一种模块化快换多功能机器人工作站的制作方法
本技术涉及机器人生产领域,特别涉及一种模块化快换多功能机器人工作站。
背景技术:
1、机器人是自动执行工作的机器装置。机器人可接受人类指挥,也可以执行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。机器人执行的是取代或是协助人类工作的工作,例如制造业、建筑业,或是危险的工作。
2、而机器人在流水线上进行输送的过程中,需要先对其进行夹持定位,避免在输送过程中机器人出现晃动等问题,从而方便对机器人进行快速装配加工,提高机器人生产的工作效率。
3、为解决上述问题,我们提出一种模块化快换多功能机器人工作站来解决上述问题。
技术实现思路
1、本实用新型的主要目的在于提供一种模块化快换多功能机器人工作站,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
3、一种模块化快换多功能机器人工作站,包括操作台,所述操作台的上端中部设置有圆形的置物槽,所述置物槽的内侧中部滑动安装有固定台,所述固定台为圆形,所述固定台的上端中部阵列分布有多组固定孔,通过把需要进行加工的机器人放置在固定台上,然后通过螺栓与固定孔进行螺纹连接,从而可以把机器人固定安装在固定台上进行限位固定。
4、所述置物槽的内侧四周均设置有夹持组件,所述夹持组件在置物槽的内侧中部进行水平方向滑动,所述夹持组件位于固定台的四周中部,通过四组夹持组件可以对固定台从四周进行夹紧固定,从而实现对固定台进行快速的限位定位。
5、优选的,所述夹持组件包括有弧形的夹板,所述夹板的夹持面与固定台相贴合,所述夹板滑动安装在置物槽的内侧四周,所述夹板的背面两侧均设置有伸缩杆,所述伸缩杆的基座固定安装在操作台的内侧四角,通过伸缩杆对夹板进行推动,从而使得对固定台进行四周夹持定位。
6、优选的,所述操作台的内侧中部固定安装有电磁吸盘,所述固定台滑动安装在电磁吸盘的上端中部,所述固定台的底端中部设置有吸附块,所述电磁吸盘与吸附块进行电磁吸附,通过电磁吸盘对吸附块进行电磁吸附,可以对固定台进行吸附固定。
7、优选的,所述夹板与固定台的接触面设置有防滑垫,防滑垫起到防滑的作用。
8、优选的,所述操作台的底端中部设置有底座,所述底座的内侧中部固定安装有伺服电机,所述伺服电机的输出轴固定安装在操作台的底端中部,通过伺服电机进行转动,可以带动操作台在底座的上端表面进行360度旋转,从而方便对机器人的位置进行旋转调整,提高机器人加工的工作效率。
9、优选的,所述底座的底端两侧均设置有滑轨,所述底座在滑轨的上端中部进行水平方向滑动,通过底座在滑轨上进行滑动,从而方便把机器人输送到加工装置处进行加工。
10、优选的,所述操作台的底端中部设置有支撑架,两组所述滑轨固定安装在支撑架的上端中部,所述支撑架的两端中部均设置有护板,所述护板位于操作台的两端中部,通过支撑架对滑轨进行支撑,从而加强对机器人进行运输输送时的稳定性。
11、与现有技术相比,本实用新型具有如下有益效果:
12、1、通过把需要进行加工的机器人放置在固定台上进行限位固定,然后通过四组夹持组件从固定台的侧端四周进行夹持限位,从而可以把固定台限位在置物槽的内侧中部位置,此时再通过电磁吸盘对吸附块进行电磁吸附,从而使得对固定台进行吸附固定,从而保持对机器人进行加工时的稳定性,通过上述装置可以对机器人进行快速的限位定位,从而提高对机器人进行加工的工作效率。
