风力发电机塔身原位检测攀爬机器人
本技术属于攀爬机器人,特别涉及一种风力发电机塔身原位检测攀爬机器人。
背景技术:
1、在双碳战略目标的大背景下,风能作为一种清洁可再生的绿色资源,对于减少碳排放、缓解温室效应、促进环境和经济社会的健康可持续发展具有重要作用。伴随着风电产业的高速发展,对风力发电机的核心要求是更高的发电效率和更少的维护成本。目前,中国在役风力发电机数量巨大且服役多年,风机能否在运转时期发挥最佳性能是衡量发电效率的关键因素之一。因此,对在役风力发电机生命周期内的运营维护将是我们面临的巨大挑战。
2、风力发电机的核心零部件包括叶片、塔筒、发电机、齿轮箱、轴承、轮毂等。在风力发电机结构中,塔筒起到承载支撑机舱中关键零部件载荷的作用。塔筒为变节径、变厚度的空心筒状结构,一般为三段式结构,即下塔筒段、中塔筒段、上塔筒段,筒段与筒段之间通过法兰和螺栓连接。一旦塔筒出现结构失效问题,整台风力发电机可能发生倒塌现象,造成不可逆转的损失。
3、现代兆瓦级风机的塔身整体高度一般都超过了80m,常见塔身的高度为120m,且高度呈连年增长的趋势,但高塔身也有其不可避免的弊端,其结构的静强度较低,受载后变形量较大。风机塔身虽然在出厂前经过严格的质量检测,但塔身表面以下还是会存在一些天然结构缺陷,例如,细微孔隙、细微裂纹等。这些疲劳裂纹如果不能被及时检测进行相应检修,将会导致风机倒塔事故,直接危及人民生命的财产安全。此外,风力发电机工作环境比较差,风沙磨损、海水潮气腐蚀等一直威胁着风力发电机的正常工作,风机发电过程中易受到工作载荷和外界环境的影响而出现故障,尤其是风机塔身。塔身在如此复杂的载荷作用下,容易产生疲劳裂纹,疲劳裂纹容易继续扩展发生塔身失稳,一旦塔身发生失稳现象,将导致塔筒整体倒塌或局部折断,风机整机受到破坏。塔身由于制造、装配等过程存在问题,以及长时间使用后塔身疲劳,容易出现塔身裂纹、表面锈蚀等状况,不及时实施对应检修措施将会引发塔身塌毁严重事故,一旦风机塔身出现故障将造成无法挽回的经济损失甚至造成安全事故,并且发电设备后期的维修费用十分昂贵。
4、目前风电企业对风力发电机塔身的检测方式主要是通过人工检测和无人机检测进行的,但是这两种常规的检测方式均存在明显缺陷。首先,人工检测是检测人员在高空下作业,环境恶劣、危险程度极高,容易发生安全事故,会对检测人员造成生命威胁。无人机检测无法检测到塔身内部早期疲劳裂纹,这会导致早期疲劳裂纹在日后巨大复杂的力矩下快速扩展,造成倒塔事故,造成巨大经济损失。
5、因此,本实用新型专利提出了一种风力发电机塔身原位检测攀爬机器人,旨在降低人工高空作业的风险,降低风机运维成本,发现塔身材料内部早期裂纹,采取相应的补救措施,延长风机使用寿命,避免发生风机倒塔事故。
技术实现思路
1、针对上述技术问题,本实用新型的目的是提供一种风力发电机塔身原位检测攀爬机器人,实现了稳定吸附在风力发电机塔身上,并且在塔身表面自由攀爬移动,通过机械臂控制超声探头的运动对塔身进行检测,实现在塔身表面的原位检测作业。
