夹持器及机器人的制作方法
本申请涉及机器人领域,具体而言,涉及一种夹持器及机器人。
背景技术:
1、夹持器作为机器人操作和动作执行的末端工具在机器人学领域被称之为末端执行器(end-effector)。末端执行器是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器一般包含三类:第一类是多指夹持器(包括2指、3指等);第二类是多指灵巧手;第三类是吸盘、焊枪等专用工具。末端执行器作为机器人与环境相互作用的最后环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。
2、机器人夹持器在夹持物体时主要有两种夹持方式:平行夹持和包络夹持。平行夹持是指夹持器通过传动设计实现夹指末端平行运动,适合用于矩形物体的夹持(或具有两个平行的侧面的物体),在夹爪行程范围内,不受被夹物体宽度的影响,均可以实现平面接触;但对于表面曲率不规则物体,其夹持能力较弱(线接触),需针对被夹物外形设计专用夹指,提高与被夹物体的接触面积。包络夹持是指夹持器的夹指可以实现弯曲运动,用夹指的多个指段包络目标物体,通过多点接触稳定地进行抓持。优势在于可实现包络加持,适合用于表面曲率不规则物体的夹取,但对于扁薄的矩形物体的夹持能力较弱。包络夹持比较容易实现将物体抓起,但较难保证每次夹起后保持物体姿态的一致性。
技术实现思路
1、本申请提供了一种夹持器及机器人,实现更精细化的夹持移动操作。
2、具体地,本申请是通过如下技术方案实现的:
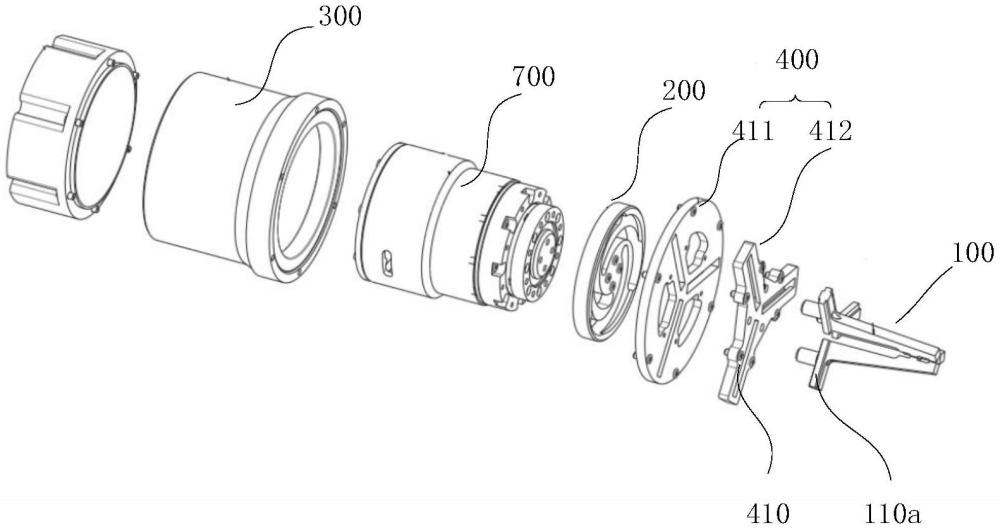
3、本申请的一方面,提供了一种夹持器,包括:
4、夹爪,所述夹爪包括多个夹指,所述多个夹指均匀分布在同一圆周;及
5、活动件,设置成可活动,并且可带动所述多个夹指沿所在圆周的径向朝靠近圆心的方向同步且等距离移动,所述多个夹指朝靠近圆心的一侧同步移动时可用于夹持被夹持物,朝远离所述圆心的一侧移动时可用于释放被夹持物。
6、可选的,所述活动件设置成可转动,所述活动件上设有围绕所述多个夹指所在圆周的圆心均匀分布的多个弧形部,所述多个夹指一一对应地设置在各所述弧形部处,所述弧形部从一端到另一端距离所述圆心的径向尺寸逐渐增大,靠近所述圆心的一端为第一端,远离所述圆心的一端为第二端,所述活动件沿着从所述第一端到所述第二端的方向转动时,所述多个弧形部能够沿径向同步触压对应的各所述夹指向靠近所述圆心的一侧移动,所述活动件沿着从所述第二端到所述第一端的方向转动时,所述多个夹指能够向远离所述圆心的一侧径向移动。
7、可选的,所述弧形部包括沿所述活动件的转轴方向贯通的弧形槽,所述夹指穿设于所述弧形槽内,所述弧形槽包括靠近所述圆心的内侧弧形壁和远离所述圆心的外侧弧形壁,所述活动件沿着从所述第一端到所述第二端的方向转动时可通过所述外侧弧形壁沿径向触压与该弧形槽对应的所述夹指,所述活动件沿着从所述第二端到所述第一端的方向转动时可通过所述内侧弧形壁沿径向触压与该弧形槽对应的所述夹指。
8、可选的,所述夹持器还包括基体和与所述基体相对固定的导向件,所述导向件设有多个导向槽,所述多个导向槽沿所述多个夹指所在圆周的径向延伸,所述多个夹指、多个导向槽、多个弧形槽在所述活动件的转轴方向上一一对应设置,各所述夹指通过与自身对应的所述导向槽插置于相应的所述弧形槽内,各所述夹指在所述外侧弧形壁以及所述内侧弧形壁的触压下沿所述导向槽移动,所述导向件还用于限制所述多个夹指脱出所述弧形槽。
9、可选的,所述导向件包括沿所述活动件的转轴方向排列且保持相对固定的第一部分和第二部分,所述导向槽贯通所述第一部分和所述第二部分,每个所述夹指包括平行于所述第一部分延伸的阻挡部,所述阻挡部设置在所述第一部分与所述第二部分之间,所述第一部分与所述第二部分之间还预留有供所述阻挡部跟随所述夹指径向移动的间隙,各所述夹指通过所述阻挡部被限制在所述弧形槽内。
10、可选的,所述阻挡部与所述导向槽正对设置,所述阻挡部的面积大于所述导向槽的开口面积,所述阻挡部设有与所述导向槽滑动配合的配合结构。
11、可选的,所述导向件正对所述弧形部的部位处还设有通孔,所述弧形部经由所述通孔处裸露。
