一种防爆并联机器人的制作方法
本技术涉及机器人,特别是涉及一种防爆性能优异体积小且可实现多套协同的防爆并联机器人。
背景技术:
1、并联机器人,英文名为parallel mechanism,简称pm,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。并联机器人的特点呈现为无累积误差,精度较高;执行机构驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好。
2、在爆炸性生产环境,需要相适应的防爆型并联机器人,以满足该环境下高速拾取、装盒等应用。现有技术中的并联机器人的防爆形式采用的是外加正压防护外壳方式,体积较大,不便于工程实施。
3、同时现有技术中的并联机器人控制器,通常采用专用控制器,一方面开放性不够,不便于多套之间协同,不便于与生产线控制单元的集成;另一方面,一套专用控制器基本上能控制一到两套的机器人本体,且不便于扩展。
技术实现思路
1、鉴于上述问题,本实用新型提供用于克服上述问题或者至少部分地解决上述问题的一种防爆并联机器人。解决了现有的并联机器人的防爆形式采用的外加正压防护外壳方式存在的体积较大,不便于工程实施问题,以及现有的并联机器人控制器,基本采用专用控制器存在的开放性不够,不便于多套之间协同、生产线控制单元的集成且不便于多套扩展等问题。
2、本实用新型提供了如下方案:
3、一种防爆并联机器人,包括:
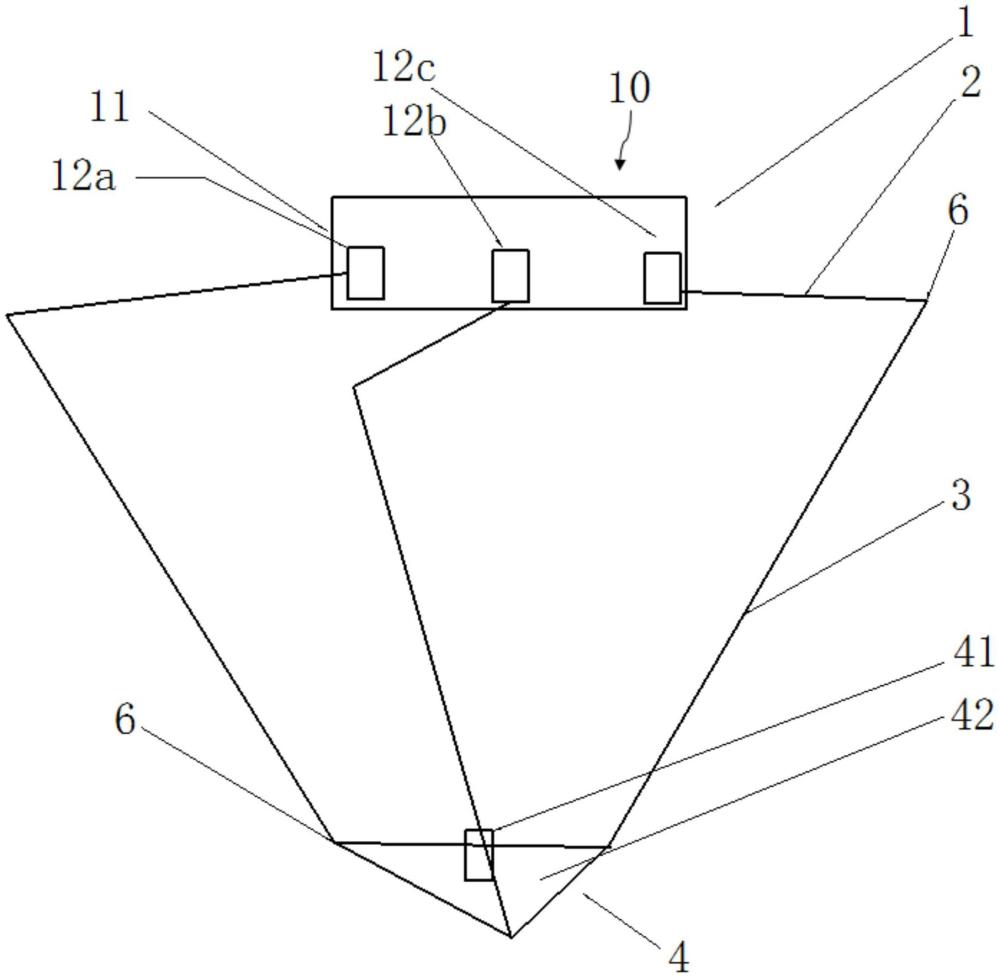
4、至少两套机械臂单元,至少两套所述机械臂单元用于连接静平台以及动平台;所述静平台设置有至少两台第一驱动电机,至少两台所述第一驱动电机一一对应地与至少两套所述机械臂单元相连,所述第一驱动电机用于驱动与其相连的所述机械臂旋转;所述动平台设置有至少一台第二驱动电机,所述第二驱动电机用于驱动与其相连的执行机构旋转;
5、控制单元,所述控制单元包括主控制器以及至少一套本体伺服驱动器组;所述主控制器以及至少一套本体伺服驱动器组均设置于密闭的防爆控制柜内;所述本体伺服驱动器组包括至少四个伺服驱动器;至少四个所述伺服驱动器分别与至少三台所述第一驱动电机以及至少一台所述第二驱动电机一一对应的相连接;
6、其中,所述第一驱动电机、所述第二驱动电机以及所述防爆控制柜均符合ex diibt4/ex td a21 ip65 t135°防爆安全资质认证。
7、优选地:所述机械臂单元包括平行四边形机构以及定长杆;所述平行四边形机构的两端分别通过旋转副与所述定长杆以及所述动平台相连;所述定长杆与所述第一驱动电机相连。
8、优选地:所述静平台包括第一基座,至少两台所述第一驱动电机均与所述第一基座相连。
9、优选地:所述动平台包括第二基座,至少一台所述第二驱动电机均与所述第二基座相连。
10、优选地:所述机械臂单元包括三套。
11、优选地:所述主控制器通过控制总线与至少一套所述本体伺服驱动器组包含的各个所述伺服驱动器以链式连接的方式相连。
12、优选地:所述控制总线包括以太网控制自动化技术协议。
13、优选地:所述主控制器包括plc控制平台。
14、优选地:所述主控制器配置有至少一套机器人本体控制模块以及设备控制模块;所述设备控制模块至少包括离散逻辑控制模块、多伺服轴运动控制模块。
15、优选地:同一台机器人包含的所述机器人本体控制模块与所述设备控制模块之间通过所述主控制器的内存通道进行数据交互,以便多台机器人以及设备整体逻辑控制单元之间的集成和协同控制。
16、根据本实用新型提供的具体实施例,本实用新型公开了以下技术效果:
