一种基于物联网的工业识别定位装置
本技术涉及物联网识别定位,尤其涉及一种基于物联网的工业识别定位装置。
背景技术:
1、工业是产品加工制造产业,工业是社会分工发展的产物,经过手工业、机器工业几个发展阶段,工业是唯一生产现代化劳动手段的部门,它决定着国民经济现代化的速度、规模和水平,在当代世界各国国民经济中起着主导作用,在工业生产的过程中,一个工件的完成往往需要通过多个不同的零件进行装配,但是传统的零件装配过程,通常采用人工先进行定位再装配,这样不仅降低了工作效率,而且不能保证装配的精确度;
2、现有公告号为:cn213319686u的一种基于物联网的工业识别定位装置,此专利在使用时,将需要夹持固定的圆柱状零件放置在固定盒上的放置腔内,随后启动设备箱内的电机带动螺纹杆进行转动,在螺纹杆转动过程中安装在螺纹杆上的移动板跟随移动从而带动一端上的安装杆推动滚轮移动,此时滚轮将与楔型块剖面接触从而带动楔型块移动,楔型块此时将带动底部上的滑块在支撑杆上滑动,楔型块逐步移动过程中对零件进行夹持固定,松脱时控制反向转动螺纹杆,滑块在弹簧的回弹力下回复到初始位置,但是此专利操作过程中,依旧依靠的是操作人员手动进行启动电机,手动转动螺纹杆,操作起来较为费时费力;
3、因此,有必要提供一种基于物联网的工业识别定位装置解决上述技术问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种基于物联网的工业识别定位装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
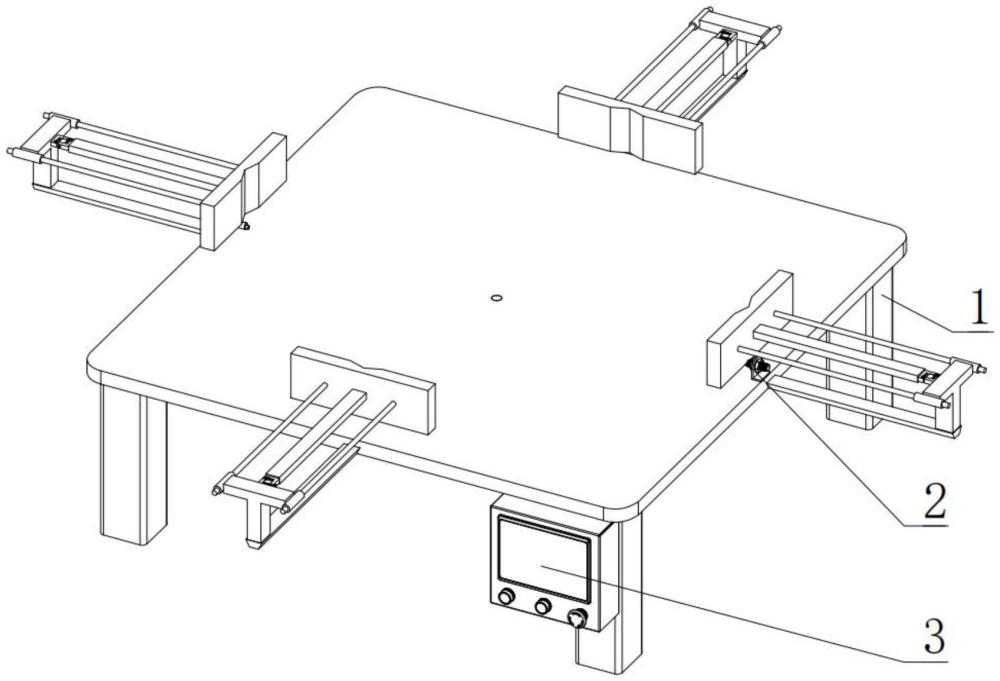
3、一种基于物联网的工业识别定位装置,包括支撑架、对射传感器、控制器、定位模块;
4、其中,所述定位模块包括放置板,所述放置板的下侧固定连接圆轴,电动推杆的壳体一侧铰连接所述圆轴,所述电动推杆的伸缩杆的端部通过销轴铰连接十字形板的下侧,所述十字形板的上侧中部固定连接转轴,所述转轴活动连接所述放置板的中部;
5、所述十字形板的端部分别通过销轴铰连接对应的连杆,一组所述连杆的一端分别通过销轴铰连接对应的梯形滑杆,一组所述梯形滑杆分别设置在对应的梯形滑槽内,一组所述梯形滑槽分别设置在所述放置板的下侧,一组所述梯形滑杆的上侧一端分别固定连接对应的t形板,一组所述t形板的两端分别固定连接对应的一组圆形套筒,对应的一组所述圆形套筒内分别设有对应的圆形导杆,对应的一组所述圆形导杆的一端分别固定连接对应的夹板;
