一种具有减震效果的巡检机器人的制作方法
本技术涉及安防巡检,具体为一种具有减震效果的巡检机器人。
背景技术:
1、安防巡检是当今社会人类生产、生活中必不可少的技术。尤其对于工业生产,安全是最为重要的因素之一。工业生产过程中需要采取各种方式来保障安全的生产,目前很多企业采用人工巡检的方式进行安全检查,但人工巡检的方式,不仅工作量较大,而且效率不高。采用机器人进行智能巡检的技术日益普及,例如在电力、轨道交通等应用场景。但现有的机器人进行工厂巡检时,尤其是在不同的生产环境进行巡检工作时,由于总是存在路面不平,坑坑洼洼的情况,使机器人在进行巡检时,由于行进中的颠簸导致摄像头拍摄的画面抖动,影响视觉识别的效果,有些情况下会导致无法及时发现安全隐患;同时存在稳定性降低,破坏结构稳定性,从而降低使用寿命,降低工作效率。
2、中国实用新型专利《一种减震效果好的地面轮式巡检机器人》采用弹簧作为减震缓冲装置,虽然成本较低而且在一定程度上可以起到减震缓冲效果,但是单纯使用弹簧容易产生回弹。中国实用新型专利《一种智慧工地巡检机器人》通过弹簧、铁锤和拉力绳组成减震装置,可以起到一定的减震效果,但是减震效果有限,仅适用于较为平坦的路面并且并非用于摄像监控的场景。
技术实现思路
1、鉴于现有技术中所存在的问题,本实用新型公开了一种具有减震效果的巡检机器人,采用的技术方案是,包括传动机构,所述传动机构上端设有减震机构三,所述减震机构三上端设有安装平台,所述安装平台上端设有摄像检查机构,所述传动机构之间设有车架,所述车架上设有电机,所述电机输出轴贯穿保护壳连接锥齿轮。
2、优选地,所述传动机构包括两侧车轮,车轮内设有安装轴,所述安装轴间设有传动轴、保护壳,且传动轴设置在保护壳内,所述传动轴间设有差速器,且差速器一侧传动轴上设有锥齿轮。
3、优选地,所述减震机构三设置在安装轴上,所述减震机构三包括叉臂、减震阻尼器、支撑柱,且叉臂通过铰链连接安装平台底端,使机器人在受到力时,进行减震,从而实现对机器人进行减震效果。
4、优选地,所述安装平台内设有减震机构,所述支撑柱贯穿减震机构中的腔连接工型块,所述工型块外端设有板簧,所述板簧两侧底端设有弹簧阻尼器,使机器人在收到纵向力时,进行减震,从而实现对机器人进行减震效果。
5、优选地,所述安装平台上端内设有减震机构二,所述减震机构二包括固定板,所述固定板外端移动柱贯穿槽连接曲柄,所述曲柄另一端设有滑块,所述槽与滑块间设有弹簧,且曲柄、滑块、移动柱间铰链连接,使机器人在收到横向力时,进行减震,从而实现对机器人进行减震效果。
6、优选地,所述摄像检查机构包括电动伸缩杆,所述电动伸缩杆贯穿保护箱连接电动旋转台,所述电动旋转台上端设有探测器。
7、优选地,所述安装平台上设有单片机,所述单片机与电机、电动伸缩杆、电动旋转台、探测器之间电性连接。
8、本实用新型的有益效果包括:通过设置叉臂、减震阻尼器、支撑柱、工型块、板簧、弹簧阻尼器,能够在机器人在纵向受力时产生的纵向抖动减小,减轻坑洼路面对机器人的影响,从而实现了巡检机器人的减震;
9、通过设置曲柄、滑块、移动柱、以及弹簧,能够使机器人在横向受力时产生的横向晃动减小,减轻坑洼路面对机器人的影响,从而实现巡检机器人的减震效果;
10、通过设置传动机构中的车轮、安装轴、传动轴与减震机构三的配合使用,从而实现减震效果,该装置减震效果好,行进过程中摄像头的抖动较小,可实现更佳的安防巡检效果,相比于其他传统装置更好。
