机器人关节装配辅助定位装置的制作方法
本发明涉及定位结构,特别是涉及一种机器人关节装配辅助定位装置。
背景技术:
1、协作机器人具备安全性好、轻量化、高灵活等特性,目前市场上以3kg~6kg级别的轻负载协作机器人为主。近年来,随着机械加工、汽车零部件等行业对大负载机器人的需求增加且传统工业机器人难以满足生产的柔性、灵活性需求,而轻型协作机器人又无法满足生产中大负载、高刚性的作业的要求,大负载协作机器人得以优势,在焊接、搬运、包装、码垛等领域多有应用。
2、大负载协作机器人需要配置刚度结构更高的关节模组,所以搭配的关节模组不论从尺寸和重量上来讲都要比传统协作机器人的关节要大很多,因此在机器人生产环节就大大提高了装配难度,想要实现快速且稳定的定位和装配,需要花费大量的时间和人工成本。
技术实现思路
1、本发明要解决的技术问题是提供一种能够降低装配难度、提高装配效率和装配时安全性的机器人关节装配辅助定位装置。
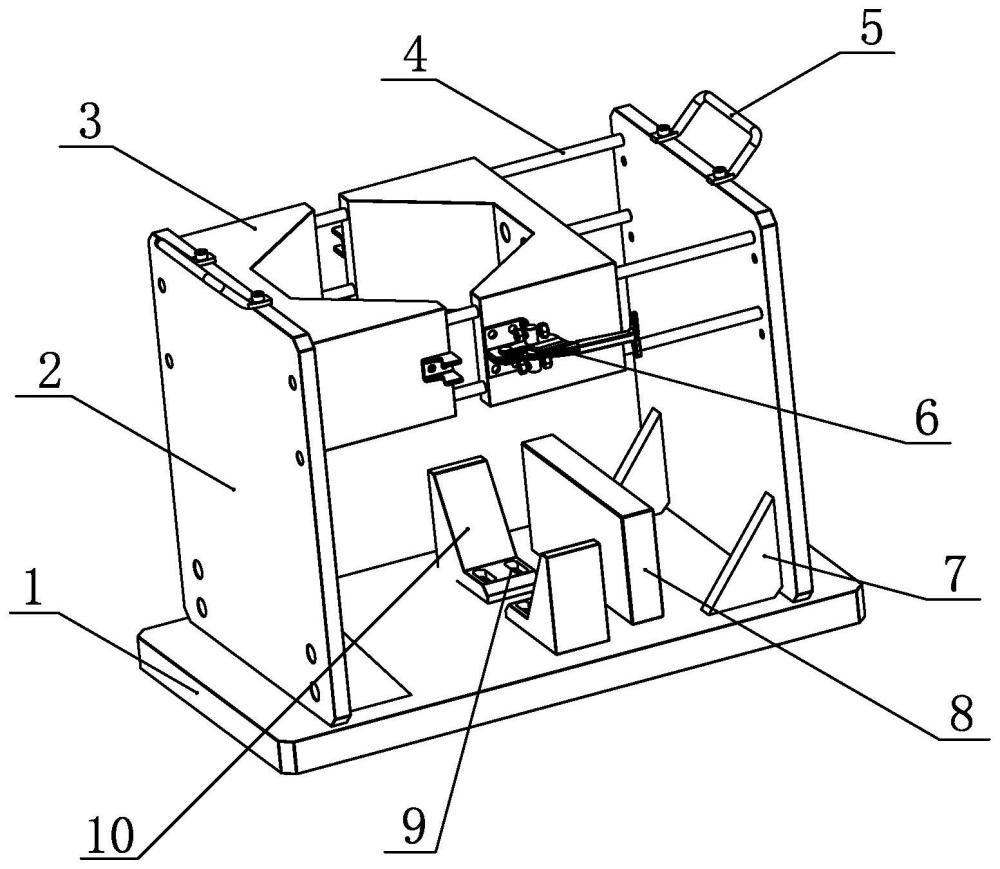
2、本发明机器人关节装配辅助定位装置,包括固定底座,固定底座上设置有侧面板,侧面板上设置有导向轴,导向轴上活动设置有夹紧块,夹紧块能够在导向轴上平移,固定底座上设置有底座定位块和挡块,安装机器人关节模组时,底座定位块和挡块分别与机器人本体下部的侧面和端面相接触。
3、本发明机器人关节装配辅助定位装置,其中所述夹紧块与导向轴为间隙配合。
4、本发明机器人关节装配辅助定位装置,其中所述夹紧块有两个,两个夹紧块相对的一侧预留有用于放置机器人本体的开槽。
5、本发明机器人关节装配辅助定位装置,其中两个夹紧块上分别设置有搭扣组件。
6、本发明机器人关节装配辅助定位装置,其中所述底座定位块为至少两个,分别位于固定底座上的前后两侧;挡块位于两个底座定位块的一侧。
7、本发明机器人关节装配辅助定位装置,其中所述底座定位块和挡块与固定底座连接的位置上均加工有腰型孔。
8、本发明机器人关节装配辅助定位装置,其中所述固定底座和侧面板之间安装有加强筋。
9、本发明机器人关节装配辅助定位装置,其中所述侧面板上设置有装置拉手。
10、本发明机器人关节装配辅助定位装置,其中所述夹紧块、底座定位块和挡块的材料为聚甲醛。
11、本发明机器人关节装配辅助定位装置与现有技术不同之处在于,本发明机器人关节装配辅助定位装置通过两个夹紧块、两个底座定位块和一个挡块的配合实现对机器人本体的定位,并且通过搭扣锁紧来保持定位,在机器人关节模组装入机器人本体时,可以进行快速有效定位,辅助完成装配。本发明机器人关节装配辅助定位装置降低了装配难度而且提升装配效率,避免装配过程中对设备造成损坏。
