一种多形式搬运机械手装置
本发明涉及机械手,具体为一种多形式搬运机械手装置。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,它主要由执行机构、驱动机构和控制系统三大部分组成,机械手可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点;
2、1、在公开号为cn113547532a的一种物料搬运机械手装置中,其中,包括底座,所述底座上固定连接有底盘电机,所述底座上设置有角度传感器,所述底盘电机的输出轴上固定连接有升降机构。其有益效果是,该物料搬运机械手装置,通过升降机构的设置,可以对气动手指的高度进行调节,且在第一距离传感器的作用下,可以对调节的高度进行控制,在移动机构的作用下,可以对气动手指的横向位置进行调节,且在第二距离传感器的作用下,可以对气动手指的移动位置进行控制,在第一支撑板、第二支撑板、重力传感器和活动架等的共同作用下,可以对气动手指所抓取的物料重量进行测量,且在报警器的作用下,对超过预设范围的物料进行报警;上述现有技术在使用时,仅能进行高度和水平方向的位置调节,单次仅能进行单一位置的物料抓取,并且单次抓取时仅能进行单一方向和位置的物料抓取,导致在实际使用时,若需要进行多方向和位置的物料进行抓取时,需要多次操作装置进行物料的抓取,导致装置的使用的范围受限,继而降低了装置的工作效率,因此,需要进行相应的改进;
3、2、在公开号为cn112497242a的一种物流搬运机械手的抓取装置中,涉及物流搬运技术领域,解决了现在的物流搬运机械手抓取装置的大行程电动缸使用成本高,夹紧容易过度造成纸箱变形的问题,包括顶板;所述二号上支撑杆的右侧固定连接有前后对称的两个连接块;两和所述连接块的底部固定连接有一根二号连接杆;所述一号连接杆和二号连接杆的底部均固定连接有一组连接架;两组所述连接架的底部一侧均滑动连接有六根导杆,且两组连接架底部的六根导杆另一端分别与两块夹板的一侧固定连接。本装置能够适应与宽度较大的纸箱,本装置夹板的位置调节通过螺杆和一个短行程电动缸即可完成,主夹持部分仅需使用短行程电动缸带动,电动缸的使用成本将会大大降低;上述现有技术在使用时,主要通过电机、螺杆的配合使夹板做抓夹工作,但是其在使用时,依然具有一定的局限性,即在抓夹作业中缺乏相应的坠落防护设计,其在进行物料抓夹时缺乏底部的承托设计,因此,物料的整体着力点在两侧的夹板上,由物料重量影响,可能出现物料滑脱的情况,继而容易对物料造成损伤,并且还可能砸伤工作人员,具有一定的安全隐患,因此,需要进行相应的改进。
技术实现思路
1、本发明的目的在于提供一种多形式搬运机械手装置,以解决上述背景技术提出的现有的机械手装置使用功能单一,单次仅能进行单一物料的抓取,并且单次仅能进行单一位置的物料搬运的问题。
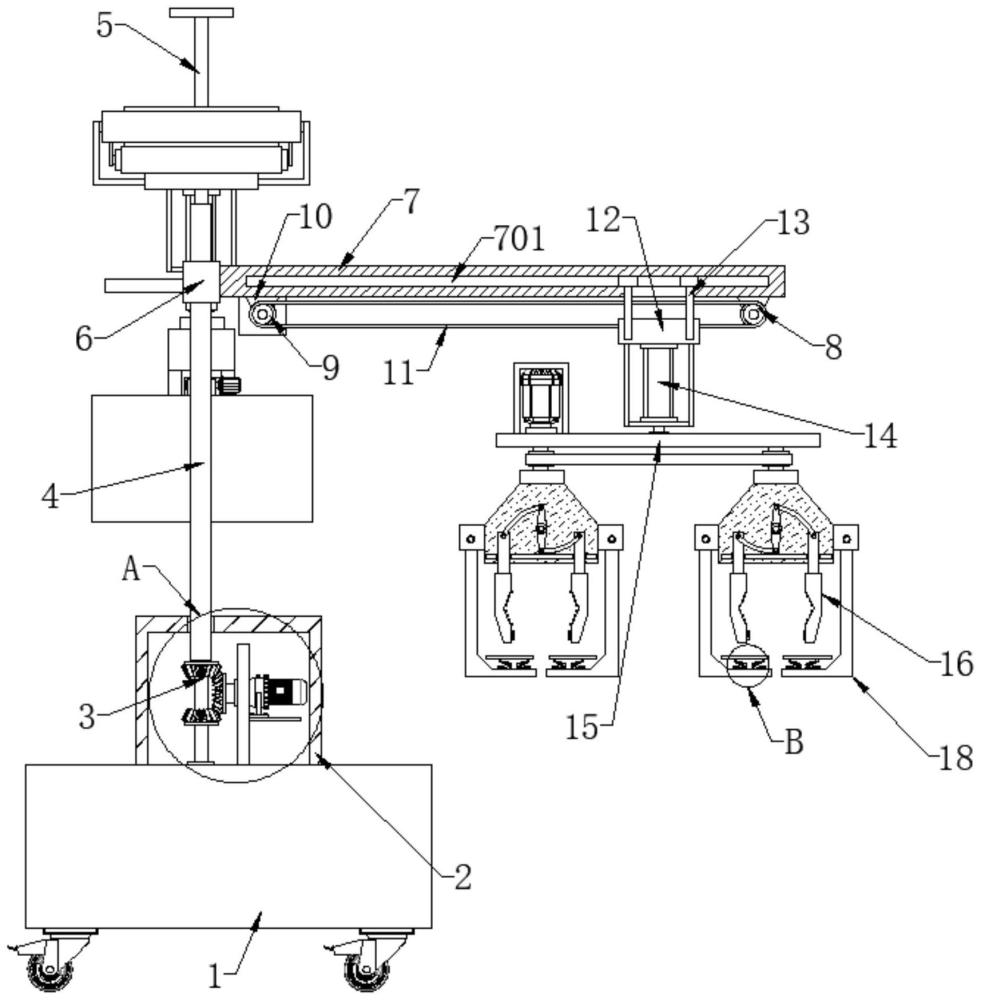