17、本申请实施例提供的一种防爆并联机器人,安装在机器人本体上的驱动电机以及用于安装控制器和驱动器组等元器件的控制箱柜分别采用具备ex d iibt4/ex td a21ip65 t135°防爆资质认证的防爆伺服电机和防爆控制柜,满足1区、21区爆炸性危险环境及f1区火炸药生产危险环境使用要求。解决了现有的并联机器人的防爆形式采用的外加正压防护外壳方式存在的体积较大,不便于工程实施问题。
18、另外,在优选的实施方式下,机器人控制单元具备单控制器控制多套机器人,同时完成设备其它部分离散逻辑控制及运动控制,并能基于内存通道进行交互,具备较好的开放性、便于多套之间协同、生产线控制单元的集成且便于多套扩展的优势。机器人控制单元采用基于ethercat总线控制伺服驱动器方式,经过ethercat控制总线进行扩展,1台主控制器可以控制多套机器人本体的伺服驱动器;通过在1台主控制器上构建多个不同的机器人控制模块,能够同时完成多套机器人本体的运动控制;同时通过在同1台主控制器上构建设备其它控制模块,能同时完成设备其它部分包括离散逻辑控制、多伺服轴运动控制。
19、另外,在另一种优选的实施方式下,在同一台机器人主控制器上的多套机器人本体控制模块,以及设备其它通用逻辑及运动控制单元设备其它控制模块之间,通过控制器的控制器内存通道进行快速的无障碍的便捷数据交互,便于多台机器人以及设备整体逻辑控制单元之间的集成和协同控制。
20、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种防爆并联机器人,其特征在于,包括:
2.根据权利要求1所述的防爆并联机器人,其特征在于,所述机械臂单元包括平行四边形机构以及定长杆;所述平行四边形机构的两端分别通过旋转副与所述定长杆以及所述动平台相连;所述定长杆与所述第一驱动电机相连。
3.根据权利要求1所述的防爆并联机器人,其特征在于,所述静平台包括第一基座,至少两台所述第一驱动电机均与所述第一基座相连。
4.根据权利要求1所述的防爆并联机器人,其特征在于,所述动平台包括第二基座,至少一台所述第二驱动电机均与所述第二基座相连。
5.根据权利要求1所述的防爆并联机器人,其特征在于,所述机械臂单元包括三套。
6.根据权利要求1所述的防爆并联机器人,其特征在于,所述主控制器通过控制总线与至少一套所述本体伺服驱动器组包含的各个所述伺服驱动器以链式连接的方式相连。
7.根据权利要求6所述的防爆并联机器人,其特征在于,所述控制总线包括以太网控制自动化技术协议。
8.根据权利要求1所述的防爆并联机器人,其特征在于,所述主控制器包括plc控制平台。
9.根据权利要求8所述的防爆并联机器人,其特征在于,所述主控制器配置有至少一套机器人本体控制模块以及设备控制模块;所述设备控制模块至少包括离散逻辑控制模块、多伺服轴运动控制模块。
10.根据权利要求9所述的防爆并联机器人,其特征在于,同一台机器人包含的所述机器人本体控制模块与所述设备控制模块之间通过所述主控制器的内存通道进行数据交互,以便多台机器人以及设备整体逻辑控制单元之间的集成和协同控制。
技术总结
本技术公开了一种防爆并联机器人,安装在机器人本体上的驱动电机以及用于安装控制器和驱动器组等元器件的控制箱柜分别采用具备Ex D I I BT4/Ex tD A21I P65T135°防爆资质认证的防爆伺服电机和防爆控制柜,满足1区、21区爆炸性危险环境及F1区火炸药生产危险环境使用要求。解决了现有的并联机器人的防爆形式采用的外加正压防护外壳方式存在的体积较大,不便于工程实施问题。
技术研发人员:刘锡朋,诸洪,王尧,刘彬,袁国文,伍凌川,张希康,肖漪帆,金翰林
受保护的技术使用者:中国兵器装备集团自动化研究所有限公司
技术研发日:20230829
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!