.根据权利要求1所述的一种用于圆环抓手的可调手指结构,其特征在于,所述减速蜗杆组件(3)的底座安装在旋转臂(5)的上端面。
技术总结
本技术公开了一种用于圆环抓手的可调手指结构,包括升降座、调节蜗轮组件、减速蜗杆组件、压块和旋转臂,所述升降座上套设有调节蜗轮组件、压块和旋转臂,升降座是由升降杆和锁紧盘组成,升降杆的上端开设有外螺纹,调节蜗轮组件通过与升降杆通过螺纹进行活动连接;调节蜗轮组件的径向连接有减速蜗杆组件,旋转臂的上端抵接调节蜗轮组件,旋转臂的下端连接有压块。本技术通过用于圆环抓手的可调手指结构解决了现有技术中的装夹承受能力差和不能灵活抓取的技术问题。
技术研发人员:张光宇,李向东
受保护的技术使用者:成都九系机器人科技有限公司
技术研发日:20230616
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!