一种对抗式双面弯曲软体驱动机构及其制造方法
本发明涉及软体驱动器,具体讲是指一种对抗式双面弯曲软体驱动机构及其制造方法。
背景技术:
1、传统的机器人大多由刚性的金属部件和电动马达组成,这使得它们笨重、昂贵、且不安全,而且对未知环境的适应能力差。相比之下,生物有机仿生机器人广泛使用软材料,在灵巧性、敏捷性和适应性方面远远超过传统机器人。特别是,由于天然肌肉优异的性能,“人造肌肉”一直是研究热点,研究人员企图复制天然肌肉的多功能性、与传感器的无缝结合以及自我修复的能力。
2、到目前为止,天然肌肉在各种性能上仍是无法替代的,但软机器人技术的快速发展使可行的替代方案比以往任何时候都更接近天然肌肉。最近开发的电液压驱动器,是一种新型的高性能、自传感人工肌肉,通过耦合静电和液压力来实现不同的驱动模式;在目前已有的诸多设计中,功能方面已经与自然肌肉不相伯仲。电液压驱动器由聚合物壳组成,聚合物壳上贴有薄膜电极,内部注入一定体积的液体电介质。当电压加到薄膜电极上时,电极之间就会产生电场。电场在驱动器中产生麦克斯韦应力,导致液体介质的重新分布和驱动器的变形。目前,此类基于电液压机理的驱动器大多为单向变形,存在变形幅度小的局限性。
技术实现思路
1、针对现有技术的不足,本发明的第一个目的在于提供一种对抗式双面弯曲软体驱动机构,以解决现有技术中的软体驱动器变形幅度小的技术问题。
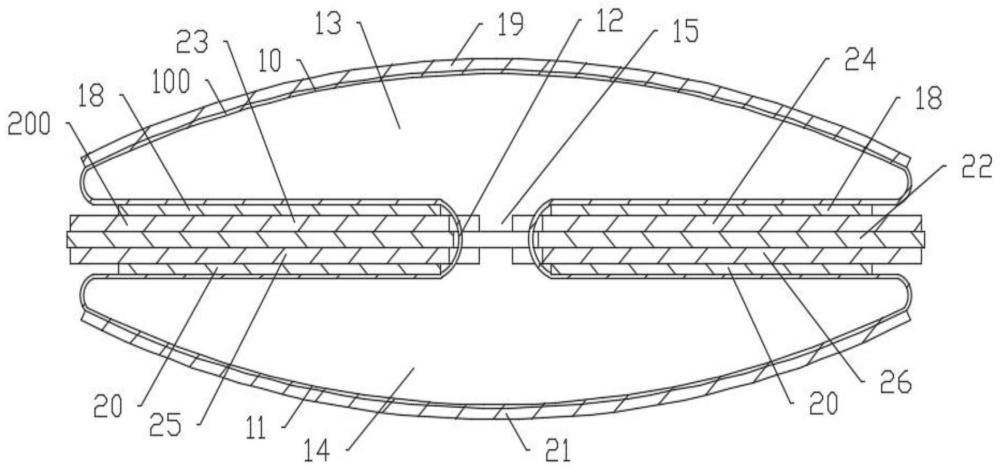
2、为解决上述技术问题,本发明提供了一种对抗式双面弯曲软体驱动机构,包括绝缘液袋和柔性变形组件,绝缘液袋包括第一变形部、第二变形部和连接部,所以连接部上下两端分别连接第一变形部和第二变形部,第一变形部内设有第一容纳腔,第二变形部内设有第二容纳腔,连接部内设有连通第一容纳腔和第二容纳腔的连通通道,第一容纳腔和/或第二容纳腔中储存有液体电介质,柔性变形组件设有弯曲部,柔性变形组件能够在弯曲部弯曲变形,弯曲部设有通槽,连接部位于通槽内并使得第一变形部和第二变形部分别位于柔性变形组件上下两侧,第一变形部下端面与柔性变形组件上端面之间通过第一薄膜电极连接,第一变形部上端面连接有第二薄膜电极,第二变形部上端面与柔性变形组件下端面之间通过第三薄膜电极连接,第二变形部下端面连接有第四薄膜电极。
3、采用上述结构后,本发明中的一种对抗式双面弯曲软体驱动机构具有以下优点:本发明中的软体驱动机构采用对抗式结构,在一侧薄膜电极通电以后,通电侧的电介质经连通通道被挤压至另一侧,该侧的变形部体积收缩变小,另一侧的变形部体积膨胀变大,由于第一变形部和第二变形部均与柔性变形组件连接,因此在两个变形部变形时迫使柔性变形组件在弯曲部弯曲变形,实现设计要求,相较于现有技术中单侧变形的软体驱动器,变形量更大,适应环境能力强并且响应更快,能量密度更高。
4、作为改进,柔性变形组件包括柔性软质板材、第一硬质板材、第二硬质板材、第三硬质板材和第四硬质板材,通槽设于柔性软质板材上,第一硬质板材和第二硬质板材均连接在柔性软质板材上端面并分别位于通槽左右两侧,第一变形部下端面与第一硬质板材和第二硬质板材之间均连接有第一薄膜电极,第三硬质板材和第四硬质板材均连接在柔性软质板材下端面并分别位于通槽左右两侧,第二变形部上端面与第三硬质板材和第四硬质板材之间均连接有第三薄膜电极;采用此种结构,在柔性软质板材上下端面上分别连接第一硬质板材、第二硬质板材和第三硬质板材、第四硬质板材,使得柔性软质板材仅能在通槽处弯曲变形,并且由各个硬质板材通过对应的薄膜电极与变形部连接,使得变形部体积变化时能带动柔性软质板材稳定变形,通电后变形响应更快,并且此种结构组成的柔性变形组件成本低廉、易于制备。
