机器人的控制参数的调节方法、装置和系统与流程
本技术涉及机器人的控制方法,具体而言,涉及一种机器人的控制参数的调节方法、装置和系统。
背景技术:
1、交流伺服系统的性能与其控制参数密切相关,为了获得满意的控制性能,必须对控制参数进行整定。同时为了适应不同的应用场合,以及单个场合运行条件的变化,伺服系统必须具备控制参数的自调整能力,使伺服系统的性能最优。
2、以电机端的速度、电流信号为依据进行参数自整定,未考虑电机端与机械末端无法完全对应的情况,由于同一条件下机器人末端的位置波形和电机端的位置波形差别较大,电机端的位置波形并不能完全反应机器人的实际运行情况,从而造成机器人的实际位移的误差超过了容许误差范围。
技术实现思路
1、本技术的主要目的在于提供一种机器人的控制参数的调节方法、装置和电子设备,以至少解决由于同一条件下机器人末端的位置波形和电机端的位置波形差别较大,电机端的位置波形并不能完全反应机器人的实际运行情况,从而造成机器人的实际位移的误差超过了容许误差范围的问题。
2、为了实现上述目的,根据本技术的一个方面,提供了一种机器人的控制参数的调节方法,机器人的控制参数包括位置环增益,该方法包括:
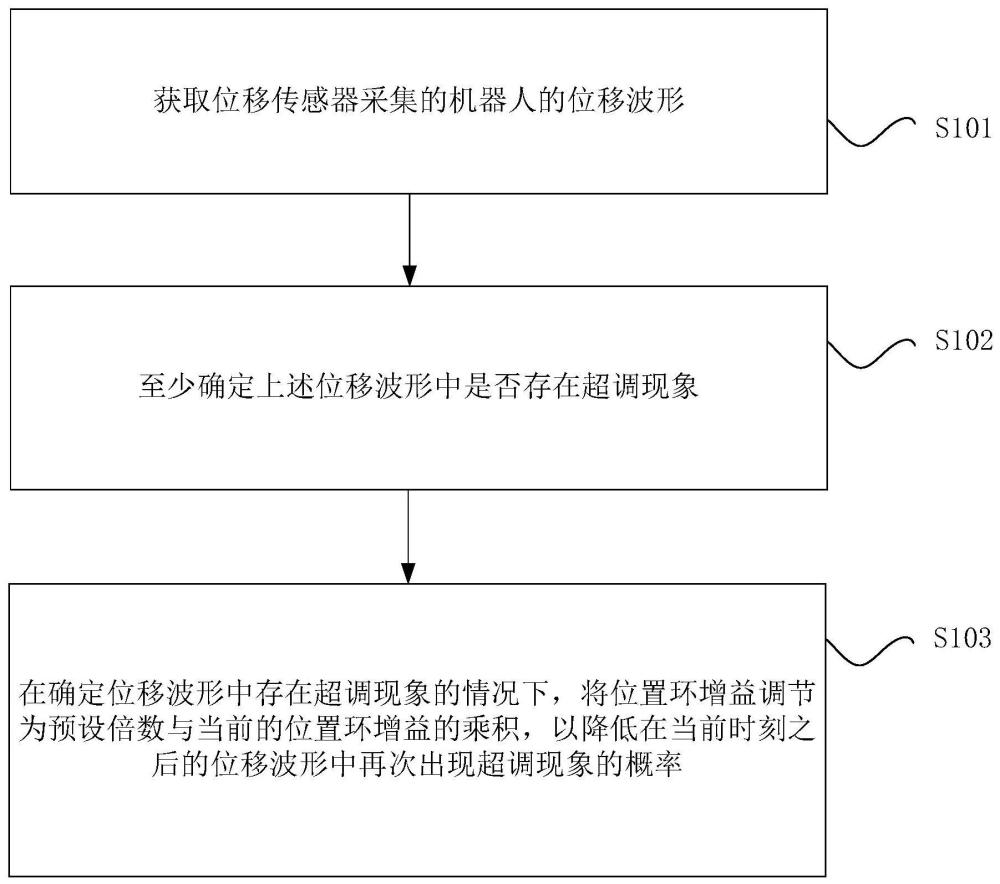
3、获取位移传感器采集的机器人的位移波形,所述位移传感器安装至所述机器人的边缘点上;
4、至少确定所述位移波形中是否存在超调现象;
5、在确定位移波形中存在超调现象的情况下,将位置环增益调节为预设倍数与当前的位置环增益的乘积,以降低在当前时刻之后的位移波形中再次出现超调现象的概率,所述超调现象表征所述机器人在移动过程中的位移超过预设位移的情况。
6、可选地,至少确定所述位移波形中是否存在超调现象,包括:
7、在确定位移波形中不存在超调现象的情况下,确定所述位移波形的抖动量的最大值是否大于或者等于抖动量阈值,所述抖动量的最大值为所述位移波形中所有的相邻的波峰和波谷的差值的绝对值中的最大值;
8、在确定所述位移波形的抖动量的最大值大于或者等于所述抖动量阈值的情况下,将第一陷波滤波器的滤波频率调节为第一滤波频率,所述第一滤波频率为与所述抖动量的最大值对应的所述位移波形中的相邻的波峰至波谷的频率,所述第一陷波滤波器用于对输入的所述机器人的位移规划信号进行滤波;
9、在确定所述位移波形的抖动量的最大值小于所述抖动量阈值的情况下,采用第一预设步长,提高所述位置环增益。
10、可选地,在将第一陷波滤波器的滤波频率调节为第一滤波频率之后,所述方法还包括:
11、再次获取位移传感器采集的机器人的位移波形,并再次确定所述位移波形的抖动量的最大值是否大于或者等于抖动量阈值;
12、在确定所述位移波形的抖动量的最大值大于或者等于所述抖动量阈值的情况下,将位置环增益调节为预设倍数与当前的位置环增益的乘积;
13、在确定所述位移波形的抖动量的最大值小于所述抖动量阈值的情况下,采用所述第一预设步长,提高当前的所述位置环增益。
14、可选地,在将位置环增益调节为预设倍数与当前的位置环增益的乘积之后,所述方法还包括:
15、采用第二预设步长,提高当前的速度前馈增益;
16、再次获取位移传感器采集的机器人的位移波形,并再次确定所述位移波形中是否存在超调现象,并确定所述位移传感器的定位时间是否小于定位时间阈值,所述定位时间为所述机器人开始运动的时刻和所述机器人停止的时刻之间的间隔时长;
17、在确定所述位移波形中不存在超调现象,且确定所述位移传感器的定位时间小于所述定位时间阈值的情况下,生成提示信息,以提示机器人的实际位移的误差处于容许误差范围内;
18、在确定所述位移波形中存在超调现象,和/或,确定所述位移传感器的定位时间大于或者等于所述定位时间阈值的情况下,根据当前的所述位置环增益和当前的所述速度前馈增益,确定是否生成报警信息,所述报警信息用于提示所述机器人需要维修。
