机器人多拧紧轴套筒自动切换系统的制作方法
本技术涉及工程机械工艺装备,特别涉及一种机器人多拧紧轴套筒自动切换系统。
背景技术:
1、现有技术中,在进行套筒切换时,都是人工手动更换套筒,耗时较长,且操作不便;人工作业,现场容易杂乱无序,劳动强度高,且存在安全问题。
技术实现思路
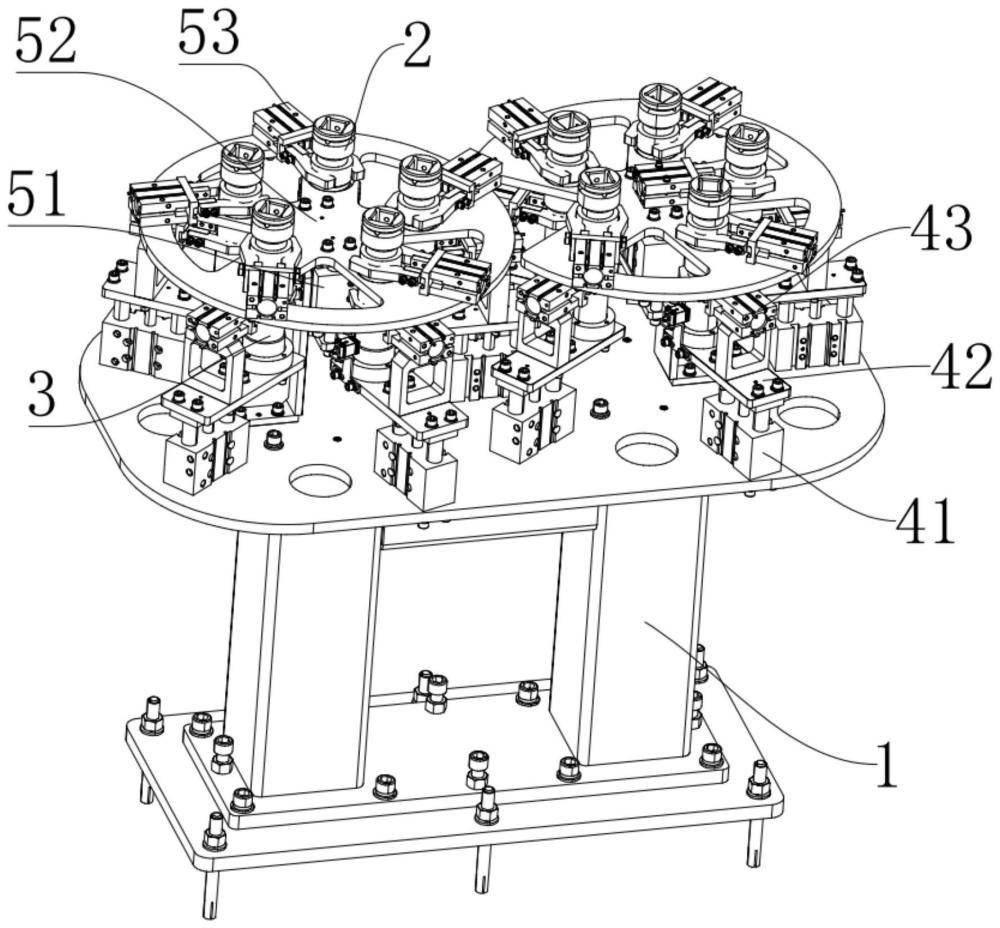
1、根据本实用新型实施例,提供了一种机器人多拧紧轴套筒自动切换系统,包含:支撑台、嵌入模块、分离模块和驱动模块;
2、嵌入模块和分离模块设置在支撑台上;
3、驱动模块的输出端设置有若干拧紧轴,拧紧轴设置有夹具,夹具夹紧套筒,驱动模块驱动夹具移动;
4、嵌入模块与夹具相衔接,嵌入模块驱动套筒嵌入至夹具内;
5、分离模块设置在嵌入模块和夹具之间,分离模块分离夹具和套筒。
6、进一步,嵌入模块包含:升降气缸、连接板和第一夹爪气缸;
7、升降气缸设置在支撑台上,升降气缸的驱动端与连接板相连,驱动连接板上下移动;
8、套筒放置在连接板上;
9、第一夹爪气缸固定在连接板上,夹紧固定套筒。
10、进一步,分离模块包含:顶升气缸、顶升板和第二夹爪气缸;
11、顶升气缸设置在支撑台上,顶升气缸的驱动端与顶升板相连,驱动顶升板上下移动;
12、第二夹爪气缸固定在顶升板上,夹紧固定夹具。
13、进一步,顶升板上设有容纳孔,容纳孔的内径大于套筒的外径。
14、进一步,夹具包含:
15、夹紧组件,夹紧组件套设在套筒顶部,夹紧套筒;
16、切换组件,切换组件套设在夹紧组件上,切换组件驱动夹紧组件夹紧或松开套筒。
17、进一步,夹紧组件包含:
18、固定筒,固定筒底部设有固定孔,套筒插入固定孔内固定;
19、若干夹紧珠,若干夹紧珠环绕设置在固定筒的筒壁上,若干夹紧珠所在平面垂直于固定筒的长度方向。
20、进一步,切换组件包含:
21、上盖,上盖固定在固定筒上;
22、下盖,下盖可滑动地套设在固定筒上;
23、弹簧,弹簧套设在固定筒上,弹簧的两端分别与上盖和下盖相抵接。
24、进一步,下盖内壁设有容纳槽,容纳槽为环形斜槽,容纳槽的内径由上往下依次增加,容纳槽容纳夹紧珠。