5、作为改进,通槽设于柔性软质板材中部,连接部连接第一变形部下端中部和第二变形部上端中部;采用此种结构,进一步提高软体驱动机构的变形量。
6、作为改进,第一变形部上端面和第二变形部下端面均为外凸的弧形;采用此种结构,同等体积下第一变形部和第二变形部能够容纳更多的液体电介质,使得液体电介质流动后第一变形部与第二变形部之间体积的最大差值更大,进一步提高软体驱动机构的变形量。
7、作为改进,第二薄膜电极呈弧形覆盖在第一变形部上端面,第四薄膜电极呈弧形覆盖在第二变形部下端面;采用此种结构,覆盖式且呈弧形的薄膜电极能够与变形部端面充分接触,进一步提高通电时的响应速度。
8、本发明的第二个目的在于提供一种对抗式双面弯曲软体驱动机构的制造方法,用于制造上述的对抗式双面弯曲软体驱动机构,包括以下步骤:
9、s1、将热塑性塑料片用热封机粘合形成绝缘液袋,并在绝缘液袋上预留缺口;
10、s2、将液体电介质从缺口注射进绝缘液袋中;
11、s3、密封缺口;
12、s4、将第一变形部或第二变形部穿过通槽并使得连接部位于通槽中;
13、s5、在第一变形部下端面粘贴第一薄膜电极,并将第一薄膜电极粘贴至柔性变形组件上端面,在第一变形部上端面粘贴第二薄膜电极,在第二变形部上端面粘贴第三薄膜电极,并将第三薄膜电极粘贴至柔性变形组件下端面,在第二变形部下端面粘贴第四薄膜电极。
14、采用此种方式后,本发明中的一种对抗式双面弯曲软体驱动机构的制造方法具有以下优点:制造出的软体驱动机构采用对抗式结构,在一侧薄膜电极通电以后,通电侧的电介质经连通通道被挤压至另一侧,该侧的变形部体积收缩变小,另一侧的变形部体积膨胀变大,由于第一变形部和第二变形部均与柔性变形组件连接,因此在两个变形部变形时迫使柔性变形组件在弯曲部弯曲变形,实现设计要求,相较于现有技术中单侧变形的软体驱动器,变形量更大,适应环境能力强并且响应更快,能量密度更高。
15、作为改进,在步骤s2和步骤s3之间还包括:步骤s2.5、排空绝缘液袋的内部空气;采用此种方式,使得绝缘液袋内仅储存有液体电介质,避免袋内空气影响变形量,进一步提高软体驱动机构的变形量。
技术特征:
1.一种对抗式双面弯曲软体驱动机构,其特征在于,包括绝缘液袋(100)和柔性变形组件(200),所述绝缘液袋(100)包括第一变形部(10)、第二变形部(11)和连接部(12),所以连接部(12)上下两端分别连接所述第一变形部(10)和所述第二变形部(11),所述第一变形部(10)内设有第一容纳腔(13),所述第二变形部(11)内设有第二容纳腔(14),所述连接部(12)内设有连通所述第一容纳腔(13)和所述第二容纳腔(14)的连通通道(15),所述第一容纳腔(13)和/或所述第二容纳腔(14)中储存有液体电介质,所述柔性变形组件(200)设有弯曲部(16),所述柔性变形组件(200)能够在所述弯曲部(16)弯曲变形,所述弯曲部(16)设有通槽(17