一种智能仿生机器人
本发明属于机器人,尤其涉及一种智能仿生机器人。
背景技术:
1、如今,机器人研究的领域已经从结构环境下的定点作业中走出来,向航空航天、星际探索、海洋探索、水下洞穴探索、军事侦察、军事攻击、军事防御、水下地下管道探测与维修、疾病检查治疗、抢险救灾等非结构环境下的自主作业方面发展,同时,仿生机器人也是科研工作必不可少的主要手段之一,随着相关技术的不断发展和完善,可以预见的是未来的仿生机器人可以设计成多种生物的形态,将在人类不能或难以到达的已知或未知的环境里工作,从而为人类带来极大便利;
2、现有技术中的仿生机器人包含多种,其中就包括四足行走机器人,其相对于传统的履带式车辆和轮式车辆来说,能够适应更多的应用环境,具有十分广阔的应用前景,同时为满足在复杂环境下的行走功能,四足行走机器人已经能够实现一定程度的避障功能,但现有技术依然不够完善,仅能够完成简单的避障工作,无法在能够实现自动避障的前提下,对障碍物的高度进行检测,无法为后续需要移动经过该路径的其它设备提供便利。
技术实现思路
1、有鉴于此,本发明要解决的技术问题在于提供一种智能仿生机器人,在能够实现自动避障的前提下,对障碍物的高度进行检测,为后续需要移动经过该路径的其它设备提供便利。
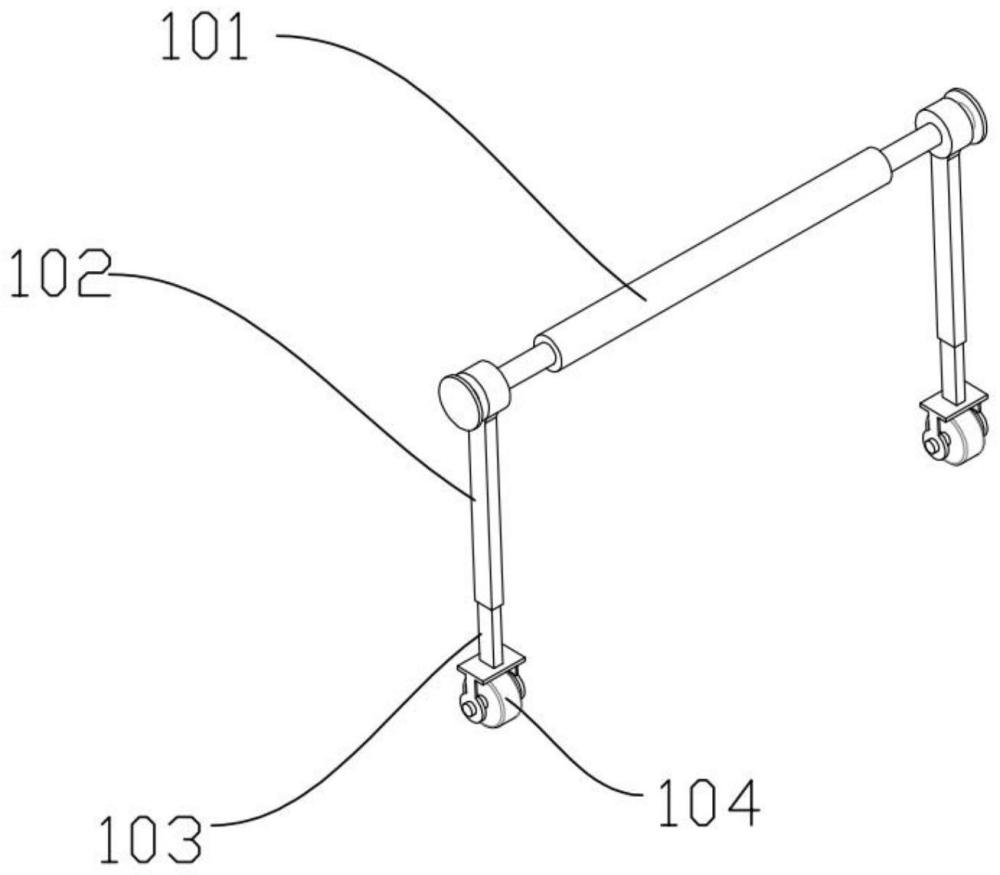
2、一种智能仿生机器人,包括基准辊,基准辊上转动连接有两个辅助壳,每个辅助壳上均滑动连接有支撑柱,基准辊上转动连接有配合架,配合架上转动连接有两个转动壳,每个转动壳上均滑动连接有支撑柱,配合架上固接有两个连接板,两个连接板上分别固接有两个扭簧的一端,两个扭簧的另一端分别固接在两个转动壳上,配合架上的两个支撑柱与基准辊上的两个支撑柱错落设置,配合架上固接有两个角度传感器,两个角度传感器转动端分别与两个转动壳固接。
3、每个所述支撑柱上均转动连接有移动轮。
4、还包括连接在配合架上的滑动部,滑动部上滑动连接有两个滑杆。
5、每个滑杆下侧均转动连接有支撑轮。
技术特征:
1.一种智能仿生机器人,其特征在于,包括基准辊(101),基准辊(101)上转动连接有两个辅助壳(102),每个辅助壳(102)上均滑动连接有支撑柱(103),基准辊(101)上转动连接有配合架(201),配合架(201)上转动连接有两个转动壳(301),每个转动壳(301)上均滑动连接有支撑柱(103),配合架(201)上固接有两个连接板(203),两个连接板(203)上分别固接有两个扭簧的一端,两个扭簧的另一端分别固接在两个转动壳(301)上,配合架(201)上的两个支撑柱(103)与基准辊(101)上的两个支撑柱(103)错落设置,配合架(201)上固接有两个角度传感器,两个角度传感器转动端分别与两个转动壳(301)固接。