12、可选的,所述活动件设置为圆盘结构,所述活动件的圆心与所述多个夹指所在圆周的圆心重合。
13、可选的,所述活动件设有三个所述弧形部,所述夹爪包括三个所述夹指。
14、本申请的另一方面,提供了一种机器人,包括上述任一项所述的夹持器。
15、本申请提供的一种夹持器及机器人,其中,多个夹指始终处于同一圆周,且通过活动件的带动可以同步等距离的向靠近圆心或远离圆心的方向径向移动,如此,多个夹指可以在夹持过程中能够实现自动对心,减小多个夹指的中心与被夹持对象的中心的相对偏移量,使得被夹持对象在夹持移动的过程中能够保持在初始姿态,从而实现更精细化的夹持移动操作。
技术特征:
1.一种夹持器,其特征在于,包括:
2.如权利要求1所述的夹持器,其特征在于,所述活动件设置成可转动,所述活动件上设有围绕所述多个夹指所在圆周的圆心均匀分布的多个弧形部,所述多个夹指一一对应地设置在各所述弧形部处,所述弧形部从一端到另一端距离所述圆心的径向尺寸逐渐增大,靠近所述圆心的一端为第一端,远离所述圆心的一端为第二端,所述活动件沿着从所述第一端到所述第二端的方向转动时,所述多个弧形部能够沿径向同步触压对应的各所述夹指向靠近所述圆心的一侧移动,所述活动件沿着从所述第二端到所述第一端的方向转动时,所述多个夹指能够向远离所述圆心的一侧径向移动。
3.如权利要求2所述的夹持器,其特征在于,所述弧形部包括沿所述活动件的转轴方向贯通的弧形槽,所述夹指穿设于所述弧形槽内,所述弧形槽包括靠近所述圆心的内侧弧形壁和远离所述圆心的外侧弧形壁,所述活动件沿着从所述第一端到所述第二端的方向转动时可通过所述外侧弧形壁沿径向触压与该弧形槽对应的所述夹指,所述活动件沿着从所述第二端到所述第一端的方向转动时可通过所述内侧弧形壁沿径向触压与该弧形槽对应的所述夹指。
4.如权利要求3所述的夹持器,其特征在于,所述夹持器还包括基体和与所述基体相对固定的导向件,所述导向件设有多个导向槽,所述多个导向槽沿所述多个夹指所在圆周的径向延伸,所述多个夹指、多个导向槽、多个弧形槽在所述活动件的转轴方向上一一对应设置,各所述夹指通过与自身对应的所述导向槽插置于相应的所述弧形槽内,各所述夹指在所述外侧弧形壁以及所述内侧弧形壁的触压下沿所述导向槽移动,所述导向件还用于限制所述多个夹指脱出所述弧形槽。
5.如权利要求4所述的夹持器,其特征在于,所述导向件包括沿所述活动件的转轴方向排列且保持相对固定的第一部分和第二部分,所述导向槽贯通所述第一部分和所述第二部分,每个所述夹指包括平行于所述第一部分延伸的阻挡部,所述阻挡部设置在所述第一部分与所述第二部分之间,所述第一部分与所述第二部分之间还预留有供所述阻挡部跟随所述夹指径向移动的间隙,各所述夹指通过所述阻挡部被限制在所述弧形槽内。
6.如权利要求5所述的夹持器,其特征在于,所述阻挡部与所述导向槽正对设置,所述阻挡部的面积大于所述导向槽的开口面积,所述阻挡部设有与所述导向槽滑动配合的配合结构。
7.如权利要求4至6任一项所述的夹持器,其特征在于,所述导向件正对所述弧形部的部位处还设有通孔,所述弧形部经由所述通孔处裸露。
8.如权利要求2至6任一项所述的夹持器,其特征在于,所述活动件设置为圆盘结构,所述活动件的圆心与所述多个夹指所在圆周的圆心重合。
9.如权利要求2至6任一项所述的夹持器,其特征在于,所述活动件设有三个所述弧形部,所述夹爪包括三个所述夹指。
10.一种机器人,其特征在于,包括权利要求1至9任一项所述的夹持器。
技术总结
本申请提供一种夹持器及机器人,夹持器包括夹爪和活动件。所述夹爪包括多个夹指,所述多个夹指均匀分布在同一圆周。所述活动件,设置成可活动,并且可带动所述多个夹指沿所在圆周的径向朝靠近圆心的方向同步且等距离移动,所述多个夹指朝靠近圆心的一侧同步移动时可用于夹持被夹持物,朝远离所述圆心的一侧移动时可用于释放被夹持物。
技术研发人员:张佳俊
受保护的技术使用者:北京小米机器人技术有限公司
技术研发日:20230831
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!