一种锂电池用多联动搬运机械手的制作方法
本技术属于锂离子电池制造,特别是一种锂电池用多联动搬运机械手。
背景技术:
1、本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
2、随着电动汽车的不断普及以及储能行业的迅速发展,锂离子电池尤其是方形铝壳锂离子电池的应用越来越广泛。在方形铝壳锂离子电池生产环节中,锂离子电池的搬运和上下料都是通过搬运机械手来完成。而目前锂电设备中的搬运机械手,一般一次只能搬运一个电芯,搬运效率低下;同时在搬运过程或取放锂电池时,因不具备柔性的缓冲结构以及夹爪刚性比较大,极易造成锂离子电池的损伤,导致锂电池制造成本提高;其次,传统的搬运机械手还存在搬运不同规格产品时,存在换型时间长、换型成本高的问题;最后,传统的搬运机械手在搬运过程中,搬运夹爪在竖直方向运动时无导向,且产品无拘束结构,导致在搬运过程中可能会发生产品位置偏移或掉落。
技术实现思路
1、本实用新型的目的在于提供一种锂电池用多联动搬运机械手,结构简单、成本低、搬运效率高、换型便捷,搬运过程中锂电池不易掉落,搬运过程精准平稳快速,且不易造成锂电池损伤,解决现有技术中的问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
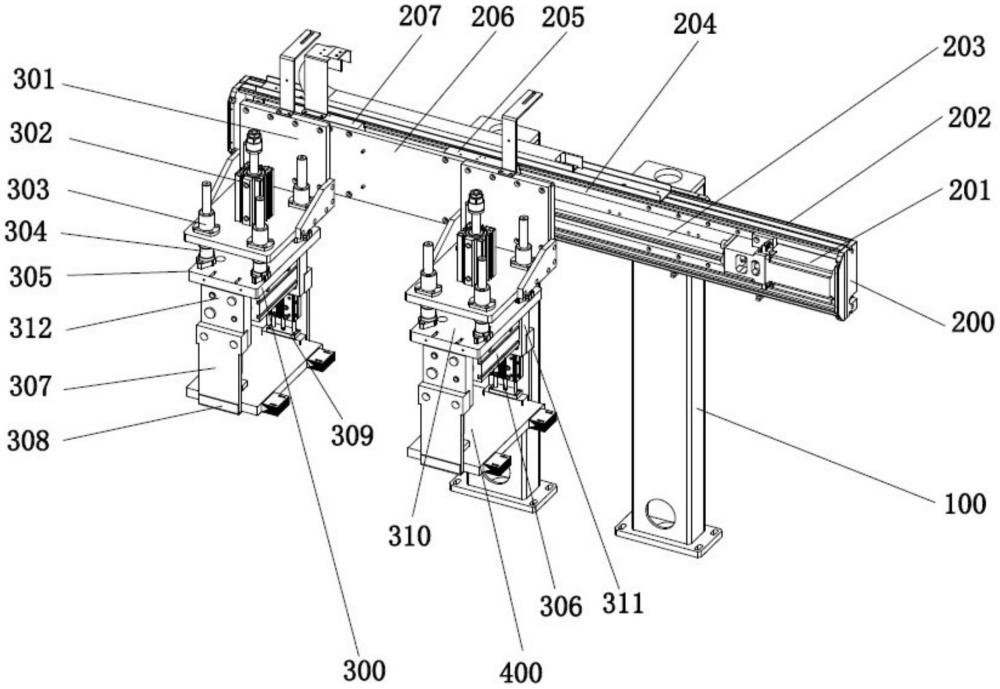
3、本实用新型为一种锂电池用多联动搬运机械手,包括搬运机械手组件,所述搬运机械手组件包括固定支架,所述固定支架上设置有升降气缸,所述升降气缸的伸出端连接有搬运夹爪组件,所述搬运夹爪组件用于对锂电池进行夹持;所述固定支架上还设置有多个安装孔,每个安装孔内均设置有直线轴承组件,所述直线轴承组件包括轴承、轴和浮动弹簧,所述轴安装于轴承的内圈之中,所述轴承的外圈安装于安装孔之中,所述轴的末端设置有浮动弹簧,所述浮动弹簧与搬运夹爪组件相接触,用于抵消升降气缸的伸出误差。
4、优选的,所述搬运夹爪组件包括基板,所述基板的顶部与升降气缸的伸出端固定连接,同时与浮动弹簧弹性连接;所述基板的底部设置有第一竖板和第二竖板,所述第一竖板和第二竖板的下部均设置有夹爪,所述第二竖板与基板之间滑动连接,所述第一竖板和第二竖板之间设置有夹爪气缸,所述夹爪气缸的伸出端与第二竖板相连接。
5、优选的,所述夹爪气缸包括缸体和伸出杆,所述缸体与第一竖板固定连接。
6、优选的,所述夹爪包括立板,所述立板的底部设置有底托板,所述底托板用于对锂电池的底部进行托举,所述底托板由具有一定的弹性变形能力的非金属材料制成;所述立板的上部与第一竖板或第二竖板的下部相连接。
7、优选的,所述立板与第一竖板或第二竖板之间均通过螺栓可拆卸的连接。
8、优选的,所述第一竖板和第二竖板的内侧均设置有拘束气缸,所述拘束气缸的伸出端朝向底托板的方向,用于与底托板相配合对锂电池进行固定。
