一种宏微空间机械臂的任务规划方法
【】本发明涉及一种宏微空间机械臂任务规划方法,属于宏微空间机械臂任务规划。
背景技术
0、
背景技术:
1、随着我国航天事业的不断发展,空间机械臂因其高灵活性、高适应性、高精度等特点,在空间操作任务中发挥着越来越重要的作用。然而受限于机械臂物理参数,空间机械臂在精细操作方面的应用受到严重制约。特别是以小型卫星为操作目标的大范围操作任务例如卫星燃料加注、零件更换等,在执行这类任务时,为保证空间站安全,空间站与目标卫星需要保持一定的距离,因此对空间机械臂的作业范围和作业精度有较高的要求。由于现有实验舱机械臂(微机械臂)不具备大范围运动的能力;空间站核心舱机械臂(宏机械臂)的末端执行器无法满足操作任务的需求,因此将两机械臂级联形成宏微机械臂,从而拓展空间站操作范围。相对于常规形式的空间机械臂,宏微机械臂的任务场景更加丰富、任务种类更加多样。其中以空间站大型桁架装配、卫星燃料加注、模块更换等任务为代表,由于工作场景不同、任务对象属性各异、任务目标多样,导致机械臂的约束条件、优化指标等参数各不相同,进而增加了宏微机械臂的规划难度。同时宏微机械臂的作业精度更容易受到来自太空环境、操作对象、自身等方面的动态扰动影响,轻则影响任务执行的效果,重则导致任务失败和威胁机械臂安全。因此,研究空间站宏微机械臂自主运动规划方法具有重要意义。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明实施例提供了一种宏微空间机械臂任务规划方法,以实现宏微空间机械臂在空间站场景下可以自主执行空间任务。
2、本发明实例提供了一种宏微空间机械臂任务规划方法,包括:
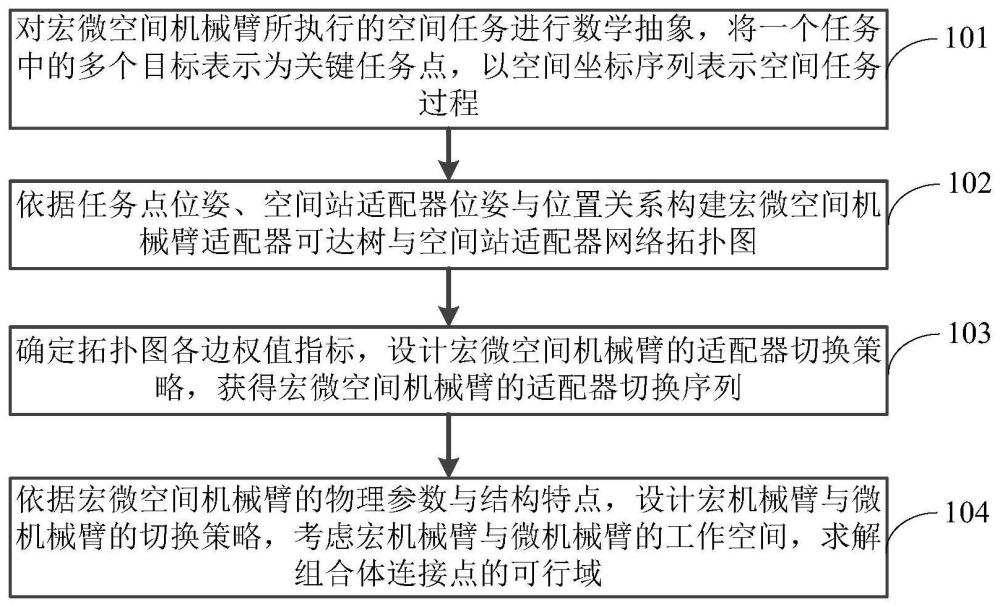
3、对宏微空间机械臂所执行的空间任务进行数学抽象,将一个任务中的多个目标表示为关键任务点,以空间坐标序列表示空间任务过程;
4、依据任务点位姿、空间站适配器位姿与位置关系构建空间站适配器拓扑图,确定拓扑图各边权值指标,设计宏微空间机械臂的适配器切换策略,获得宏微空间机械臂的适配器切换序列;
5、依据宏微空间机械臂的物理参数与结构特点,设计宏机械臂与微机械臂两臂之间的工作次序切换策略,考虑宏机械臂与微机械臂的工作空间,求解组合体连接点的可行域。
6、上述方法中,所依据空间任务过程,将一个任务中的多个目标表示为关键任务点,以空间坐标序列表示空间任务过程包括:
7、使用数学表征描述给定任务点集中每个点的属性。将每个点表示为p={p1,p2,…,pn},其中n表示点集中点的数量。
8、每个点pi包括下列属性:
9、位姿pose:表示点在某个空间中的位置,使用向量或坐标表示为pi=(x,y,z,rz,ry,rx)。
10、优先级priority:表示点的重要程度或优先级,是一个实数值或离散的优先级标签。
11、访问状态visited:表示点是否已被访问过的标志,用布尔值表示,其中true表示已访问,false表示未访问。
12、将任务点集p的数学表征定义为:
13、p={(x1,y1,z1,rz1,ry1,rx1,priority1,visited1),
14、(x2,y2,z2,rz2,ry2,rx2,priority2,visited2),
15、…,(xn,yn,zn,rzn,ryn,rxn,priorityn,visitedn)}
16、其中,每个元组表示一个点,包含其位姿(x,y,z,rz,ry,rx)、优先级priority和访问状态visited。
17、上述方法中,所依据任务关键点在空间站附近的分布情况与空间站适配器在各个舱体的安装位置,构建任务点适配器可达树与空间站适配器网络拓扑图,依据空间机械臂适配器切换代价,设计路径权值计算方法包括:
18、每一层存储优先级priority为该层深度的任务点可达的适配器,再将它们分别连接至下一层任务点的可达适配器上。
19、适配器网络拓扑图构建的原则:
20、任意两个适配器能否抽象为共用一条边的两个顶点取决于机械臂能否以其中一个适配器为基座且机械臂末端与另一个适配器对接,同时该构型满足无碰撞的要求。
21、对所有适配器两两进行遍历,以其中一个适配器位姿为机械臂基座位姿、另一个适配器位姿作为机械臂末端位姿,基于运动学逆解,求解机械臂关节角度。
22、若运动学逆解无解,则两个适配器在网络拓扑图中无法连接;
23、若运动学逆解有解,则检测每一组逆解是否会与周围环境发生碰撞。若存在一组满足机械臂与周围环境无碰撞的逆解结果,则两个适配器能够抽象为共用一条边的两个节点;若不存在机械臂与周围环境无碰撞的逆解结果,则这两个适配器在网络拓扑图中无法连接。
24、在得到任务点适配器可达树与空间站适配器网络拓扑图之后,对每个节点连接的边做权值设置。其中,在任务点适配器可达树中若两任务点相连的适配器一致,则这两个任务点的作业不需要切换适配器完成,故两节点的边的权值为0;当两个相连节点适配器不一致时,证明访问完第一个任务点后需要切换适配器才能访问到下一任务点,两个节点连接的边的权值即为空间站适配器网络拓扑图中由当前适配器到目标适配器的最小权值路径值。
25、对于空间站适配器网络拓扑图各边权值的设置,要考虑机械臂在不同的适配器间运动对任务时间、能源消耗等空间站资源的消耗,通过分析适配器切换路径的影响因素,明确适配器网络拓扑图的权值。
26、各边的权值是衡量两个适配器之间机械臂运动规划难易程度的变量。通过梳理空间站适配器的特点,将以下变量作为适配器切换路径的影响因素:
27、(1)笛卡尔空间距离
28、将两适配器之间的笛卡尔空间距离作为第一个衡量两个适配器之间机械臂路径规划难易程度的指标。在两个适配器能够连通的情况下,笛卡尔空间距离越小,机械臂从其中一个适配器爬行到另一个适配器所花费的能量与时间就会越少。在空间站环境中,机械臂执行任务消耗的能量越少越好,同时,时间也是机械臂遥操作任务的重要指标,时间越小,任务指令长度越小,遥操作任务越安全。
29、若适配器a的位姿信息为(xa,ya,za,rxa,rya,rza),适配器b的位姿信息为(xb,yb,zb,rxb,ryb,rzb),则两适配器之间的笛卡尔空间距离为
30、
31、(2)两适配器之间的碰撞系数
32、将两适配器之间的碰撞系数作为第二个衡量两个适配器之间机械臂运动规划难易程度的指标。碰撞系数是衡量两个适配器之间障碍物分布程度的变量,两适配器之间障碍物越多,机械臂在执行任务时需要避障的情况越多,相同输入的复杂任务将被拆解为更多段的轨迹,机械臂执行相同任务将会花费更多的能量与时间。
33、因此令机械臂首末两端分别与两个待检测适配器相连,对机械臂做锁定关节的逆运动学求解,检测求解得到的机械臂构型是否发生碰撞,若该锁定关节角度下存在不发生碰撞的构型,则无碰撞次数nobs-free加一。令两适配器之间的碰撞系数为σab,则有:
34、
35、得到两适配器之间的笛卡尔空间距离distab与碰撞系数σab后,需要对两者进行加权,得到适配器网络拓扑权值。具体计算公式为:
36、ωab=λ1distab+λ2σab
37、式中,ωab为适配器网络拓扑图中适配器a与适配器b之间的权重值;λ1为两适配器之间的笛卡尔空间距离distab权重系数,λ2为两适配器之间的碰撞系数σab权重系数。其中λ1、λ2可由变异系数法计算得到,λ1+λ2=1。
