一种机械手翻转底座的固定结构
本技术涉及机械手领域,具体是一种机械手翻转底座的固定结构。
背景技术:
1、能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和等部门。
2、机械手在安装使用时,一般都需要一个底座将机械手支撑到地面上,但是,现有的机械手底座多是固定高度,安装好之后机械手的高度就难以调整,而工厂在使用机械手的过程中,由于生产线的调整、产品的改变等因素,往往需要调整机械手的安装高度,因此,针对以上现状,迫切需要开发一种高度调节方便,便于根据使用需求调整机械手的高度的机械手翻转底座的固定结构,以克服当前实际应用中的不足,满足当前的需求。
技术实现思路
1、本实用新型的目的在于提供一种机械手翻转底座的固定结构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
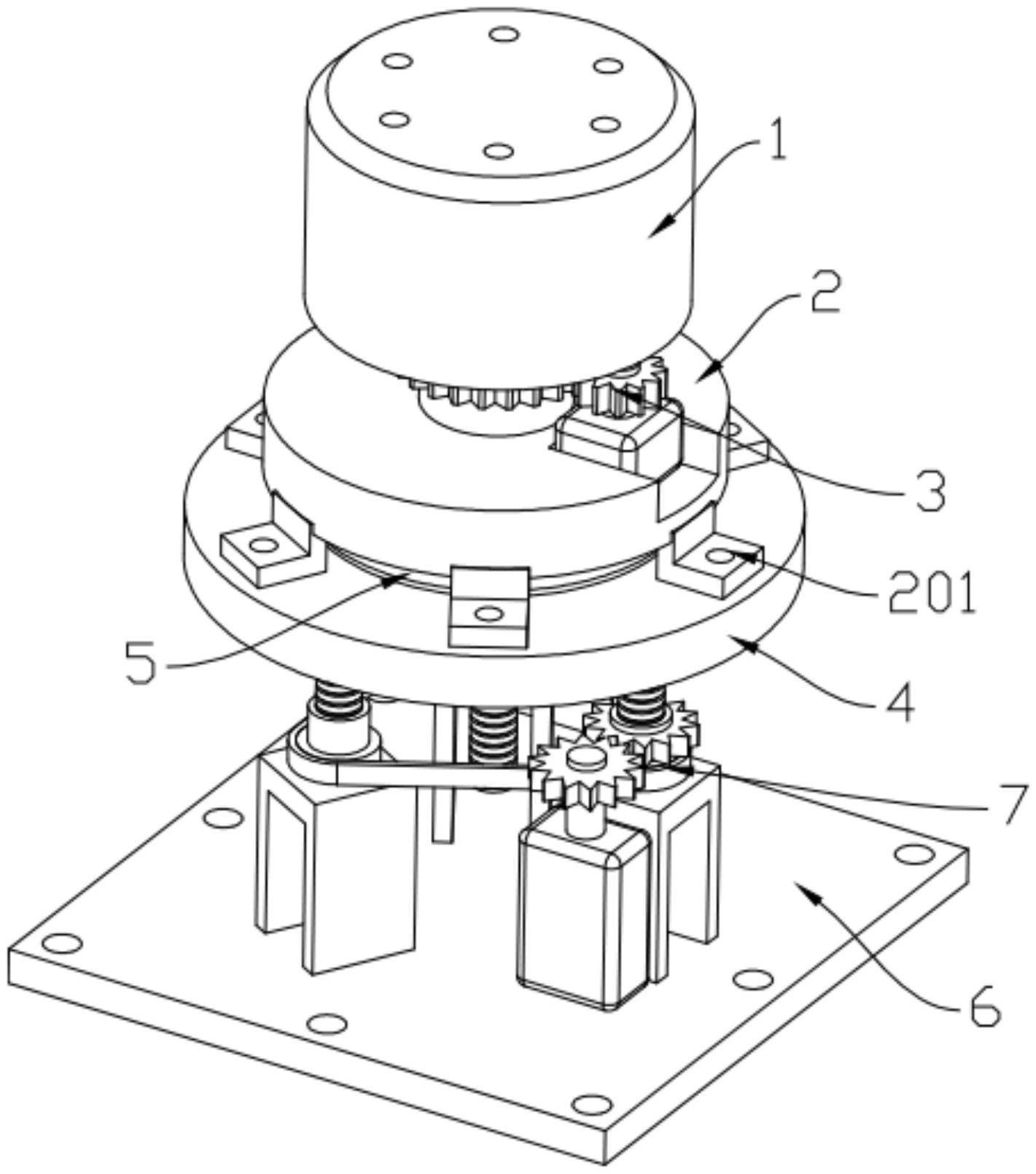
3、一种机械手翻转底座的固定结构,包括机械手安装座、转接座、翻转机构、升降座、橡胶板、固定基座和高度调节机构,所述机械手安装座的下侧安装有转接座,所述转接座上安装有用于带动机械手安装座转动的翻转机构,所述转接座的下侧安装有升降座,所述转接座的外圈固定有多个固定块,所述固定块通过螺栓与升降座相固定,所述升降座的下侧安装有固定基座,所述固定基座通过螺栓固定在地面上,所述固定基座上安装有用于带动升降座上下移动的高度调节机构,所述高度调节机构包括:支架、螺纹套、同步轮、同步带、螺纹杆、第二电机、第三齿轮和第四齿轮,所述固定基座上固定有三个支架,每个所述支架上均转动连接有一个螺纹套,每个所述螺纹套的外圈均安装有一个同步轮,三个所述同步轮之间通过同步带传动连接,每个所述螺纹套内均安装有一个将其贯穿的螺纹杆,所述螺纹杆的顶部与升降座相固定,所述第二电机固定于固定基座上,所述第二电机的输出轴上安装有第三齿轮,所述第三齿轮的一侧安装有与之转动配合的第四齿轮,所述第四齿轮安装于螺纹套上。
4、作为本实用新型进一步的方案:所述转接座的底部安装有与升降座相贴合的橡胶板。
5、作为本实用新型再进一步的方案:所述翻转机构包括:第一电机、第一齿轮、第二齿轮和支撑轴,所述第一电机固定于转接座上,所述第一电机的输出轴上安装有第一齿轮,所述第一齿轮的一侧安装有与之转动配合的第二齿轮,所述第二齿轮安装于支撑轴上,所述支撑轴与转接座转动连接,所述支撑轴的顶部与机械手安装座相固定。
6、作为本实用新型再进一步的方案:三个所述同步轮以升降座的中轴线为基准呈圆形均布。
7、有益效果:该机械手翻转底座的固定结构,使用时,将固定基座固定到地面上,将机械手安装到机械手安装座上,通过第二电机带动第三齿轮和第四齿轮转动,通过第四齿轮带动螺纹套转动,通过螺纹套转动带动螺纹杆移动,通过螺纹杆带动升降座上下移动,通过升降座带动转接座和机械手安装座上下移动,进而调整机械手的高度,以满足不同工况下的使用需求;通过第一电机带动第一齿轮和第二齿轮转动,通过第二齿轮带动支撑轴转动,通过支撑轴带动机械手安装座转动,通过机械手安装座带动机械手转动,进而调整机械手朝向。综上所述,本实用新型高度调节方便,便于根据使用需求调整机械手的高度。
技术特征:
1.一种机械手翻转底座的固定结构,其特征在于:包括机械手安装座(1)、转接座(2)、翻转机构(3)、升降座(4)、橡胶板(5)、固定基座(6)和高度调节机构(7),所述机械手安装座(1)的下侧安装有转接座(2),所述转接座(2)上安装有用于带动机械手安装座(1)转动的翻转机构(3),所述转接座(2)的下侧安装有升降座(4),所述转接座(2)的外圈固定有多个固定块(201),所述固定块(201)通过螺栓与升降座(4)相固定,所述升降座(4)的下侧安装有固定基座(6),所述固定基座(6)通过螺栓固定在地面上,所述固定基座(6)上安装有用于带动升降座(4)上下移动的高度调节机构(7),所述高度调节机构(7)包括:支架(701)、螺纹套(702)、同步轮(703)、同步带(704)、螺纹杆(705)、第二电机(706)、第三齿轮(707)和第四齿轮(708),所述固定基座(6)上固定有三个支架(701),每个所述支架(701)上均转动连接有一个螺纹套(702),每个所述螺纹套(702)的外圈均安装有一个同步轮(703),三个所述同步轮(703)之间通过同步带(704)传动连接,每个所述螺纹套(702)内均安装有一个将其贯穿的螺纹杆(705),所述螺纹杆(705)的顶部与升降座(4)相固定,所述第二电机(706)固定于固定基座(6)上,所述第二电机(706)的输出轴上安装有第三齿轮(707),所述第三齿轮(707)的一侧安装有与之转动配合的第四齿轮(708),所述第四齿轮(708)安装于螺纹套(702)上。
2.根据权利要求1所述的机械手翻转底座的固定结构,其特征在于:所述转接座(2)的底部安装有与升降座(4)相贴合的橡胶板(5)。
3.根据权利要求1所述的机械手翻转底座的固定结构,其特征在于:所述翻转机构(3)包括:第一电机(301)、第一齿轮(302)、第二齿轮(303)和支撑轴(304),所述第一电机(301)固定于转接座(2)上,所述第一电机(301)的输出轴上安装有第一齿轮(302),所述第一齿轮(302)的一侧安装有与之转动配合的第二齿轮(303),所述第二齿轮(303)安装于支撑轴(304)上,所述支撑轴(304)与转接座(2)转动连接,所述支撑轴(304)的顶部与机械手安装座(1)相固定。
4.根据权利要求1所述的机械手翻转底座的固定结构,其特征在于:三个所述同步轮(703)以升降座(4)的中轴线为基准呈圆形均布。
技术总结
本技术公开了一种机械手翻转底座的固定结构,包括机械手安装座、转接座、翻转机构、升降座、橡胶板、固定基座和高度调节机构,机械手安装座的下侧安装有转接座,转接座上安装有用于带动机械手安装座转动的翻转机构,转接座的下侧安装有升降座,转接座的外圈固定有多个固定块,固定块通过螺栓与升降座相固定,升降座的下侧安装有固定基座,固定基座通过螺栓固定在地面上,固定基座上安装有用于带动升降座上下移动的高度调节机构,高度调节机构包括:支架、螺纹套、同步轮、同步带、螺纹杆、第二电机、第三齿轮和第四齿轮。本技术高度调节方便,便于根据使用需求调整机械手的高度。
技术研发人员:胡同腾,高跃庭,习俊梅,许会林,向明华,邱榕,顾怀华,杨武
受保护的技术使用者:南昌工程学院
技术研发日:20230724
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!