9、优选的,还包括机架组件以及设置于机架组件上的水平驱动组件,所述水平驱动组件包括线轨滑块组件,所述线轨滑块组件包括伺服电机和丝杠螺母组件,所述丝杠螺母组件包括丝杠和转动设置于丝杠上的螺母,所述伺服电机的输出轴连接丝杠,所述螺母上设置有过渡板,所述过渡板与线轨滑块组件之间滑动连接;所述过渡板上连接有固定底板,所述固定底板与搬运机械手组件的固定支架相连接。
10、优选的,所述过渡板和固定底板之间还设置有过渡垫板。
11、优选的,所述机架组件包括机架本体和设置于机架本体顶部的固定板,所述固定板与线轨滑块组件相连接。
12、优选的,所述搬运机械手组件的数量设置有两个或两个以上。
13、本实用新型具有以下有益效果:
14、1、本实用新型提供了一种锂电池用多联动搬运机械手,搬运夹爪组件与固定支架间设有多组直线轴承组件,能够在升降气缸带动搬运夹爪组件上下运动的同时,利用直线轴承组件进行竖直方向运动的导向,保证搬运的精准和平稳;在直线轴承组件的底部设有浮动弹簧,此弹簧在锂电池取放过程中提供一定的缓冲空间,当升降气缸伸出位置超出设定位置时,浮动弹簧会压缩抵消掉升降气缸伸出的位置误差,防止过程中锂电池因位置超限被压伤,同时有效保护锂电池因放置瞬间撞击导致的损伤。
15、2、本实用新型设置了拘束气缸,拘束气缸的伸出端朝向底托板的方向,搬运过程中拘束气缸组件会将锂电池进行拘束,与底托板相配合对锂电池进行固定,保证锂电池搬运过程的位置精准度。
16、3、本实用新型在夹取不同尺寸的锂电池时,只需调整夹爪气缸的夹取行程即可;如果锂电池的尺寸变化较大,夹爪气缸的夹取行程无法兼容时,只需更换夹爪立板和底托板即可,更换方便、简洁,换型便捷,换型成本低。
17、4、底托板是由非金属材料一体化机加工而成,零件的加工精度高,在保证底托板整体强度同时,又具有一定的弹性变形能力,能够尽可能的减少对锂电池的损伤。
18、5、本实用新型的两个或两个以上熟练的搬运机械手组件利用同一个伺服电机通过丝杆螺母组件进行驱动,在提高搬运效率的同时,相比传统的单电机驱动单机械手,降低了设备成本;在水平驱动组件末端设有过渡垫板与线轨滑块相连,保证了多联动搬运机械手的运动稳定性。
19、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种锂电池用多联动搬运机械手,其特征在于,包括搬运机械手组件,所述搬运机械手组件包括固定支架,所述固定支架上设置有升降气缸,所述升降气缸的伸出端连接有搬运夹爪组件,所述搬运夹爪组件用于对锂电池进行夹持;所述固定支架上还设置有多个安装孔,每个安装孔内均设置有直线轴承组件,所述直线轴承组件包括轴承、轴和浮动弹簧,所述轴安装于轴承的内圈之中,所述轴承的外圈安装于安装孔之中,所述轴的末端设置有浮动弹簧,所述浮动弹簧与搬运夹爪组件相接触,用于抵消升降气缸的伸出误差。