),所述连接部(12)位于所述通槽(17)内并使得所述第一变形部(10)和所述第二变形部(11)分别位于所述柔性变形组件(200)上下两侧,所述第一变形部(10)下端面与所述柔性变形组件(200)上端面之间通过第一薄膜电极(18)连接,所述第一变形部(10)上端面连接有第二薄膜电极(19),所述第二变形部(11)上端面与所述柔性变形组件(200)下端面之间通过第三薄膜电极(20)连接,所述第二变形部(11)下端面连接有第四薄膜电极(21)。
2.根据权利要求1所述的对抗式双面弯曲软体驱动机构,其特征在于,所述柔性变形组件(200)包括柔性软质板材(22)、第一硬质板材(23)、第二硬质板材(24)、第三硬质板材(25)和第四硬质板材(26),所述通槽(17)设于所述柔性软质板材(22)上,所述第一硬质板材(23)和所述第二硬质板材(24)均连接在所述柔性软质板材(22)上端面并分别位于所述通槽(17)左右两侧,所述第一变形部(10)下端面与所述第一硬质板材(23)和所述第二硬质板材(24)之间均连接有所述第一薄膜电极(18),所述第三硬质板材(25)和所述第四硬质板材(26)均连接在所述柔性软质板材(22)下端面并分别位于所述通槽(17)左右两侧,所述第二变形部(11)上端面与所述第三硬质板材(25)和所述第四硬质板材(26)之间均连接有所述第三薄膜电极(20)。
3.根据权利要求2所述的对抗式双面弯曲软体驱动机构,其特征在于,所述通槽(17)设于所述柔性软质板材(22)中部,所述连接部(12)连接所述第一变形部(10)下端中部和所述第二变形部(11)上端中部。
4.根据权利要求1所述的对抗式双面弯曲软体驱动机构,其特征在于,所述第一变形部(10)上端面和所述第二变形部(11)下端面均为外凸的弧形。
5.根据权利要求4所述的对抗式双面弯曲软体驱动机构,其特征在于,所述第二薄膜电极(19)呈弧形覆盖在所述第一变形部(10)上端面,所述第四薄膜电极(21)呈弧形覆盖在所述第二变形部(11)下端面。
6.一种对抗式双面弯曲软体驱动机构的制造方法,其特征在于,用于制造权利要求1至5任意一项所述的对抗式双面弯曲软体驱动机构,包括以下步骤:
7.根据权利要求6所述的对抗式双面弯曲软体驱动机构的制造方法,其特征在于,在步骤s2和步骤s3之间还包括:
技术总结
本发明涉及一种对抗式双面弯曲软体驱动机构及其制造方法,包括绝缘液袋和柔性变形组件,绝缘液袋包括第一变形部、第二变形部和连接部,连接部内设有连通第一变形部的第一容纳腔和第二变形部的第二容纳腔的连通通道,柔性变形组件设有弯曲部,弯曲部设有通槽,连接部位于通槽内,第一变形部下端面与柔性变形组件上端面之间通过第一薄膜电极连接,第一变形部上端面连接第二薄膜电极,第二变形部上端面与柔性变形组件下端面之间通过第三薄膜电极连接,第二变形部下端面连接第四薄膜电极;制造方法包括将热塑性塑料片粘合形成绝缘液袋,注射液体电介质,连接柔性变形组件,粘贴薄膜电极;以解决现有技术中的软体驱动器变形幅度小的技术问题。
技术研发人员:刘学婧,李靖,周东辉,裴毓,张敏慧,潘光,曹永辉
受保护的技术使用者:西北工业大学宁波研究院
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!