12、下面结合附图对本发明的机器人关节装配辅助定位装置作进一步说明。
技术特征:
1.一种机器人关节装配辅助定位装置,其特征在于:包括固定底座,固定底座上设置有侧面板,侧面板上设置有导向轴,导向轴上活动设置有夹紧块,夹紧块能够在导向轴上平移,固定底座上设置有底座定位块和挡块,安装机器人关节模组时,底座定位块和挡块分别与机器人本体下部的侧面和端面相接触。
2.根据权利要求1所述的机器人关节装配辅助定位装置,其特征在于:所述夹紧块与导向轴为间隙配合。
3.根据权利要求1所述的机器人关节装配辅助定位装置,其特征在于:所述夹紧块有两个,两个夹紧块相对的一侧预留有用于放置机器人本体的开槽。
4.根据权利要求3所述的机器人关节装配辅助定位装置,其特征在于:两个夹紧块上分别设置有搭扣组件。
5.根据权利要求1所述的机器人关节装配辅助定位装置,其特征在于:所述底座定位块为至少两个,分别位于固定底座上的前后两侧;挡块位于两个底座定位块的一侧。
6.根据权利要求1所述的机器人关节装配辅助定位装置,其特征在于:所述底座定位块和挡块与固定底座连接的位置上均加工有腰型孔。
7.根据权利要求1所述的机器人关节装配辅助定位装置,其特征在于:所述固定底座和侧面板之间安装有加强筋。
8.根据权利要求1所述的机器人关节装配辅助定位装置,其特征在于:所述侧面板上设置有装置拉手。
9.根据权利要求1所述的机器人关节装配辅助定位装置,其特征在于:所述夹紧块、底座定位块和挡块的材料为聚甲醛。
技术总结
本发明机器人关节装配辅助定位装置涉及一种机械定位结构。其目的是为了提供一种能够降低装配难度、提高装配效率和装配时安全性的机器人关节装配辅助定位装置。本发明机器人关节装配辅助定位装置包括固定底座,固定底座上设置有侧面板,侧面板上设置有导向轴,导向轴上活动设置有夹紧块,夹紧块能够在导向轴上平移,固定底座上设置有底座定位块和挡块,安装机器人关节时,底座定位块和挡块分别与机器人关节下部的侧面和端面相接触。在机器人关节模组装入机器人本体时,本发明机器人关节装配辅助定位装置能够进行快速有效定位,辅助完成装配。本发明机器人关节装配辅助定位装置降低了装配难度而且提升装配效率,避免装配过程中对设备造成损坏。
技术研发人员:齐高奇,李占,杨智恺,李振国,周旭东,刘宁宁,于文进
受保护的技术使用者:珞石(山东)智能科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!