13、2、通过在操作台的底端中部设置有底座,通过底座可以对操作台起到稳定的支撑,同时通过伺服电机进行转动,可以带动操作台在底座的上端表面进行360度旋转,然后通过底座在滑轨的上端中部进行水平方向滑动,通过上述装置可以对机器人的位置进行快速调整,从而方便加工机构对机器人进行快速的定位加工,提高机器人加工的工作效率。
技术特征:
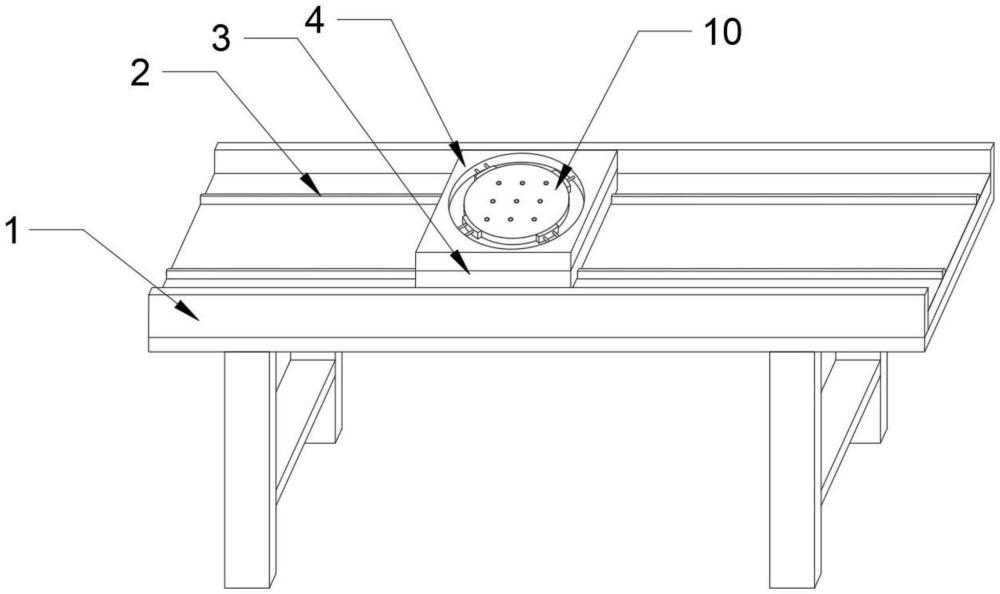
1.一种模块化快换多功能机器人工作站,其特征在于,包括操作台(4),所述操作台(4)的上端中部设置有圆形的置物槽(6),所述置物槽(6)的内侧中部滑动安装有固定台(10),所述固定台(10)为圆形,所述固定台(10)的上端中部阵列分布有多组固定孔;
2.根据权利要求1所述的一种模块化快换多功能机器人工作站,其特征在于:所述夹持组件包括有弧形的夹板(8),所述夹板(8)的夹持面与固定台(10)相贴合,所述夹板(8)滑动安装在置物槽(6)的内侧四周,所述夹板(8)的背面两侧均设置有伸缩杆(9),所述伸缩杆(9)的基座固定安装在操作台(4)的内侧四角。
3.根据权利要求2所述的一种模块化快换多功能机器人工作站,其特征在于:所述操作台(4)的内侧中部固定安装有电磁吸盘(7),所述固定台(10)滑动安装在电磁吸盘(7)的上端中部,所述固定台(10)的底端中部设置有吸附块,所述电磁吸盘(7)与吸附块进行电磁吸附。
4.根据权利要求3所述的一种模块化快换多功能机器人工作站,其特征在于:所述夹板(8)与固定台(10)的接触面设置有防滑垫。
5.根据权利要求3所述的一种模块化快换多功能机器人工作站,其特征在于:所述操作台(4)的底端中部设置有底座(3),所述底座(3)的内侧中部固定安装有伺服电机(5),所述伺服电机(5)的输出轴固定安装在操作台(4)的底端中部。
6.根据权利要求5所述的一种模块化快换多功能机器人工作站,其特征在于:所述底座(3)的底端两侧均设置有滑轨(2),所述底座(3)在滑轨(2)的上端中部进行水平方向滑动。
7.根据权利要求6所述的一种模块化快换多功能机器人工作站,其特征在于:所述操作台(4)的底端中部设置有支撑架(1),两组所述滑轨(2)固定安装在支撑架(1)的上端中部。
8.根据权利要求7所述的一种模块化快换多功能机器人工作站,其特征在于:所述支撑架(1)的两端中部均设置有护板,所述护板位于操作台(4)的两端中部。
技术总结
本申请提供了一种模块化快换多功能机器人工作站,包括操作台,操作台的上端中部设置有圆形的置物槽,置物槽的内侧中部滑动安装有固定台,固定台为圆形,固定台的上端中部阵列分布有多组固定孔,置物槽的内侧四周均设置有夹持组件,夹持组件在置物槽的内侧中部进行水平方向滑动,夹持组件位于固定台的四周中部,夹持组件包括有弧形的夹板,夹板的夹持面与固定台相贴合,夹板滑动安装在置物槽的内侧四周,夹板的背面两侧均设置有伸缩杆。本技术通过四组夹持组件从固定台的侧端四周进行夹持限位,同时通过电磁吸盘对吸附块进行电磁吸附,从而实现对机器人进行快速的限位定位,从而提高对机器人进行加工的工作效率。
技术研发人员:孙红荃
受保护的技术使用者:天津一格机器人有限公司
技术研发日:20230725
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!