19、可选地,根据当前的所述位置环增益和当前的所述速度前馈增益,确定是否生成报警信息,包括:
20、在当前的所述速度前馈增益不等于100%的情况下,采用所述第二预设步长,提高当前的所述速度前馈增益;
21、在当前的所述速度前馈增益等于100%的情况下,确定当前的所述位置环增益是否小于所述位置环增益的最小阈值;
22、在确定当前的所述位置环增益小于所述位置环增益的最小阈值的情况下,确定生成所述报警信息;
23、在确定当前的所述位置环增益大于或者等于所述位置环增益的最小阈值的情况下,确定不生成所述报警信息,并采用第三预设步长,降低当前的位置环增益,并将当前的速度前馈增益调节为0。
24、可选地,在获取位移传感器采集的机器人的位移波形之前,所述方法还包括:
25、将速度环增益系数调节预设倍数与当前的速度环增益系数的乘积;
26、采用第一预设步长,提高当前的所述位置环增益。
27、可选地,在将速度环增益系数调节预设倍数与当前的速度环增益系数的乘积之前,所述方法还包括:
28、采用第四预设步长,提高当前的速度环增益系数;
29、确定所述机器人在当前的速度曲线的波动量的最大值是否大于或者等于波动量阈值,所述波动量的最大值为所述当前的速度曲线中所有的相邻的波峰和波谷的差值的绝对值中的最大值;
30、在确定所述当前的速度曲线的波动量的最大值大于或者等于所述波动量阈值的情况下,将第二陷波滤波器的滤波频率调节为第二滤波频率,所述第二滤波频率为与所述波动量的最大值对应的所述当前的速度曲线中的相邻的波峰至波谷的频率,所述第二陷波滤波器用于对速度调节器输出的信号进行滤波;
31、在确定所述当前的速度曲线的波动量的最大值小于所述波动量阈值的情况下,再次采用第四预设步长,提高当前的速度环增益系数。
32、可选地,
33、在将第二陷波滤波器的滤波频率调节为第二滤波频率之后,所述方法还包括:再次确定所述机器人在当前的速度曲线的波动量的最大值是否大于或者等于所述波动量阈值;在确定所述机器人在当前的速度曲线的波动量的最大值小于所述波动量阈值的情况下,再次采用第四预设步长,提高当前的速度环增益系数;
34、采用第一预设步长,提高当前的所述位置环增益,包括:在确定所述机器人在当前的速度曲线的波动量的最大值大于或者等于所述波动量阈值的情况下,采用所述第一预设步长,提高当前的所述位置环增益。
35、根据本技术的另一方面,提供了一种机器人的控制参数的调节装置,机器人的控制参数包括位置环增益,该装置包括:
36、第一获取单元,用于获取位移传感器采集的机器人的位移波形,所述位移传感器安装至所述机器人的边缘点上;
37、第一确定单元,用于至少确定所述位移波形中是否存在超调现象;
38、第一处理单元,用于在确定位移波形中存在超调现象的情况下,将位置环增益调节为预设倍数与当前的位置环增益的乘积,以降低在当前时刻之后的位移波形中再次出现超调现象的概率,所述超调现象表征所述机器人在移动过程中的位移超过预设位移的情况。
39、根据本技术的另一方面,提供了一种机器人的控制参数的调节系统,该系统包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的机器人的控制参数的调节方法。
40、应用本技术的技术方案,相比传统的参数自整定方式,以位移传感器信号作为参数整定的依据,以机器人的边缘点的位移波形作为参数自整定的最终目标,该整定结果更符合伺服系统的实际使用场合的需求,从而解决了由于同一条件下机器人末端的位置波形和电机端的位置波形差别较大,电机端的位置波形并不能完全反应机器人的实际运行情况,从而造成机器人的实际位移的误差超过了容许误差范围的问题。
- 还没有人留言评论。精彩留言会获得点赞!