一种输水隧洞水下检测机器人及使用方法与流程
本发明属于隧洞水下检测,尤其涉及一种输水隧洞水下检测机器人及使用方法。
背景技术:
1、当前输水隧洞作为水利工程常用的输水方式,对城市生活用水的保障极为重要。
2、但隧洞在运行一定时间后,将会出现裂缝、坍塌等缺陷与损坏,因此需定期对输水隧洞进行安全检测与评价。同时生活用水对于城市来说极为重要,一旦停水将会不仅给城市居民带来极大不便,也将带来恐慌,不是万不得已情况下,不能停止城市供水。在不影响供水或者影响很小的情况下,进行输水隧洞裂缝等缺陷检测是输水隧洞检测的发展方向。
3、在不停水情况下进行输水隧洞检测可以有两种方式。一是利用遥控式有缆机器人检测。该种方式,可以实时获得相应检测图像与数据,但脐带缆是一个羁绊,容易与洞壁摩擦刮碰发生缠绕与断裂,因供电等原因脐带缆也无法太长,距离非常有限。二是利用无缆自主式机器人系统进行输水隧洞缺陷检测。这种智能化的无人水下机器人更能高可靠、高效率地完成输水隧洞的检测,已成为输水隧洞检测发展趋势。
4、而现有的无缆自主式机器人拍摄隧洞洞壁的照片时,存在一些问题:由于无缆自主式机器人为悬浮结构,因为拍摄洞壁时每次拍摄的照片都不稳定,并且会受到水体内的杂物干扰,这大大降低了检测的效率与准确性。
技术实现思路
1、本发明的目的是提供一种输水隧洞水下检测机器人及使用方法,以解决上述问题,达到更好地实现检测与拍摄,能够清楚地获得隧洞洞壁的图像的目的。
2、为实现上述目的,本发明提供了如下方案:
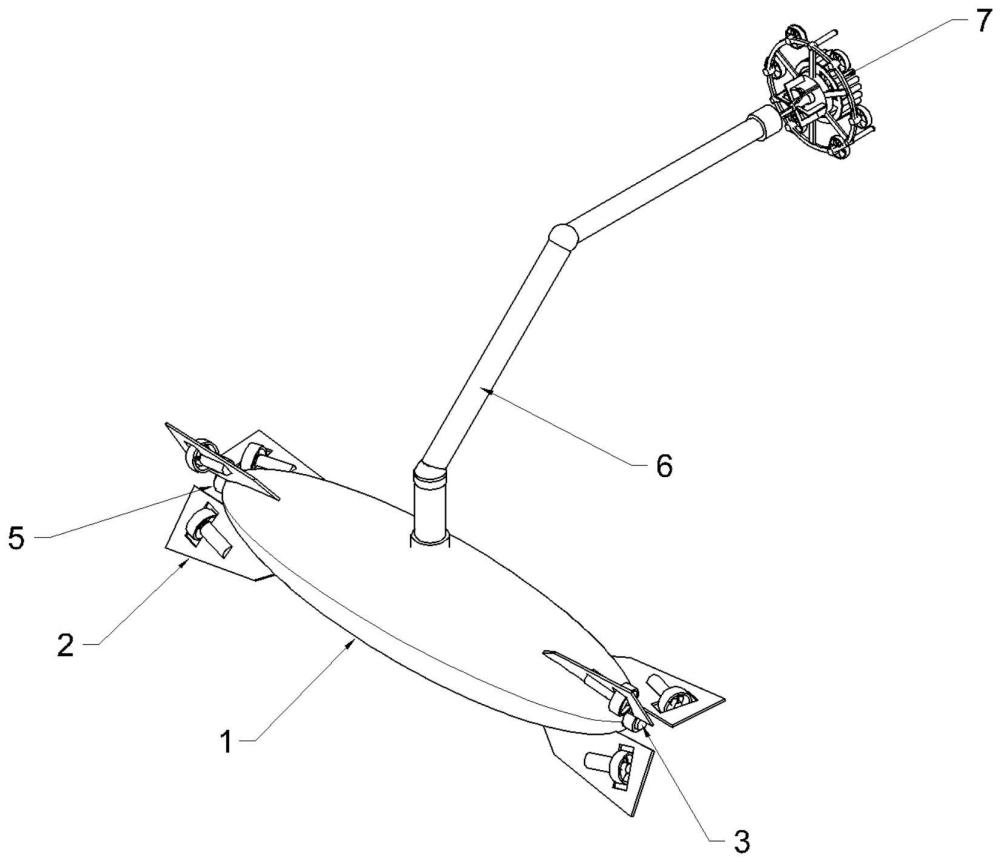
3、一种输水隧洞水下检测机器人,包括:外壳,所述外壳前端固定连接有多波束声纳,所述外壳后端固定连接有测距声纳,所述外壳前后两端均设有机器人驱动结构,所述外壳顶端固定连接有万向机械臂的固定端,所述万向机械臂的活动端设有检测头结构;所述外壳内设有电控处理单元;
4、所述外壳底端固定连接有滤网结构,所述外壳内侧固定连接有水泵,所述水泵的进水端设于所述滤网结构内侧,所述水泵的出水端通过输水管与所述检测头结构固定连通;所述机器人驱动结构、万向机械臂、水泵与所述电控处理单元电性连接。
5、优选的,所述电控处理单元包括从前至后依次固定连接有多束波声呐处理器、浮力材、电源、控制系统、测距声呐处理器,所述多波束声纳与所述多束波声呐处理器电性连接,所述测距声纳与所述测距声呐处理器电性连接;
6、所述测距声呐处理器、多束波声呐处理器、机器人驱动结构、万向机械臂、检测头结构、水泵均与所述电源、控制系统电性连接。
7、优选的,所述机器人驱动结构包括两组稳定翼组,每组稳定翼组包括若干稳定翼,一组稳定翼组中的若干所述稳定翼与所述外壳前端固定连接,另一组稳定翼组中的若干所述稳定翼与所述外壳前端固定连接,若干所述稳定翼沿所述外壳的轴线等间隔设置,所述稳定翼内侧固定连接有动力电机,所述动力电机的输出轴轴接有驱动叶轮,所述动力电机与所述电源、控制系统电性连接。
8、优选的,所述检测头结构包括固定座,所述固定座靠近所述万向机械臂的一端固定连接有释放结构的活动端,所述释放结构的固定端与所述万向机械臂的活动端固定连接,所述固定座外侧固定连接有稳定结构,所述固定座内侧转动连接有毛刷结构,所述毛刷结构传动连接有动力结构,所述动力结构与所述固定座固定连接,所述固定座远离所述万向机械臂的一端固定连接有出水摄像结构,所述出水摄像结构与所述输水管远离所述水泵的一端固定连通;