38、变异系数法能够消除各个评价指标因量纲不同产生的影响,其总体思想是评价指标的内部差异越大,其对总体指标的影响程度越大,具备更好的区分度,因此应分配更大的权重;评价指标的内部差异越小,其对总体指标的影响程度越小,因此应分配更小的权重。
39、各项指标的变异系数公式为:
40、
41、式中,vk为第k项指标的变异系数;也称为标准差系数;τk为适配器切换路径影响因素的第k项指标的标准差;适配器切换路径影响因素的第k项指标的平均数,k=1,2分别表示两适配器之间的笛卡尔空间距离distab与两适配器之间的碰撞系数σab。
42、各指标的权重系数公式为:
43、
44、上述方法中,所依据宏微机械臂的结构特点与物理参数,分析宏机械臂与微机械臂的工作空间,得到宏微空间机械臂的连接点停留区域集合,包括:
45、在求解宏微机械臂工作空间时,通过蒙特卡洛法大量随机抽取各关节变量组合,通过机械臂正向运动方程可以得到其末端参考点的所有坐标值,这些坐标值所包络的整个空间就是机械臂末端的工作空间。所得到的工作空间与机械臂末端实际工作空间存在一定差距,当随着抽取的随机变量组合越多,计算所得的工作空间越接近实际工作空间。主要的步骤如下所示:
46、a)通过随机函数rand可知机械臂关节变量的随机值为:
47、
48、其中q为关节随机变量;j=1,...,n;为关节角的最小值与最大值;i=1,...,d,d表示关节个数。
49、b)将所得到的关节随机变量带入正向运动学的方程中,得到机械臂末端参考点的所有位置坐标值p(x,y,z);
50、c)在matlab中建立笛卡尔坐标系输入所有末端参考点的位置坐标值,得到机械臂的工作空间。
51、在已知有序任务点集的位姿与对应的适配器位姿的情况下,宏微机械臂要依次抵达任务点执行任务,由于宏微机械臂的分时控制特性,宏机械臂需要携带微机械臂抵达一个位置后再驱动微机械臂抵达任务点执行任务。
52、在空间中设置四个有序的任务点以阐述基于工作空间分析求解宏微机械臂连接点可行域的流程,宏微机械臂连接点可行域求解步骤如下:
53、a)以1号任务点为微机械臂基座位姿,遍历宏机械臂工作空间中离散的点,通过微机械臂运动学逆解求得的微机械臂末端可达的区域,也为1号任务点对应的宏微机械臂连接点可行域;
54、b)以2号任务点为微机械臂基座位姿,遍历1号任务点的宏微机械臂连接点可行域中的离散点,基于a)中流程,求得1、2号任务点对应的宏微机械臂连接点可行域;
55、c)同理按照步骤a)、b)的方法计算得到1、2、3号任务点对应的宏微机械臂连接点可行域;
56、d)根据上述步骤,对4号任务点的宏微机械臂连接点可行域进行求解,发现1、2、3号任务点对应的宏微机械臂连接点可行域中不存在微机械臂有运动学逆解的情况,故需要新建一个4号任务点的宏微机械臂连接点可行域来保证宏微机械臂能够访问到4号任务点。
57、e)重复以上步骤直至遍历完所有的任务点,获得当前适配器下所有的宏微机械臂连接点可行域。
58、通过以上步骤获得的宏微机械臂连接点可行域可以支持宏微机械臂以最少的宏机械臂与微机械臂切换频率完成对当前适配器上所有任务点的遍历,具体流程为宏机械臂携带微机械臂到达第一个连接点可行域,然后再切换到微机械臂,让微机械臂依次访问该连接点可行域的任务点,之后切换回宏机械臂并驱动宏机械臂移动至下一个连接点可行域,以此类推完成操作。通过以上步骤完成任务点访问宏机械臂与微机械臂的切换次数即为宏微机械臂连接点可行域个数,避免了每访问一个任务点时都需要频繁的切换宏机械臂与微机械臂来调整宏微机械臂末端位姿。通过计算得到的宏微机械臂连接点可行域还可作为宏微机械臂构型优化的一个决策变量,降低宏微机械臂逆运动学求解的计算难度并优化出宏微机械臂最优连接点。
- 还没有人留言评论。精彩留言会获得点赞!