定位导航机构的制作方法
本公开涉及一种定位导航机构。
背景技术:
1、随着科技的发展,机器人已经被广泛地应用于各种工业生产线中,甚至被应用于外科手术中,以执行外科手术或者协助医生执行外科手术。
2、在机器人对待操作物体进行操作的过程中,如何快速、准确地跟随待操作物体的具体偏移位置是亟需解决的问题。
3、现有技术中存在通过视觉来进行物体的位姿判定的装置和方法,但是根据视觉来判断物体的位姿误差较大,机器人在操作这些物体时,容易产生错误,这无疑影响了机器人使用时的效率。
技术实现思路
1、为了解决上述技术问题之一,本公开提供了一种定位导航机构。
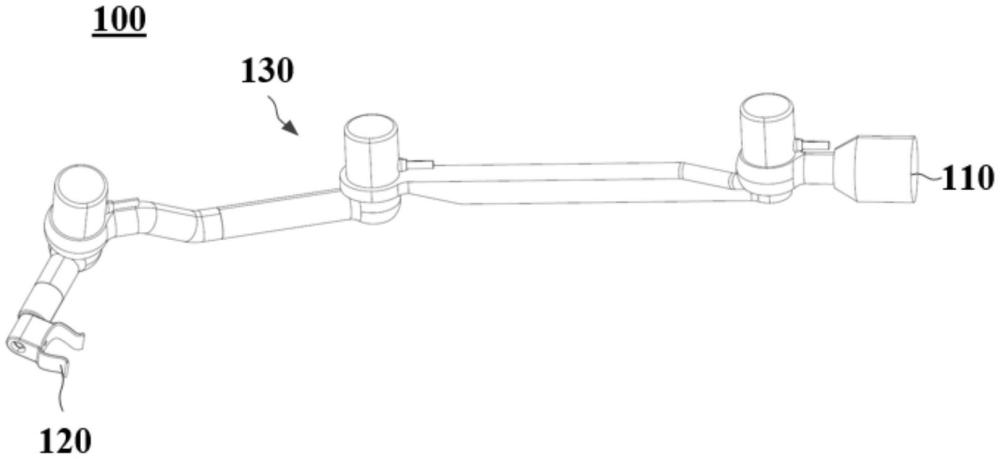
2、根据本公开的一个方面,提供了一种定位导航机构,所述定位导航机构安装于机器人的末端,其包括:
3、固定底座,所述固定底座固定于所述机器人的末端;
4、固定支架,所述固定支架用于保持需定位物体;以及
5、连杆机构,所述连杆机构设置于所述固定底座和固定支架之间,并且所述连杆机构设置有多个编码器,以当连杆机构的各连杆之间的位姿发生变化时,能够通过所述编码器获得固定底座与连杆机构的末端连杆之间的第一相对位姿关系、连杆机构的各连杆之间的第二相对位姿关系以及连杆机构的首端连杆与固定底座之间的第三相对位姿关系,并根据第一相对位姿关系、第二相对位姿关系和第三相对位姿关系,获得固定支架相对于固定底座的三维空间的相对位姿关系。
6、根据本公开的至少一个实施方式的定位导航机构,所述固定支架被设置为相对于末端连杆能够转动,所述编码器中的一个编码器用于检测所述固定支架相对于末端连杆的转动角度。
7、根据本公开的至少一个实施方式的定位导航机构,所述首端连杆被设置为相对于所述固定底座能够转动,所述编码器中的一个编码器用于检测所述固定支架相对于首端连杆的转动角度。
8、根据本公开的至少一个实施方式的定位导航机构,所述连杆机构还包括多个中间连杆,并使得所述连杆机构形成为多自由度串联关节式机器人。
9、根据本公开的至少一个实施方式的定位导航机构,所述固定支架包括卡夹,所述卡夹用于夹取需定位物体。
技术特征:
1.一种定位导航机构,所述定位导航机构安装于机器人的末端,其特征在于,包括:
2.如权利要求1所述的定位导航机构,其特征在于,所述固定支架被设置为相对于末端连杆能够转动,所述编码器中的一个编码器用于检测所述固定支架相对于末端连杆的转动角度。
3.如权利要求1所述的定位导航机构,其特征在于,所述首端连杆被设置为相对于所述固定底座能够转动,所述编码器中的一个编码器用于检测所述固定支架相对于首端连杆的转动角度。
4.如权利要求1所述的定位导航机构,其特征在于,所述连杆机构还包括多个中间连杆,并使得所述连杆机构形成为多自由度串联关节式机器人。
5.如权利要求1所述的定位导航机构,其特征在于,所述固定支架包括卡夹,所述卡夹用于夹取需定位物体。
技术总结
本公开提供一种定位导航机构,其包括:固定底座,所述固定底座固定于所述机器人的末端;固定支架,所述固定支架用于保持需定位物体;以及连杆机构,所述连杆机构设置于所述固定底座和固定支架之间,并且所述连杆机构设置有多个编码器,以当连杆机构的各连杆之间的位姿发生变化时,能够通过所述编码器获得固定底座与连杆机构的末端连杆之间的第一相对位姿关系、连杆机构的各连杆之间的第二相对位姿关系以及连杆机构的首端连杆与固定底座之间的第三相对位姿关系,并根据第一相对位姿关系、第二相对位姿关系和第三相对位姿关系,获得固定支架相对于固定底座的三维空间的相对位姿关系。
技术研发人员:陈兆芃,黎田,李锋,别东洋,董立冰,白宇珅
受保护的技术使用者:北京思灵机器人科技有限责任公司
技术研发日:20230908
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!