9、所述稳定结构、释放结构、动力结构、出水摄像结构与所述电源、控制系统电性连接。
10、优选的,所述固定座包括固定柱,所述动力结构与所述固定柱固定连接,所述固定柱靠近所述万向机械臂的一端与所述释放结构的活动端固定连接,所述出水摄像结构设于所述固定柱远离所述万向机械臂的一端,所述固定柱外侧通过连接板固定连接有齿圈座,所述毛刷结构与所述齿圈座内侧转动连接,所述毛刷结构与动力结构啮合;所述稳定结构与所述齿圈座外侧固定连接;
11、所述释放结构包括释放电机,所述释放电机与所述万向机械臂远离所述外壳的一端固定连接,所述释放电机的输出端通过连接绳与所述固定柱连接;
12、所述释放电机与所述电源、控制系统电性连接。
13、优选的,所述稳定结构包括固定环,所述固定环与所述齿圈座外侧固定连接,所述固定环上沿周向等间距固定连接有若干个维稳马达,所述维稳马达的输出轴轴接有维稳叶轮,所述维稳叶轮的轴线与所述固定环垂直;
14、所述固定环上沿周向等间距固定连接有若干个接触检测座,所述接触检测座的远离所述万向机械臂的一侧固定连接有接触支脚,所述接触支脚的轴线与所述固定环垂直;
15、所述维稳马达、接触检测座与所述电源、控制系统电性连接。
16、优选的,所述毛刷结构包括空心太阳轮,所述空心太阳轮穿设于所述齿圈座内侧,所述空心太阳轮位于所述齿圈座外侧的部分轴接有从动空心齿轮,所述空心太阳轮、从动空心齿轮套设于所述固定柱的外侧,所述从动空心齿轮与所述动力结构传动连接,所述空心太阳轮与所述齿圈座之间啮合有若干个行星轮,若干个所述行星轮转动连接有同一行星架,所述行星架远离所述齿圈座的一侧沿周向固定连接有若干个粗毛刷。
17、优选的,所述动力结构包括主动齿轮,所述主动齿轮轴接有动力马达的输出轴,所述动力马达与所述固定柱固定连接,所述主动齿轮与所述从动空心齿轮啮合;
18、所述动力马达与所述电源、控制系统电性连接。
19、优选的,所述出水摄像结构包括摄像头,所述摄像头与所述固定柱远离所述释放结构的一端固定连接,所述摄像头周侧固定连接有若干个照明灯,所述摄像头周侧设有若干个出水管,所述出水管与所述输水管固定连通;
20、所述摄像头、照明灯与所述电源、控制系统电性连接。
21、一种输水隧洞水下检测机器人的使用方法,包括:
22、s1、释放外壳,利用机器人驱动结构驱动外壳移动至待测位置;
23、s2、控制万向机械臂运动,驱使检测头结构对准需要检测的隧洞洞壁;
24、s3、检测头结构对待测部位进行检测。
25、与现有技术相比,本发明具有如下优点和技术效果:
26、通过设置多波束声纳,可以确保外壳能够在水体内正常地运行,对空间内的杂物与障碍进行规避,利用声呐的方式检测隧洞结构中的缺陷。通过设置测距声纳可以对外壳后方的空间进行扫描测距,检测行进的距离,可以对多波束声纳的探测进行补充验证,增加装置整体的可靠性。
27、通过设置万向机械臂,可以很灵活地在水中将检测头结构对准需要拍摄检测的位置,检测头结构在贴近隧洞洞壁后,通过水泵泵缓慢出干净的水,让图像能够更加清晰,此时进行拍摄,可以获取性能良好的图像。
28、本发明中设置了检测头结构,利用检测头结构的结构设置,可以让水下机器人在移动的过程中,可以对隧洞洞壁进行清晰准确地拍摄,这种拍摄不会因为水下机器人的移动而发生明显的晃动进而影响照片的质量,可以实现良好的拍摄。
29、利用这些方案的设置,本发明实现了一种能够灵活地实现检测与拍摄,清楚地获得隧洞洞壁的图像的输水隧洞水下检测机器人及使用方法。
- 还没有人留言评论。精彩留言会获得点赞!