2.根据权利要求1所述的一种智能仿生机器人,其特征在于,每个所述支撑柱(103)上均转动连接有移动轮(104)。
3.根据权利要求2所述的一种智能仿生机器人,其特征在于,还包括连接在配合架(201)上的滑动部(401),滑动部(401)上滑动连接有两个滑杆(404)。
4.根据权利要求3所述的一种智能仿生机器人,其特征在于,每个滑杆(404)下侧均转动连接有支撑轮(405)。
5.根据权利要求4所述的一种智能仿生机器人,其特征在于,所述滑动部(401)滑动连接在配合架(201)上。
6.根据权利要求5所述的一种智能仿生机器人,其特征在于,每个所述转动壳(301)上均固接有推动凸环(302),每个转动壳(301)上均固接有两个橡胶环(304),每个橡胶环(304)上均设有凹槽,滑动部(401)上固接有多个连接座(402),每个连接座(402)上均滑动连接有夹持部(403),每个连接座(402)与夹持部(403)之间均固接有压簧。
7.根据权利要求6所述的一种智能仿生机器人,其特征在于,每个所述转动壳(301)上均开设有断槽(303)。
8.根据权利要求7所述的一种智能仿生机器人,其特征在于,多个所述连接座(402)均通过螺栓可拆卸连接在滑动部(401)上。
9.根据权利要求1述的一种智能仿生机器人,其特征在于,还包括固接在配合架(201)上的齿环(202)。
10.根据权利要求1所述的一种智能仿生机器人,其特征在于,每个所述移动轮(104)上均规整设有多个凹槽。
技术总结
本发明属于机器人技术领域,尤其涉及一种智能仿生机器人,一种智能仿生机器人,包括基准辊,基准辊上转动连接有两个辅助壳,每个辅助壳上均滑动连接有支撑柱,基准辊上转动连接有配合架,配合架上转动连接有两个转动壳,每个转动壳上均滑动连接有支撑柱,配合架上固接有两个连接板,两个连接板上分别固接有两个扭簧的一端,两个扭簧的另一端分别固接在两个转动壳上,配合架上的两个支撑柱与基准辊上的两个支撑柱错落设置,配合架上固接有两个角度传感器,两个角度传感器转动端分别与两个转动壳固接,在能够实现自动避障的前提下,对障碍物的高度进行检测,为后续需要移动经过该路径的其它设备提供便利。
技术研发人员:付涛,张莉,刘海燕,单珂珂,李东浩
受保护的技术使用者:郑州铁路职业技术学院
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!