2、为了实现上述目的,本实用新型提供了如下技术方案:
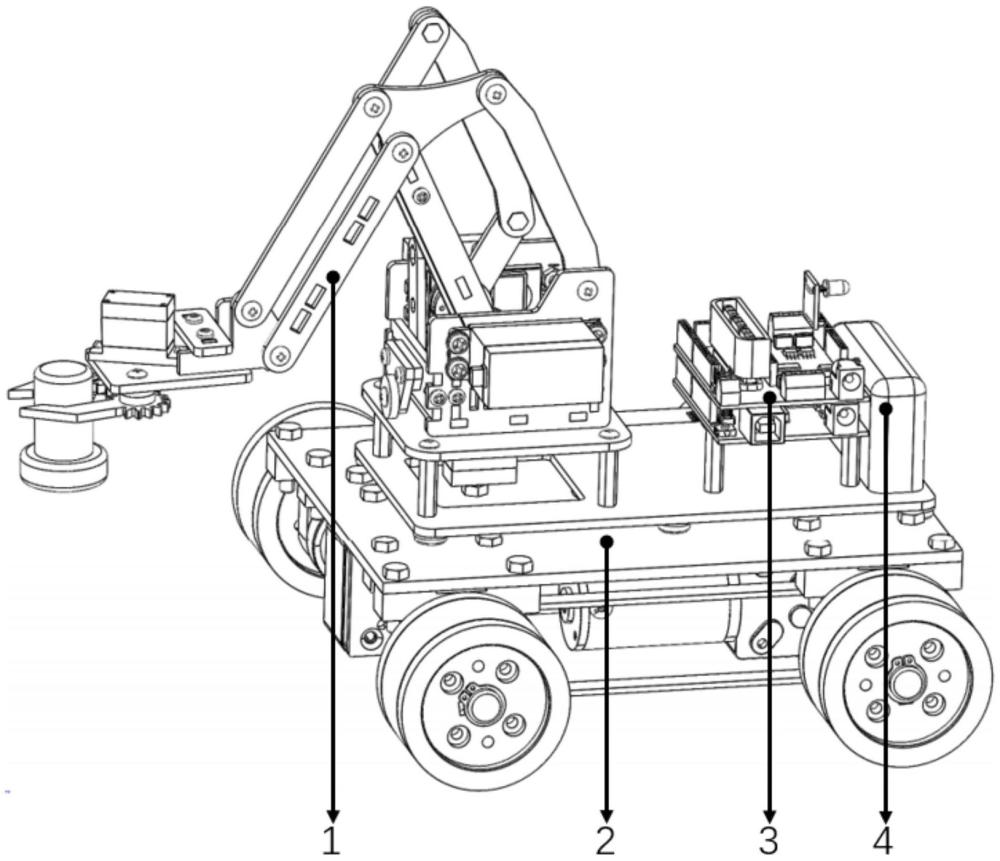
3、一种风力发电机塔身原位检测攀爬机器人,包括检测执行装置1、自由移动装置2、控制系统3与电源4;
4、所述检测执行装置1固定在自由移动装置2的底盘14上,包括超声探头5、转台电机6、转台7、大臂电机8、大臂9、小臂电机10、小臂11、爪头电机12、爪头13。
5、所述检测执行装置1通过转台电机6连接转台7实现大臂9、小臂11、爪头13的左右圆周运动,从而实现超声探头5的水平面运动;小臂电机10驱动小臂11转动和大臂电机8驱动大臂9转动共同实现爪头13的前后上下运动,从而实现超声探头5的垂直面运动;爪头电机12驱动爪头13实现超声探头5的夹紧与放松。
6、所述自由移动装置2包括底盘14、电机15、减速器16、联轴器17、主动轴18、主动同步带轮19、主动轴轴承座20、主动轴磁轮21、同步带22、从动同步带轮23、从动轴24、从动轴轴承座25、从动轴磁轮26。
7、所述自由移动装置2的电机15和减速器16固定在底盘14上,电机15与减速器16连接,减速器16通过联轴器17与主动轴18连接,主动同步带轮19与主动轴18通过键连接,主动轴18通过主动轴轴承座20实现周向固定,主动轴轴承座20固定在底盘14上,主动轴18与主动轴磁轮21通过键连接,主动同步带轮19与从动同步带轮23通过同步带22连接,从动同步带轮23与从动轴24通过键连接,从动轴24通过从动轴轴承座25实现周向固定,从动轴轴承座25固定在底盘14上,从动轴24与从动轴磁轮26通过键连接。
8、所述控制系统3通过控制板对检测执行装置1和自由移动装置2进行控制,位于机器人后端,固定在底盘14上;所述电源4为检测执行装置1和自由移动装置2供能,固定在底盘14上。
9、所述自由移动装置2采用左右180度反转对称紧凑式模块化设计,同侧前后两轮同步驱动设计,电机15输出动力经过减速器16和连轴器17带动主动轴18、主动同步带轮19和主动轴磁轮21旋转,同时通过同步带22带动从动轴24、从动同步带轮23和从动轴磁轮26旋转,另一侧同理,从而实现自由移动平台的移动。所述自由移动装置2的电机15与其左右180度反转对称侧电机转速相同,转动方向相反时,实现自由移动装置2直线运行,两侧电机停止转动时,实现自动移动装置1静止,否则,实现自由移动装置2转向。所述主动轴18与主动同步带轮19通过键连接,从动轴24与从动同步带轮23通过键连接,主动轴18与从动轴24之间的动力通过同步带22传递,主动轴18和从动轴24通过轴承座固定。
10、所述超声探头5通过爪头13夹紧与放松。
11、所述控制系统3与电源4位于机器人后端。
12、与现有技术相比,本实用新型的有益效果在于:
13、本实用新型的风力发电机塔身原位检测攀爬机器人,应用强磁轮式吸附方式,磁力吸附安全可靠,结构简单,适用于风力发电机塔身表面材质,使机器人能够磁性材料在如风力发电机塔身表面以及其他磁性介质的水平垂直面进行攀爬作业。应用左右180度反转对称紧凑式模块化设计,同侧前后两轮同步驱动设计,并且缩短产品开发周期,提高产品开发效率。扁平化设计使机器人底盘利用率高,整机高度低。提出机器人针对风力发电机塔身代替人工和无人机进行检测,本项目可广泛应用于风力发电机的运营与维护工作,通过搭载超声波探伤器等设备进行作业。
技术特征:
1.一种风力发电机塔身原位检测攀爬机器人,其特征在于,包括检测执行装置(1)、自由移动装置(2)、控制系统(3)与电源(4);
2.根据权利要求1所述的风力发电机塔身原位检测攀爬机器人,其特征在于,所述自由移动装置(2)采用左右180度反转对称紧凑式模块化设计,同侧前后两轮同步驱动设计,电机(15)输出动力经过减速器(16)和联轴器(17)带动主动轴(18)、主动同步带轮(19)和主动轴磁轮(21)旋转,同时通过同步带(22)带动从动轴(24)、从动同步带轮(23)和从动轴磁轮(26)旋转,另一侧同理,从而实现自由移动装置(2)的移动。
3.根据权利要求1所述的风力发电机塔身原位检测攀爬机器人,其特征在于,所述自由移动装置(2)的电机(15)与其左右180度反转对称侧电机转速相同,转动方向相反时,实现自由移动装置(2)直线运行,两侧电机停止转动时,实现自由移动装置(2)静止,否则,实现自由移动装置(2)转向。
4.根据权利要求1所述的风力发电机塔身原位检测攀爬机器人,其特征在于,所述主动轴(18)与主动同步带轮(19)通过键连接,从动轴(24)与从动同步带轮(23)通过键连接,主动轴(18)与从动轴(24)之间的动力通过同步带(22)传递,主动轴(18)和从动轴(24)通过轴承座固定。
5.根据权利要求1所述的风力发电机塔身原位检测攀爬机器人,其特征在于,所述超声探头(5)通过爪头(13)夹紧与放松。
6.根据权利要求1所述的风力发电机塔身原位检测攀爬机器人,其特征在于,所述控制系统(3)与电源(4)位于机器人后端。
技术总结
本技术涉及一种风力发电机塔身原位检测攀爬机器人,包括检测执行装置、自由移动装置、控制系统与电源;检测执行装置包括超声探头、转台电机、转台、大臂电机、大臂、小臂电机、小臂、爪头电机、爪头;自由移动装置包括底盘、电机、减速器、联轴器、主动轴、主动同步带轮、主动轴轴承座、主动轴磁轮、同步带、从动同步带轮、从动轴、从动轴轴承座、从动轴磁轮;控制系统通过控制板对检测执行装置和自由移动装置进行控制;电源为电机与控制板供能。本技术实现了稳定吸附在风力发电机塔身上,并且在塔身表面自由攀爬移动,通过机械臂控制超声探头的运动对塔身进行检测,实现在塔身表面的原位检测作业。
技术研发人员:殷成刚,姚成,赖贤政,曹恺恒,肖熙泓
受保护的技术使用者:中国农业大学
技术研发日:20231011
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!