一种面向外骨骼机器人系统的变刚度膝关节的制作方法
本发明属于外骨骼机器人领域,具体涉及一种面向外骨骼机器人系统的变刚度膝关节。
背景技术:
1、随着生活水平的不断提高,中国的老龄化进程逐步加快,居民患脑卒中、心脑血管及神经系统疾病的概率也逐渐攀升。临床康复医药学证明,除药物和手术治疗外,通过早期的康复训练可以有效地诱导大脑的神经重塑、促进患者肢体的康复、减轻患者肢体的运动功能障碍。但由于康复治疗过程需要理疗师的全程辅助陪同,难免会出现经验治疗、成本高、效率低以及心理负担等问题。而以康复外骨骼代替理疗师进行康复治疗的方法具有治疗效果显著、训练效率高、医疗成本低等优点,完美解决了人工训练的问题,逐渐成为目前临床康复治疗的重要技术手段。
2、公开号为cn113524143b的发明专利中,公开了一种变刚度膝关节及下肢外骨骼机器人,该发明通过压盘转动角度不同变刚度控制结构的形变量不同从而实现变刚度,但刚度变化及控制不够柔顺。
3、公开号为cn111823218b的发明专利中,公开了一种基于形状记忆合金的变刚度膝关节外骨骼机器人,该发明能够通过变刚度模块内部记忆合金实现刚度调节,但其结构过于复杂,且重量过重。
技术实现思路
1、本发明的目的在于提出一种面向外骨骼机器人系统的变刚度膝关节,并对所设计的可变刚度膝关节进行研究与分析,解决传统刚性外骨骼机器人关节顺应性差、穿戴舒适性差、效率低、安全性低等问题。
2、实现本发明目的的技术解决方案为:一种面向外骨骼机器人系统的变刚度膝关节,包括两个腿杆和驱动机构,以及与腿杆相连的刚度调节机构;两个腿杆分别是大腿杆和小腿杆,驱动机构包括驱动电机,大腿杆、小腿杆和驱动电机同轴线组成膝关节主体框架;刚度调节机构包括变刚度调节机构和支点调节机构,刚度调节机构与主体框架相连组成变刚度膝关节。
3、进一步的,所述大腿杆通过转轴和轴承与小腿杆相连组成转动副,并通过垫片、挡块和螺帽来加固大腿杆和小腿之间的转动副连接,实现基本的外骨骼膝关节转动副。
4、进一步的,所述驱动电机外壳与主体框架板固连,驱动电机转子与大腿杆固连,共同组成膝关节主体框架,实现基本的外骨骼膝关节驱动机构。
5、进一步的,所述刚度调节机构包括变刚度调节机构和支点调节机构,变刚度调节机构包括杠杆、杠杆支点、钢丝固定销、滑轮、滑轮固定销、钢丝绳、杠杆轴承、轴承销、限位块、主体框架板、弹簧支架拉簧、滑轮组支架、滑轮组和滑轮组固定销;
6、所述杠杆通过杠杆轴承和轴承销与小腿杆相连组成转动副,杠杆通过杠杆支点与主体框架板相连组成转动副,滑轮通过滑轮固定销与主体框架板相连组成第一组滑轮,滑轮组支架与主体框架板固连,滑轮组通过滑轮组固定销与主体框架板相连组成第二组滑轮,弹簧支架与主体框架板固连,拉簧与弹簧支架相连,钢丝绳通过钢丝固定销与杠杆固连,并绕过滑轮和滑轮组与拉簧相连,实现变刚度调节。