6、一组所述夹板的一侧分别固定连接对应的连板,一组所述连板的一端分别固定连接对应的s型拉压式传感器,一组所述s型拉压式传感器的型号为lfs-02,一组所述s型拉压式传感器的一端分别固定连接在对应的所述t形板的一侧。
7、优选的,所述放置板的上侧两端分别固定连接对称的所述对射传感器。
8、优选的,两个所述对射传感器的型号为hoa1882。
9、优选的,所述放置板的下侧一端固定连接所述控制器。
10、优选的,所述放置板的下侧分别固定连接所述支撑架。
11、与相关技术相比较,本实用新型的有益效果是:把需要定位的工件放置在放置板的上侧,此时两个对射传感器的接收端接收到工件放置的信号,并反馈给控制器一个信号,使控制器控制电动推杆打开,通过定位模块,使一组夹板接触到工件,此时在一组夹板对工件夹持的过程中,传递给s型拉压式传感器一组反作用力,使四个s型拉压式传感器感受到压力,此时一组s型拉压式传感器的压力值传递给控制器,使控制器接收到工件被夹持的信号,此时控制器控制电动推杆关闭,使一组夹板对工件完成定位操作。
技术特征:
1.一种基于物联网的工业识别定位装置,其特征在于,该基于物联网的工业识别定位装置包括:
2.根据权利要求1所述的一种基于物联网的工业识别定位装置,其特征在于,所述放置板(513)的上侧两端分别固定连接对称的所述对射传感器(2)。
3.根据权利要求2所述的一种基于物联网的工业识别定位装置,其特征在于,两个所述对射传感器(2)的型号为hoa1882。
4.根据权利要求1所述的一种基于物联网的工业识别定位装置,其特征在于,所述放置板(513)的下侧一端固定连接所述控制器(3)。
5.根据权利要求1所述的一种基于物联网的工业识别定位装置,其特征在于,所述放置板(513)的下侧分别固定连接所述支撑架(1)。
技术总结
本技术公开了一种基于物联网的工业识别定位装置,包括支撑架、对射传感器、控制器、定位模块;其中,所述定位模块包括放置板,所述放置板的下侧固定连接圆轴。本技术把需要定位的工件放置在放置板的上侧,此时两个对射传感器的接收端接收到工件放置的信号,并反馈给控制器一个信号,使控制器控制电动推杆打开,通过定位模块,使一组夹板接触到工件,此时在一组夹板对工件夹持的过程中,传递给S型拉压式传感器一组反作用力,使四个S型拉压式传感器感受到压力,此时一组S型拉压式传感器的压力值传递给控制器,使控制器接收到工件被夹持的信号,此时控制器控制电动推杆关闭,使一组夹板对工件完成定位操作。
技术研发人员:张远琦,姜晓琳,亓越,石佳,张杰,于淑艳
受保护的技术使用者:山东商业职业技术学院
技术研发日:20231009
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!