技术特征:
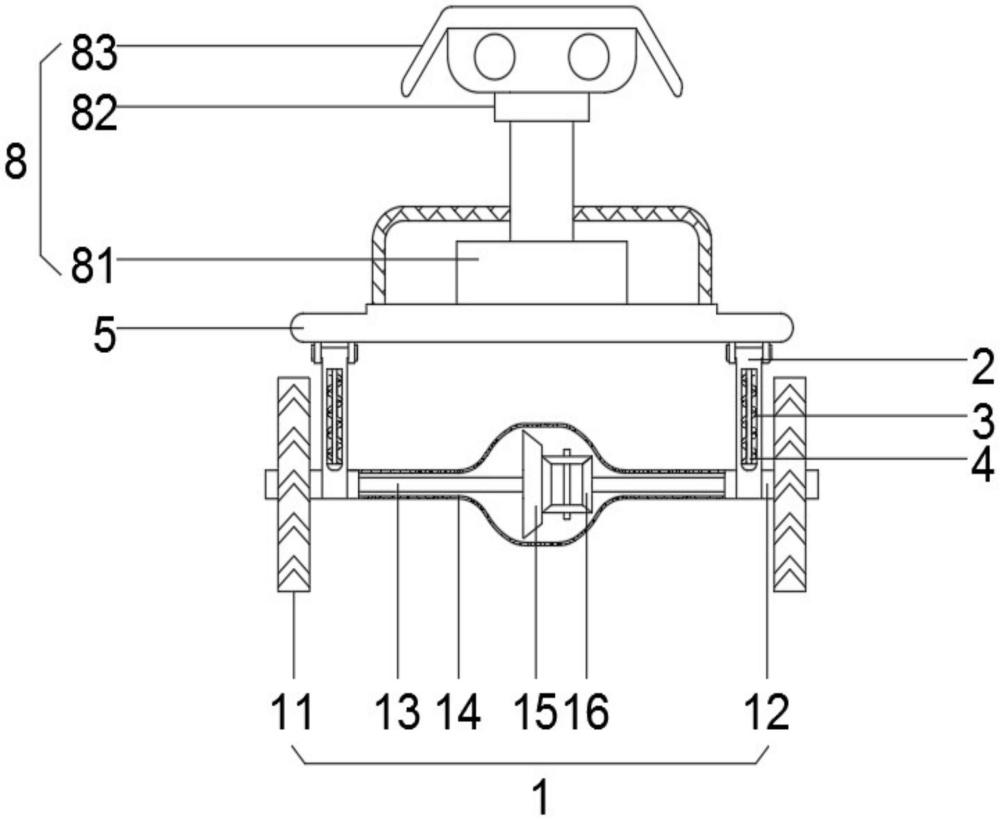
1.一种具有减震效果的巡检机器人,包括传动机构(1),其特征在于:所述传动机构(1)上端设有减震机构三,所述减震机构三上端设有安装平台(5),所述安装平台(5)上端设有摄像检查机构(8),所述传动机构(1)之间设有车架(9),所述车架(9)上设有电机(10),所述电机(10)输出轴贯穿保护壳(14)连接锥齿轮(15)。
2.根据权利要求1所述的一种具有减震效果的巡检机器人,其特征在于:所述传动机构(1)包括两侧车轮(11),所述车轮(11)内设有安装轴(12),所述安装轴(12)间设有传动轴(13)、保护壳(14),且传动轴(13)设置在保护壳(14)内,所述传动轴(13)间设有差速器(16),且差速器(16)一侧传动轴(13)上设有锥齿轮(15)。
3.根据权利要求2所述的一种具有减震效果的巡检机器人,其特征在于:所述减震机构三设置在安装轴(12)上,所述减震机构三包括叉臂(2)、减震阻尼器(3)、支撑柱(4),且叉臂(2)通过铰链连接安装平台(5)底端。
4.根据权利要求3所述的一种具有减震效果的巡检机器人,其特征在于:所述安装平台(5)内设有减震机构(6),所述支撑柱(4)贯穿减震机构(6)中的腔(61)连接工型块(64),所述工型块(64)外端设有板簧(63),所述板簧(63)两侧底端设有弹簧阻尼器(62)。
5.根据权利要求1所述的一种具有减震效果的巡检机器人,其特征在于:所述安装平台(5)上端内设有减震机构二(7),所述减震机构二(7)包括固定板(71),所述固定板(71)外端移动柱贯穿槽(72)连接曲柄(73),所述曲柄(73)另一端设有滑块(74),所述槽(72)与滑块(74)间设有弹簧,且曲柄(73)、滑块(74)、移动柱间铰链连接。
6.根据权利要求1所述的一种具有减震效果的巡检机器人,其特征在于:所述摄像检查机构(8)包括电动伸缩杆(81),所述电动伸缩杆(81)贯穿保护箱连接电动旋转台(82),所述电动旋转台(82)上端设有探测器(83)。
7.根据权利要求6所述的一种具有减震效果的巡检机器人,其特征在于:所述安装平台(5)上设有单片机,所述单片机与电机(10)、电动伸缩杆(81)、电动旋转台(82)、探测器(83)之间电性连接。
技术总结
本技术公开了一种具有减震效果的巡检机器人,涉及机器人领域,旨在解决现有技术中机器人在路面时,产生震动的问题,采用的技术方案是,包括传动机构,所述传动机构上端设有减震机构三,所述减震机构三上端设有安装平台,所述安装平台上端设有摄像检查机构,本技术通过设置叉臂、减震阻尼器、支撑柱、工型块、板簧、弹簧阻尼器,通过设置曲柄、滑块、移动柱、以及弹簧,能够使机器人在收到横向受力时,减轻坑洼路面对机器人的影响,通过设置传动机构中的车轮、安装轴、传动轴与减震机构三的配合使用,从而实现减震效果,该装置减震效果好,巡检功能好,相比于其他传统装置更好。
技术研发人员:刘勇,请求不公布姓名,请求不公布姓名
受保护的技术使用者:大陆智源机器人(盐城)有限公司
技术研发日:20230625
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!