7、进一步的,支点调节机构包括主体框架板、杠杆、杠杆支点、丝杠固定块、丝杠滑块、丝杠滑块支架、导轨滑块、丝杠、丝杠固定块、电机支架、丝杠电机;
8、所述杠杆支点通过丝杠滑块与丝杠组成螺旋副,丝杠滑块通过丝杠滑块支架与导轨滑块固连,导轨滑块与主体框架板固连,丝杠两侧与丝杠固定块和丝杠固定块相连组成转动副,丝杠固定块和丝杠固定块与主体框架板固连,电机支架与主体框架板固连,丝杠电机与电机支架固连,丝杠电机转子与丝杠固连,实现变刚度杠杆支点调节。
9、本发明与现有技术相比,其显著优点在于:
10、(1)本发明的关节与人体关节无对应关系,可实现人体多种运动,不会因装置关节的单一形式对人体产生运动干涉。
11、(2)采用拉伸弹簧作为弹性储能元件,基于杠杆机构,通过改变支点位置调整输出比的方法,完成了一种结构紧凑的刚度调节机构的结构设计。
12、(3)采用角度驱动电机与刚度调节电机相互独立的并联驱动结构,将关节刚度与位置的控制分离,解决了变刚度关节刚度与位置耦合控制的难题。
13、(4)少量传感器的使用既能准确获取所需人体足部运动信息,又能降低控制难度;
技术特征:
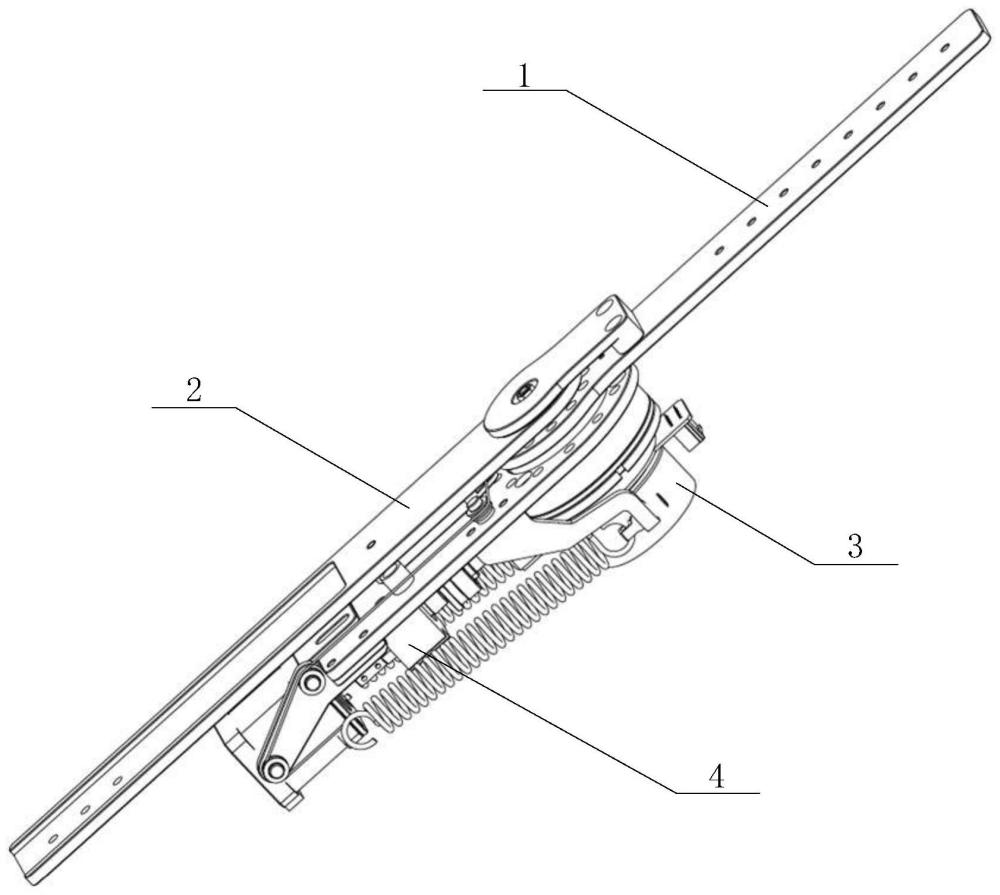
1.一种面向外骨骼机器人系统的变刚度膝关节, 其特征在于, 包括两个腿杆和驱动机构,以及与腿杆相连的刚度调节机构(4);两个腿杆分别是大腿杆(1)和小腿杆(2), 驱动机构包括驱动电机(3), 大腿杆(1)、小腿杆(2)和驱动电机(3)同轴线组成膝关节主体框架;刚度调节机构(4)包括变刚度调节机构和支点调节机构, 刚度调节机构(4)与主体框架相连组成变刚度膝关节。
2.根据权利要求1所述的面向外骨骼机器人系统的变刚度膝关节, 其特征在于,所述大腿杆(1)通过转轴(9)和轴承(8)与小腿杆(2)相连组成转动副, 并通过垫片(7)、挡块(6)和螺帽(5)来加固大腿杆(1)和小腿杆(2)之间的转动副连接。
3.根据权利要求1所述的面向外骨骼机器人系统的变刚度膝关节, 其特征在于,所述驱动电机(3)外壳与主体框架板(10)固连,驱动电机(3)转子与大腿杆(1)固连,共同组成膝关节主体框架。
4.根据权利要求1所述的面向外骨骼机器人系统的变刚度膝关节, 其特征在于,所述变刚度调节机构包括杠杆(20)、杠杆支点(14)、钢丝固定销(17)、滑轮(18)、滑轮固定销(19)、钢丝绳(21)、杠杆轴承(22)、轴承销(23)、限位块(24)、主体框架板(10)、弹簧支架(15)、拉簧(16)、滑轮组支架(30)、滑轮组(31)和滑轮组固定销(32);
