基于弹簧的三自由度绳驱动即时变刚度基座
本发明涉及空间机械臂,尤其涉及一种基于弹簧的三自由度绳驱动即时变刚度基座。
背景技术:
1、随着中国空间站全面建成,愈加多样化、复杂的空间任务需要被完成。空间站上的机械臂在各种操作任务中的作用愈发广泛,从协助航天员舱外操作,到搬运、转移、插拔各类载荷等精细操作。这些任务都需要机械臂满足各种动态性能需求。
2、空间站上的机械臂系统由大臂和小臂两部分组成。两者可独立工作,也可以组成组合臂进一步扩展工作空间,去应对一些不仅需要范围转移,还要兼具局部精细操作的工作需求,大大提高了空间机械臂系统的机动性。而针对在地面开展组合臂的动态性能研究,一般可将作为基座的大臂等效为一个柔性基座,极大程度降低了试验系统的复杂度。
3、目前发现的已有设计的柔性基座是可变刚度,但不是时变刚度。只能预先调整好基座符合大臂某一构型下的刚度,然后小臂在这套基座刚度特性下运动,即模拟的是:大臂维持某一构型固定不动的前提下小臂运动的系统场景,无法实现小臂在运动过程中,基座的刚度也在由人为控制的实时变化,即无法模拟的是小臂运动的同时大臂也在动的系统场景。
技术实现思路
1、本发明为解决上述问题,提供一种基于弹簧的三自由度绳驱动即时变刚度基座,提供的柔性基座可以模拟大小臂组合时,大小臂相接处在多个自由度上的刚度特性,也是大臂作为小臂基座的表现出的刚度特性;并且以改变弹簧钢丝绳的预紧力的方式实现刚度的时变,即可模拟的是小臂运动的同时大臂也在动的系统场景。
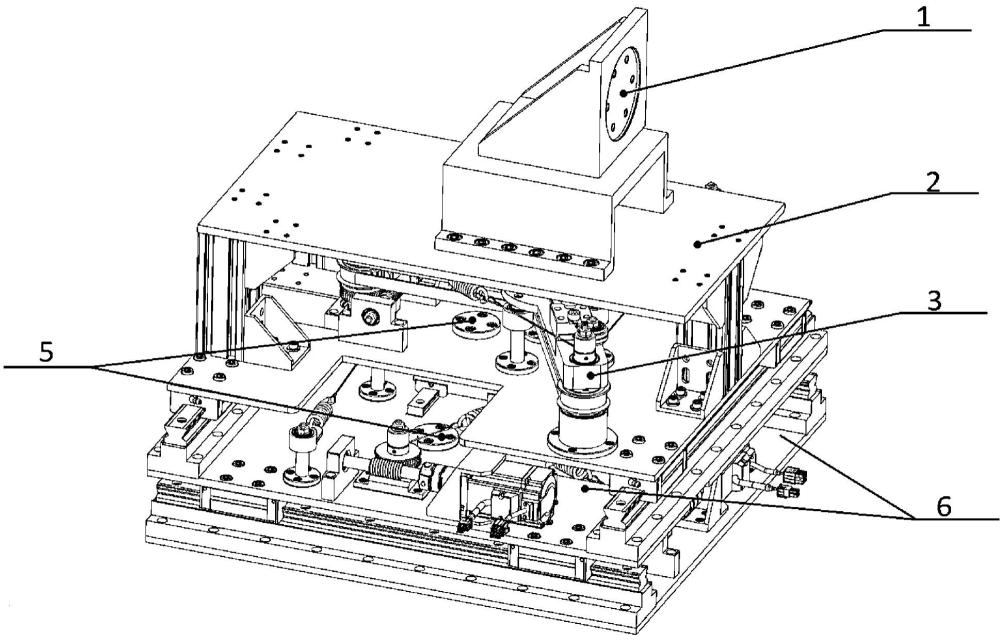
2、本发明提供的基于弹簧的三自由度绳驱动即时变刚度基座,包括柔性基座输入端、柔性基座盖板、转动刚度模拟平台和平动刚度模拟平台;其中:
3、柔性基座输入端通过支撑台安装到柔性基座盖板的顶面;转动刚度模拟平台通过连接架与柔性基座盖板的底面相连;平动刚度模拟平台通过传动轴与转动刚度模拟平台连接;
4、转动刚度模拟平台包括运动转换机构和转动变刚度机构;运动转换机构通过联轴器与柔性基座输入端连接,用于将柔性基座输入端的转动转换为向四周扩散的平动;转动变刚度机构同轴控制运动转换机构,通过实时控制转动变刚度机构对运动转换机构的预紧力,进而控制运动转换机构的运动刚度;
5、平动刚度模拟平台包括平动变刚度机构,转动刚度模拟平台通过传动轴与平动变刚度机构连接,通过控制转动刚度模拟平台在平动变刚度机构中运动的预紧力,进而实时控制柔性基座输入端的平动刚度。
6、进一步的,转动刚度模拟平台还包括支撑底板;其中,运动转换机构安装在转动变刚度机构上,转动变刚度机构安装在支撑底板上。
7、进一步的,运动转换机构包括转动支撑架、牵引转台、连杆和平动滑轨,以及与平动滑轨匹配的连接滑块;其中,
8、转动支撑架包括转动支撑台、转动支撑臂和不少于两个的转动支撑架底座,且转动支撑台和转动支撑臂为一体结构;转动支撑臂的数量与转动支撑架底座一致,转动支撑臂的一端均匀布置于转动支撑台的圆周,转动支撑臂的另一端安装在转动支撑架底座上,使转动支撑架底座通过转动支撑臂将转动支撑台架起;
9、平动滑轨与转动支撑臂的数量一致,并安装在转动支撑臂上;柔性基座输入端通过联轴器与牵引转台上同轴连接,连接滑块通过连杆与牵引转台相连,使柔性基座输入端的转动经牵引转台,通过连杆转换为连接滑块在平动滑轨的平动。
10、进一步的,转动变刚度机构包括转动导向轮、转动收绳轮、皮带轮、张紧轮和转动调刚电机;其中,