2、为实现上述目的,本发明提供如下技术方案:一种多形式搬运机械手装置,包括移动座,移动座底端的两侧均安装有自锁轮,所述移动座通过自锁轮进行位置移动,所述移动座的顶端安装有防护箱;
3、所述防护箱的内部设置有多向转动机构,所述多向转动机构的顶端安装有第二转轴,且第二转轴的内部贯穿有第一转轴,所述第一转轴和第二转轴的外侧均套接有套块,且套块的一侧均安装有横置架,所述横置架底端的一侧安装有主转轮,所述横置架底端的另一侧安装有导向轮,且导向轮和主转轮之间连接有移动带,所述主转轮的一侧安装有驱动电机,所述移动带的外侧套接有横向移块,且横向移块的底端安装有电动推杆,所述电动推杆的底端安装有升降板,且升降板的底端设置有调向机构,所述调向机构底端的两侧均设置有抓夹机构,且抓夹机构的两侧均设置有防护机构。
4、进一步优化本技术方案,所述多向转动机构包括支板、旋转电机、连接轴、主齿轮、第一齿轮、第二齿轮;
5、支板,安装于移动座的顶端;
6、旋转电机,安装能与支板的一侧,用于多向转动机构的驱动;
7、连接轴,安装于旋转电机的一端;
8、主齿轮,安装于连接轴的一端;
9、第一齿轮,啮合于主齿轮的底端的一侧,所述第一齿轮和主齿轮啮合连接;
10、第二齿轮,啮合于主齿轮顶端的一侧,所述第二齿轮和主齿轮啮合连接。
11、进一步优化本技术方案,所述第一齿轮和第二齿轮转向相反,所述第一齿轮的内部贯穿有第一转轴,所述第二转轴的底端与第二齿轮的顶端相连接。
12、进一步优化本技术方案,所述横置架的外侧设置有限位槽,所述横向移块的两侧均安装有连接架,且连接架的一端均延伸至限位槽中,所述连接架在限位槽的内部滑动。
13、进一步优化本技术方案,所述调向机构包括主电机、主轴、副轴、皮带组件;
14、主电机,安装于升降板顶端的一侧,用于调向机构的驱动;
15、主轴,安装于主电机的底端;
16、副轴,安装于升降板底端的一侧,所述主轴和副轴分布在同一条直线上;
17、皮带组件,连接于主轴和副轴之间。
18、进一步优化本技术方案,所述皮带组件包括主动轮、从动轮和传动带,所述主动轮和从动轮分别套接在主轴和副轴上,所述主动轮和从动轮之间连接有传动带,所述主轴和副轴通过皮带组件做同向转动。
19、进一步优化本技术方案,所述抓夹机构包括抓夹座、自锁电机、中心轴、转架、弧形拉杆、活动块、夹持臂、防滑凸起、支撑槽;
20、抓夹座,设置有两组,分别安装于主轴和副轴的底端;
21、自锁电机,安装于抓夹座背面的一侧,所述自锁电机用于抓夹机构的驱动;
22、中心轴,安装于自锁电机的一端;
23、转架,套接在中心轴的外侧;
24、弧形拉杆,设置有两组,分别套接在转架的两端;
25、活动块,连接于弧形拉杆的一端,所述弧形拉杆的一端与活动块活动连接;
26、夹持臂,安装于活动块的一端,一侧设置有截面为三角形的凹槽,所述夹持臂的一侧安装有按压开关;
27、防滑凸起,设置有多组,截面为半圆形,均匀安装于夹持臂上凹槽中;
28、支撑槽,截面为矩形,设置于抓夹座的两侧。