2.根据权利要求1所述的锂电池用多联动搬运机械手,其特征在于,所述搬运夹爪组件包括基板,所述基板的顶部与升降气缸的伸出端固定连接,同时与浮动弹簧弹性连接;所述基板的底部设置有第一竖板和第二竖板,所述第一竖板和第二竖板的下部均设置有夹爪,所述第二竖板与基板之间滑动连接,所述第一竖板和第二竖板之间设置有夹爪气缸,所述夹爪气缸的伸出端与第二竖板相连接。
3.根据权利要求2所述的锂电池用多联动搬运机械手,其特征在于,所述夹爪气缸包括缸体和伸出杆,所述缸体与第一竖板固定连接。
4.根据权利要求2所述的锂电池用多联动搬运机械手,其特征在于,所述夹爪包括立板,所述立板的底部设置有底托板,所述底托板用于对锂电池的底部进行托举,所述底托板由具有弹性变形能力的非金属材料制成;所述立板的上部与第一竖板或第二竖板的下部相连接。
5.根据权利要求4所述的锂电池用多联动搬运机械手,其特征在于,所述立板与第一竖板或第二竖板之间均通过螺栓可拆卸的连接。
6.根据权利要求4所述的锂电池用多联动搬运机械手,其特征在于,所述第一竖板和第二竖板的内侧均设置有拘束气缸,所述拘束气缸的伸出端朝向底托板的方向,用于与底托板相配合对锂电池进行固定。
7.根据权利要求1所述的锂电池用多联动搬运机械手,其特征在于,还包括机架组件以及设置于机架组件上的水平驱动组件,所述水平驱动组件包括线轨滑块组件,所述线轨滑块组件包括伺服电机和丝杠螺母组件,所述丝杠螺母组件包括丝杠和转动设置于丝杠上的螺母,所述伺服电机的输出轴连接丝杠,所述螺母上设置有过渡板,所述过渡板与线轨滑块组件之间滑动连接;所述过渡板上连接有固定底板,所述固定底板与搬运机械手组件的固定支架相连接。
8.根据权利要求7所述的锂电池用多联动搬运机械手,其特征在于,所述过渡板和固定底板之间还设置有过渡垫板。
9.根据权利要求7所述的锂电池用多联动搬运机械手,其特征在于,所述机架组件包括机架本体和设置于机架本体顶部的固定板,所述固定板与线轨滑块组件相连接。
10.根据权利要求1所述的锂电池用多联动搬运机械手,其特征在于,所述搬运机械手组件的数量设置有两个或两个以上。
技术总结
本技术公开一种锂电池用多联动搬运机械手,涉及锂电池制造技术领域。包括搬运机械手组件,搬运机械手组件包括固定支架,固定支架上设置有升降气缸,升降气缸的伸出端连接有搬运夹爪组件,搬运夹爪组件用于对锂电池进行夹持;固定支架上还设置有多个安装孔,每个安装孔内均设置有直线轴承组件,直线轴承组件包括轴承、轴和浮动弹簧,所述轴安装于轴承的内圈之中,轴承的外圈安装于安装孔之中,轴的末端设置有浮动弹簧,浮动弹簧与搬运夹爪组件相接触,用于抵消升降气缸的伸出误差。本技术结构简单、成本低、搬运效率高、换型便捷,搬运过程中锂电池不易掉落,搬运过程精准平稳快速,且不易造成锂电池损伤。
技术研发人员:杨松,刘汇明,方敏,郭彪
受保护的技术使用者:安徽得壹能源科技有限公司
技术研发日:20230710
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!