25、根据本实用新型实施例的机器人多拧紧轴套筒自动切换系统,能够改善生产环境,提高劳动生产率,提升装配效率,降低成本,提高安全性。
26、要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并且意图在于提供要求保护的技术的进一步说明。
技术特征:
1.一种机器人多拧紧轴套筒自动切换系统,其特征在于,包含:支撑台、嵌入模块、分离模块和驱动模块;
2.如权利要求1所述机器人多拧紧轴套筒自动切换系统,其特征在于,所述嵌入模块包含:升降气缸、连接板和第一夹爪气缸;
3.如权利要求1所述机器人多拧紧轴套筒自动切换系统,其特征在于,所述分离模块包含:顶升气缸、顶升板和第二夹爪气缸;
4.如权利要求3所述机器人多拧紧轴套筒自动切换系统,其特征在于,所述顶升板上设有容纳孔,所述容纳孔的内径大于所述套筒的外径。
5.如权利要求1所述机器人多拧紧轴套筒自动切换系统,其特征在于,所述夹具包含:
6.如权利要求5所述机器人多拧紧轴套筒自动切换系统,其特征在于,所述夹紧组件包含:
7.如权利要求6所述机器人多拧紧轴套筒自动切换系统,其特征在于,所述切换组件包含:
8.如权利要求7所述机器人多拧紧轴套筒自动切换系统,其特征在于,所述下盖内壁设有容纳槽,所述容纳槽为环形斜槽,所述容纳槽的内径由上往下依次增加,所述容纳槽容纳所述夹紧珠。
技术总结
本技术公开了一种机器人多拧紧轴套筒自动切换系统,包含:支撑台、嵌入模块、分离模块和驱动模块;嵌入模块和分离模块设置在支撑台上;驱动模块的输出端设置有若干拧紧轴,拧紧轴设置有夹具,夹具夹紧套筒,驱动模块驱动夹具移动;嵌入模块与夹具相衔接,嵌入模块驱动套筒嵌入至夹具内;分离模块设置在嵌入模块和夹具之间,分离模块分离夹具和套筒。本技术能够改善生产环境,提高劳动生产率,提升装配效率,降低成本,提高安全性。
技术研发人员:李天栋
受保护的技术使用者:上海君屹工业自动化股份有限公司
技术研发日:20231012
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!