5.根据权利要求4所述的面向外骨骼机器人系统的变刚度膝关节, 其特征在于, 限位块(24)安装在主体框架板(10)的限位孔上, 用于防止杠杆(20)旋转角度过大。
6.根据权利要求4所述的面向外骨骼机器人系统的变刚度膝关节, 其特征在于,当小腿杆(2)相对于主体框架板(10)转动时,小腿杆(2)带动杠杆(20)绕杠杆支点(14)转动, 同时与杠杆(20)固连的钢丝绳(21)随着杠杆(20)的转动被拉动,拉力通过钢丝绳(21)绕滑轮(18)和滑轮组(31)传导至拉簧(16),通过拉动拉簧(16)实现膝关节变刚度。
7.根据权利要求1所述的面向外骨骼机器人系统的变刚度膝关节, 其特征在于,所述支点调节机构包括主体框架板(10)、杠杆(20)、杠杆支点(14)、丝杠固定块一(13)、丝杠滑块(12)、丝杠滑块支架(11)、导轨滑块(25)、丝杠(26)、丝杠固定块二(27)、 电机支架(28)和丝杠电机(29);杠杆支点(14)通过丝杠滑块(12)与丝杠(26)组成螺旋副,丝杠滑块(12)通过丝杠滑块支架(11)与导轨滑块(25)固连,导轨滑块(25)与主体框架板(10)固连,丝杠(26)两侧与丝杠固定块一(13)和丝杠固定块二(27)相连组成转动副,丝杠固定块一(13)和丝杠固定块二(27)与主体框架板(10)固连, 电机支架(28)与主体框架板(10)固连,丝杠电机(29)与电机支架(28)固连, 丝杠电机(29)转子与丝杠(26)固连。
8.根据权利要求7所述的面向外骨骼机器人系统的变刚度膝关节, 其特征在于,通过丝杠电机(29)的转动带动丝杠(26)转动, 以此使丝杠滑块(12)和杠杆支点(14)以丝杠轴线方向运动,来改变杠杆(20)的转动轴线,实现变刚度膝关节调节。
技术总结
本发明公开了一种面向外骨骼机器人系统的变刚度膝关节,包括两个腿杆和驱动机构,以及与腿杆相连的刚度调节机构;腿杆包括大腿杆和小腿杆;驱动机构主要是驱动电机;大腿杆、小腿杆和驱动电机同轴线组成膝关节主体框架;刚度调节机构包括变刚度调节机构和支点调节机构,刚度调节机构与主体框架相连组成变刚度膝关节。本发明通过改变支点位置调节杠杆输出比例来实现刚度调节,能够实现外骨骼机器人变刚度膝关节。
技术研发人员:何龙,姜昌龙,李仲,任敬伟,管小荣,陆磊丰,易玉龙
受保护的技术使用者:杭州智元研究院有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!