11、皮带轮和张紧轮的数量与转动支撑架底座的数量一致,皮带轮套装在转动支撑架底座上且低于转动支撑臂,使套装并连接皮带轮上的皮带低于转动支撑臂;张紧轮与皮带轮高度一致且沿转动支撑台的周向均匀分布,使张紧轮向转动支撑台的方向压紧皮带;
12、转动调刚电机固定在支撑底板上,且转动调刚电机的输出端通过联轴器与蜗杆相连,蜗杆与安装在任一皮带轮上的蜗轮啮合,使转动调刚电机通过蜗杆和蜗轮的配合控制皮带轮的转动,进而通过皮带控制其他皮带轮的转动;
13、转动收绳轮的数量与皮带轮的数量一致,且与皮带轮同轴安装在转动支撑架底座上,使皮带轮带动转动收绳轮进行同步旋转;转动导向轮的数量与转动收绳轮的数量一致,并靠近转动收绳轮安装在转动支撑臂上;
14、连接滑块上固定有与相邻转动支撑架底座上的转动收绳轮相连的弹簧钢丝绳,转动调刚电机通过皮带轮和转动收绳轮调整弹簧钢丝绳的预紧力,进而调整柔性基座输入端的转动刚度。
15、进一步的,弹簧钢丝绳的一端固定在连接滑块上,弹簧钢丝绳的另一端绕过导向轮固定在相邻转动支撑架底座上的收绳轮上。
16、进一步的,平动刚度模拟平台还包括平台底板、导轨组和调刚导轨,以及与调刚导轨配合的调刚滑块;其中,导轨组、调刚导轨和平动变刚度机构均安装在平台底板上,且支撑底板通过传动轴与调刚滑块连接;调刚导轨位于平动变刚度机构中,调刚滑块通过弹簧钢丝绳与平动变刚度机构相连,平动变刚度机构通过弹簧钢丝绳调整调刚滑块沿调刚导轨运动受到的预紧力,进而调整转动刚度模拟平台以及柔性基座输入端的平动刚度;两个导轨组平行于调刚导轨并固定在平台底板的两端,使导轨组带动转动刚度模拟平台进行平动。
17、进一步的,平动变刚度机构包括固定轮、固定导向轮、压绳轮、平动收绳轮和平动调刚电机;其中,固定轮和平动收绳轮位于调刚导轨的一端,压绳轮的数量为两个并固定在调刚滑块的两端;固定导向轮位于调刚导轨的另一端;弹簧钢丝绳的一端固定在固定轮上,弹簧钢丝绳的另一端依次经其中一个压绳轮、固定导向轮、另一个压绳轮后,固定在收绳轮上;
18、平动调刚电机固定在平台底板上,且平动调刚电机的输出端通过联轴器与蜗杆相连,蜗杆与安装在收绳轮上的蜗轮啮合,使平动调刚电机通过蜗杆和蜗轮的配合控制平动收绳轮的转动速度,进而通过弹簧钢丝绳控制调刚滑块沿调刚导轨运动受到的预紧力。
19、进一步的,在固定轮与压绳轮之间、压绳轮与固定导向轮之间、压绳轮与平动收绳轮之间布置有用于改变弹簧钢丝绳方向的导向轮。
20、进一步的,平动刚度模拟平台的数量不少于两个,每个平动刚度模拟平台的平台底板叠放在下方平动刚度模拟平台的导轨组上,每个平动刚度模拟平台的平台底板通过传动轴与下方平动刚度模拟平台的调刚滑块相连,使下方平动刚度模拟平台控制上方平动刚度模拟平台不同运动方向的平动刚度。
21、进一步的,平动刚度模拟平台的摆放方向即为各自的导轨组的方向,所有平动刚度模拟平台的摆放方向均不同。
22、与现有技术相比,本发明能够取得如下有益效果:
23、1)本发明提供的转动刚度模拟平台和平动刚度模拟平台可以实现同时变刚度调节;
24、2)通过叠加不少于两个的平动刚度模拟平台实现多自由度的刚度调节;
25、3)通过电机实现转动刚度模拟平台和平动刚度模拟平台的实时变刚度调节;
26、4)运动转换机构实现将柔性基座输入端的转动转换为平动,进而便于进行刚度调节。
- 还没有人留言评论。精彩留言会获得点赞!