机械臂的控制方法、装置、存储介质及电子设备与流程
本发明涉及机器人运动控制领域,具体而言,涉及一种机械臂的控制方法、装置、存储介质及电子设备。
背景技术:
1、随着技术的发展,机器人已经越来越多的被用于辅助手术,然而,机器人建模和控制复杂,存在时变和不确定性,例如,柔性机器人是多输入多输出的非线性系统,在运动过程中或外界干扰时,容易引起振动问题,导致系统性能下降。常见的工业机器人只考虑由于动力学干扰转矩带来的末端残余振动(例如,电机工作带来的振动)的控制,无法满足手术精度需求。目前,相关技术中主要采用额外加装阻尼垫片的被动减振方式抑制手术机器人的末端执行器(例如,摆锯)振动,但是会使末端执行器的工作精度下降,导致末端执行器的工作精度较低。
2、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种机械臂的控制方法、装置、存储介质及电子设备,以至少解决现有技术中采用额外加装阻尼垫片的被动减振方式抑制手术机器人的末端执行器振动,导致末端执行器的工作精度较低的技术问题。
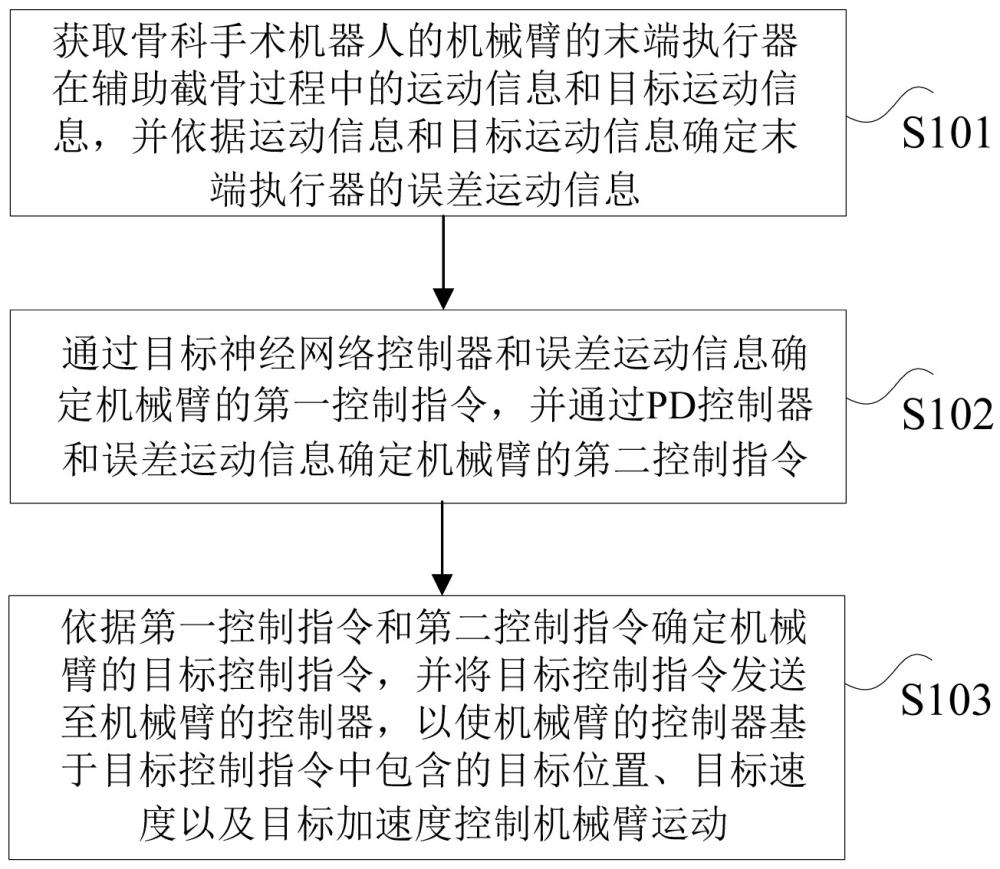
2、根据本发明实施例的一个方面,提供了一种机械臂的控制方法,包括:获取骨科手术机器人的机械臂的末端执行器在辅助截骨过程中的运动信息和目标运动信息,并依据运动信息和目标运动信息确定末端执行器的误差运动信息,其中,运动信息中至少包括末端执行器的实际位置、实际速度以及实际加速度,目标运动信息中至少包括末端执行器的预期位置、预期速度以及预期加速度,误差运动信息中至少包括末端执行器的误差位置、误差速度以及误差加速度;通过目标神经网络控制器和误差运动信息确定机械臂的第一控制指令,并通过pd控制器和误差运动信息确定机械臂的第二控制指令,其中,目标神经网络控制器是基于目标模型训练神经网络得到的,目标模型是对骨科手术机器人进行动力学建模得到的;依据第一控制指令和第二控制指令确定机械臂的目标控制指令,并将目标控制指令发送至机械臂的控制器,以使机械臂的控制器基于目标控制指令中包含的目标位置、目标速度以及目标加速度控制机械臂运动。
3、进一步地,依据运动信息和目标运动信息确定末端执行器的误差运动信息,包括:对实际位置和预期位置进行差值计算,得到误差位置;对实际速度和预期速度进行差值计算,得到误差速度;对实际加速度和预期加速度进行差值计算,得到误差加速度;依据误差位置、误差速度以及误差加速度组成误差运动信息。
4、进一步地,通过目标神经网络控制器和误差运动信息确定机械臂的第一控制指令,包括:通过目标神经网络控制器对误差运动信息进行处理,得到误差运动信息对应的特征向量表示;依据误差运动信息对应的特征向量表示预测机械臂的第一位置、第一速度以及第一加速度,并依据第一位置、第一速度以及第一加速度组成第一控制指令。
5、进一步地,第二控制指令中至少包括机械臂的第二位置、第二速度以及第二加速度,其中,依据第一控制指令和第二控制指令确定机械臂的目标控制指令,包括:对第一位置和第二位置进行加权计算,得到目标位置;对第一速度和第二速度进行加权计算,得到目标速度;对第一加速度和第二加速度进行加权计算,得到目标加速度;依据目标位置、目标速度以及目标加速度组成目标控制指令。
6、进一步地,在获取骨科手术机器人的机械臂的末端执行器在辅助截骨过程中的运动信息和目标运动信息之前,该方法还包括:获取骨科手术机器人在辅助截骨过程中的样本数据集,对样本数据集进行系统辨识,建立弹簧质量阻尼模型;对骨科手术机器人的机械臂进行动力学建模,得到动力学模型,并确定用于抑制末端执行器振动的反馈控制律;通过动力学模型和反馈控制律确定目标反馈参数,其中,目标反馈参数至少包括末端执行器的误差位置参数、误差速度参数以及误差加速度参数;依据弹簧质量阻尼模型和目标反馈参数生成目标模型,并基于目标模型训练神经网络,得到目标神经网络控制器。
7、进一步地,依据弹簧质量阻尼模型和目标反馈参数生成目标模型,包括:将误差位置参数、误差速度参数以及误差加速度参数输入弹簧质量阻尼模型进行参数替换,得到参数替换后的模型;将参数替换后的模型作为目标模型。