29、进一步优化本技术方案,所述活动块通过滑块在支撑槽的内部滑动,所述活动块通过滑块和支撑槽与抓夹座组成滑动连接。
30、进一步优化本技术方案,所述防护机构包括u型架、驱动马达、防护罩、钢板、缓冲板、缓震弹簧;
31、u型架,设置有两组,分别安装于抓夹座的两侧;
32、驱动马达,安装于u型架的一侧,所述u型架的输出轴贯穿至驱动马达的内部;
33、防护罩,套接在驱动马达的输出轴上,所述防护罩截面为l形;
34、钢板,设置有两组,均安装与防护罩的内部,所述钢板的一端通过铰接座与防护罩活动连接;
35、缓冲板,安装于钢板的顶端;
36、缓震弹簧,安装于钢板和防护罩之间,呈倾斜设置。
37、进一步优化本技术方案,所述第一转轴和第二转轴外侧的横置架夹角呈九十度。
38、与现有技术相比,本发明的有益效果是:该多形式搬运机械手装置使用时,具有多形式搬运的功能,即单次取料可进行不同位置的物料抓取以及搬运,并且,单次可能进行多工位的物料抓取,抓取过程中具有接料的功能,防止物料的掉落,起到较好的物料防护的功能;
39、(1)第一转轴和第二转轴外侧的横置架组成的夹角为九十度,以便在进行物料抓取时,即可实现对不同方向的物料进行同步抓取的效果,即利用抓夹机构对物料进行抓取,接着驱动旋转电机带动连接轴和主齿轮旋转,主齿轮和第一齿轮与第二齿轮相互啮合,即使第一齿轮和第二齿轮呈反向转动,继而使第一转轴和第二转轴同步旋转,以便带动第一转轴和第二转轴上的横置架同步转动,以便在物料抓取后可将不同的物料搬运至相应位置,即可实现多形式的物料搬运,以提高装置的工作效率;
40、驱动电机带动主转轮旋转,配合导向轮即可使移动带运转,以便使横向移块沿着移动带做横向水平运动,并带动连接架在限位槽中同步滑动,为横向移块的运动进行支撑导向,即可带动电动推杆、升降板、抓夹机构同步运动,以便对物料的抓取位置进行调节,以便对不同位置的物料进行抓取,操作便捷,并且第一转轴和第二转轴上的横置架和抓夹机构为独立控制工作,即可进一步提高装置取料的灵活性,使用范围更加广泛,并利用电动推杆可推动升降板和抓夹机构进行高度调节,以便对不同高度的物料进行抓夹,使用更方便;
41、(2)驱动自锁电机带动中心轴旋转,从而带动转架、弧形拉杆同步转动,弧形拉杆拉动两组活动块相互靠近或者相互远离,则带动夹持臂同步运动,以便对不同大小的物料进行夹持,并配合防滑凸起即可增大与物料的摩擦力,起到较好的防滑效果,并且夹持臂的一侧设置有截面为三角形的凹槽,即可在使用时可以对圆形、三角形或者是矩形的物料进行抓夹,以扩大使用范围;
42、在进行物料抓夹时物料会触碰到按压开关,起到按压效果,从而通过按压开关控制驱动马达开启,则带动防护罩同步转动,从而使两组防护罩将整个抓夹机构包覆主,即可对抓夹的物料进行接料防护,防止因重力导致掉落,并配合缓冲板、钢板和缓震弹簧对万一掉落的物料进行缓震防护,一方面可以避免对防护罩造成过大损伤,并可以对物料进行减震防护,避免对物料造成损伤。
- 还没有人留言评论。精彩留言会获得点赞!