一种用于真空无尘机械手的除尘结构的制作方法
本技术涉及晶圆加工,特别是一种用于真空无尘机械手的除尘结构。
背景技术:
1、晶圆机械手是半导体制造过程中不可或缺的设备之一,在晶圆制造过程中,需要多次将晶圆从晶圆匣中取出并送往加工位,加工完成之后再送入晶圆匣中进行存储或转移,以完成半导体芯片位技术。晶圆机械手机械臂的运动是由控制系统控制的,控制系统可以根据预设的程序和指令,精准地控制机械臂的运动轨迹和速度。
2、由于后期加工对晶圆的洁净度有着较高的要求,其洁净度直接决定了良品率的高低,因此晶圆的洁净度在产业化中备受关注。但晶圆结构表面无法用常规接触手段进行清洁,单纯的吹气操作也不能去除顽固灰尘,基于此,提出一种用于真空无尘机械手的除尘结构,来解决上述问题。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种用于真空无尘机械手的除尘结构,有效解决了现有技术的不足。
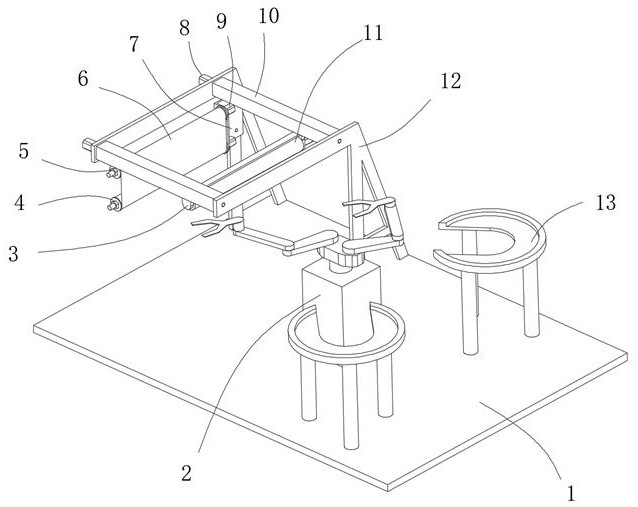
2、为了实现上述目的,本实用新型一方面的实施例提供了一种用于真空无尘机械手的除尘结构,包括底板,所述底板的顶面固定连接有机械手本体和两个工作台,所述底板的一角处固定连接有支撑架,所述支撑架的顶端固定连接有两个导轨,两个所述导轨的内部设置有沿其长度方向进行滑动的滑动架,且其底端转动连接有静电棒,所述支撑架的一侧固定连接有固定板,所述固定板的一侧固定连接有两个第一电机,两者的输出端均固定连接有卷轴,两个所述卷轴的外壁缠绕有吸尘纸,且其外壁涂覆有胶水层。
3、由上述任一方案优选的是,两个所述工作台分别设置在远离至支撑架顶面的两角处,通过使用该方案便于为晶圆提供放置位置,便于通过外部的加工设备,对晶圆进行加工。
4、由上述任一方案优选的是,所述支撑架的底端通过螺栓与底板的一角处固定连接,所述支撑架的一侧固定连接有两个第二电机,且两者输出端均固定连接有丝杆,两个所述丝杆分别与滑动架的两端螺纹连接,该方案便于通过两个第二电机通电运行,带动两个丝杆与滑动架的两端进行相对转动,从而驱动滑动架沿两个导轨的长度方向进行运动,对静电棒的位置进行调节。
5、由上述任一方案优选的是,所述滑动架的一侧固定连接有第三电机,其输出端与静电棒固定连接,该方案通过第三电机通电运行,带动静电棒进行转动,从而使静电棒的外表面覆盖整个晶圆的顶面,同时保证与晶圆的顶面之间留有安全距离,避免两者相接触。
6、由上述任一方案优选的是,所述固定板的外形为l形,所述固定板的一侧通过螺栓与支撑架固定连接,通过使用该方案便于稳定固定板的相对位置,同时为两个第一电机提供安装位置,便于使用者将吸尘纸缠绕在两个第一电机的输出端上,通过两个第一电机运行,使吸尘纸进行传动,从而便于和静电棒相接触,将位置与静电棒外壁上的微尘进行粘附。
7、由上述任一方案优选的是,两个所述第一电机输出端的外形为阶梯状,且两者的端部均螺纹连接有带垫螺母,该方案在进行使用时,可以将吸尘纸缠在中空的塑料卷筒上,通过带垫螺母进行固定,便于后期对吸尘纸进行更换。
8、本实用新型具有以下优点:
9、1、该一种用于真空无尘机械手的除尘结构,通过设置滑动架,并与两个丝杆螺纹连接,通过两个第二电机通电运行,进而驱动静电棒沿两个导轨的长度方向进行运动,接近机械手本体,通过静电棒自身的静电将晶圆上的微尘进行吸附,实现对晶圆进行清理的目的,通过两个第二电机再次运行,驱动静电棒转移并接触吸尘纸,通过两个第一电机通电运行,带动吸尘纸与静电棒之间进行相对滚动,使微尘粘附在胶水层上,使静电棒对晶圆进行再次除尘,有效解决现有技术中所存在的问题。
10、2、该一种用于真空无尘机械手的除尘结构,通过设置滑动架,同时滑动架的一侧固定连接有第三电机,进而通过第三电机通电运行,带动静电棒进行滚动,便于将晶圆的顶面完全覆盖,提高清洁的效果。
技术特征:
1.一种用于真空无尘机械手的除尘结构,其特征在于:包括底板(1),所述底板(1)的顶面固定连接有机械手本体(2)和两个工作台(13),所述底板(1)的一角处固定连接有支撑架(12),所述支撑架(12)的顶端固定连接有两个导轨(10),两个所述导轨(10)的内部设置有沿其长度方向进行滑动的滑动架(3),且其底端转动连接有静电棒(11),所述支撑架(12)的一侧固定连接有固定板(7),所述固定板(7)的一侧固定连接有两个第一电机(9),两者的输出端均固定连接有卷轴(5),两个所述卷轴(5)的外壁缠绕有吸尘纸(6),且其外壁涂覆有胶水层(16)。
2.根据权利要求1所述的一种用于真空无尘机械手的除尘结构,其特征在于:两个所述工作台(13)分别设置在远离至支撑架(12)顶面的两角处。
3.根据权利要求2所述的一种用于真空无尘机械手的除尘结构,其特征在于:所述支撑架(12)的底端通过螺栓与底板(1)的一角处固定连接,所述支撑架(12)的一侧固定连接有两个第二电机(8),且两者输出端均固定连接有丝杆(14),两个所述丝杆(14)分别与滑动架(3)的两端螺纹连接。
4.根据权利要求3所述的一种用于真空无尘机械手的除尘结构,其特征在于:所述滑动架(3)的一侧固定连接有第三电机(15),其输出端与静电棒(11)固定连接。
5.根据权利要求4所述的一种用于真空无尘机械手的除尘结构,其特征在于:所述固定板(7)的外形为l形,所述固定板(7)的一侧通过螺栓与支撑架(12)固定连接。
6.根据权利要求5所述的一种用于真空无尘机械手的除尘结构,其特征在于:两个所述第一电机(9)输出端的外形为阶梯状,且两者的端部均螺纹连接有带垫螺母(4)。
技术总结
本技术涉及晶圆加工技术领域,特别是一种用于真空无尘机械手的除尘结构,包括底板,所述底板的顶面固定连接有机械手本体和两个工作台,所述底板的一角处固定连接有支撑架,所述支撑架的顶端固定连接有两个导轨。本技术的优点在于:通过两个第二电机通电运行,进而驱动静电棒沿两个导轨的长度方向进行运动,接近机械手本体,通过静电棒自身的静电将晶圆上的微尘进行吸附,实现对晶圆进行清理的目的,通过两个第二电机再次运行,驱动静电棒转移并接触吸尘纸,通过两个第一电机通电运行,带动吸尘纸与静电棒之间进行相对滚动,使微尘粘附在胶水层上,使静电棒对晶圆进行再次除尘,有效解决现有技术中所存在的问题。
技术研发人员:蔡燕娇
受保护的技术使用者:深圳市冠乔科技有限公司
技术研发日:20230914
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!