8、进一步地,弹簧质量阻尼模型的模型参数至少包括位置参数、速度参数以及加速度参数,其中,将误差位置参数、误差速度参数以及误差加速度参数输入弹簧质量阻尼模型进行参数替换,得到参数替换后的模型,包括:将位置参数替换为误差位置参数、将速度参数替换为误差速度参数以及将加速度参数替换为误差加速度参数,得到参数替换后的模型。
9、根据本发明实施例的另一方面,还提供了一种机械臂的控制装置,包括:第一确定单元,用于获取骨科手术机器人的机械臂的末端执行器在辅助截骨过程中的运动信息和目标运动信息,并依据运动信息和目标运动信息确定末端执行器的误差运动信息,其中,运动信息中至少包括末端执行器的实际位置、实际速度以及实际加速度,目标运动信息中至少包括末端执行器的预期位置、预期速度以及预期加速度,误差运动信息中至少包括末端执行器的误差位置、误差速度以及误差加速度;第二确定单元,用于通过目标神经网络控制器和误差运动信息确定机械臂的第一控制指令,并通过pd控制器和误差运动信息确定机械臂的第二控制指令,其中,目标神经网络控制器是基于目标模型训练神经网络得到的,目标模型是对骨科手术机器人进行动力学建模得到的;第一处理单元,用于依据第一控制指令和第二控制指令确定机械臂的目标控制指令,并将目标控制指令发送至机械臂的控制器,以使机械臂的控制器基于目标控制指令中包含的目标位置、目标速度以及目标加速度控制机械臂运动。
10、根据本发明实施例的另一方面,还提供了一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,其中,计算机程序被设置为运行时执行上述的机械臂的控制方法。
11、根据本发明实施例的另一方面,还提供了一种电子设备,该电子设备包括一个或多个处理器;存储器,用于存储一个或多个程序,当一个或多个程序被一个或多个处理器执行时,使得一个或多个处理器实现用于运行程序,其中,程序被设置为运行时执行上述的机械臂的控制方法。
12、在本发明实施例中,采用将pd控制器和神经网络控制器相结合的方式,首先获取骨科手术机器人的机械臂的末端执行器在辅助截骨过程中的运动信息和目标运动信息,并依据运动信息和目标运动信息确定末端执行器的误差运动信息,然后通过目标神经网络控制器和误差运动信息确定机械臂的第一控制指令,并通过pd控制器和误差运动信息确定机械臂的第二控制指令,然后依据第一控制指令和第二控制指令确定机械臂的目标控制指令,并将目标控制指令发送至机械臂的控制器,以使机械臂的控制器基于目标控制指令中包含的目标位置、目标速度以及目标加速度控制机械臂运动。其中,运动信息中至少包括末端执行器的实际位置、实际速度以及实际加速度,目标运动信息中至少包括末端执行器的预期位置、预期速度以及预期加速度,误差运动信息中至少包括末端执行器的误差位置、误差速度以及误差加速度,目标神经网络控制器是基于目标模型训练神经网络得到的,目标模型是对骨科手术机器人进行动力学建模得到的。
13、在上述过程中,基于对骨科手术机器人进行动力学建模得到的目标模型训练神经网络,可以得到用于振动抑制的目标神经网络控制器;依据获取到的运动信息和目标运动信息可以获知振动情况(如得到误差运动信息),从而能够依据振动情况改变机械臂提供的主动等效阻尼,即依据目标神经网络控制器输出的第一控制指令和pd控制器输出的第二控制指令可以确定出机械臂的目标控制指令,将目标控制指令发送至机械臂的控制器,以降低机械臂的振动影响,有效减少末端执行器操作期间振动带来的位移而造成的精度损失,提高了末端执行器的工作精度。
14、由此可见,通过本发明的技术方案,达到了降低机械臂的振动影响,实现机械臂的平稳运行的目的,从而实现了提高末端执行器的工作精度的技术效果,进而解决了现有技术中采用额外加装阻尼垫片的被动减振方式抑制手术机器人的末端执行器振动,导致末端执行器的工作精度较低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!