一种模块化的机器人应用模块的安装方法与流程
本发明涉及机器人,尤其涉及模块化的康复机器人领域。
背景技术:
1、现有技术中,机器人功能单一,需要通过更换应用模块来拓展机器人的功能,以康复机器人为例,应用模块包括但不限于把手、臂托、绳索、脚踏板等。但是在更换应用模块时,由于连接端视觉上被遮挡,因此无法判断是否安装完成。
2、因此,急需一种易于安装且方便判断是否安装完成的方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种模块化的机器人应用模块的安装方法,能够准确判断是否安装完成。
2、为实现上述目的,本发明提供了一种模块化的机器人应用模块的安装方法,所述机器人包括机器人主体和应用模块,所述安装方法包括步骤:
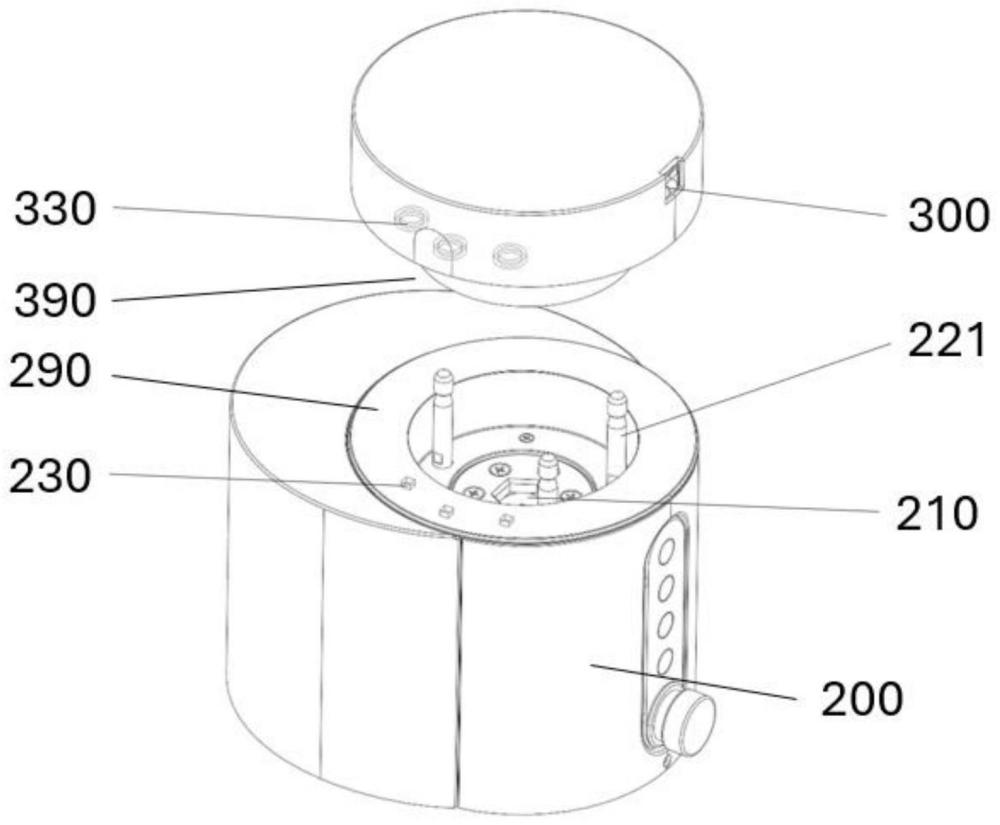
3、s1、提供机器人主体和应用模块,所述机器人主体包括动力输出部和导向锁定部,所述动力输出部和导向锁定部均设置于所述机器人主体的连接端,所述应用模块包括动力承接部和模块锁止机构,动力承接部和模块锁止机构均设置于所述应用模块的连接端,所述动力承接部与所述动力输出部配合,用于实现动力的传递;
4、s2、执行所述应用模块插入机器人主体的所述导向锁定部的动作;
5、s3、判断所述应用模块是否向所述机器人主体靠近,如果是,则执行转动所述动力输出部的动作;
6、s4、判断所述机器人主体的动力输出部的受力是否变化,如果是,则确定所述应用模块安装成功;
7、s5、执行模块锁止机构锁定所述导向锁定部的动作。
8、可选的,在所述步骤s3中,还包括识别所述应用模块的类型。
9、可选的,在所述步骤s1中,提供的机器人主体设置传感器,提供的应用模块设置与所述传感器配合的被感应装置;所述传感器和被感应装置用于在所述步骤s3中判断所述应用模块是否向所述机器人主体靠近和识别所述应用模块的类型。
10、可选的,所述传感器设置于所述机器人主体的连接端,所述被感应装置设置于所述应用模块的连接端,所述传感器与所述被感应装置的位置对应。
11、可选的,所述传感器为霍尔传感器、所述被感应装置为磁铁,或所述传感器为rfid传感器、所述被感应装置为标签,或所述传感器为光学传感器、所述被感应装置为光学标记,或所述传感器为电容传感器、所述被感应装置为末端特殊形状的配合。
12、可选的,所述传感器和所述被感应装置的个数均为3个。
13、可选的,在所述步骤s1中,所述导向锁定部沿着第一方向延伸,所述第一方向垂直于所述机器人主体的连接端。
14、可选的,在所述步骤s4中,判断所述机器人主体的动力输出部的受力是否变化具体为:判断所述机器人的动力输出部的力矩是否大于等于设定阈值。
15、与现有技术相比,本发明的有益效果是:
16、本发明的安装方法判断应用模块是否安装成功,避免了因视觉盲区而导致的无法判断是否安装成功的问题。
技术特征:
1.一种模块化的机器人应用模块的安装方法,所述机器人包括机器人主体和应用模块,其特征在于,所述安装方法包括步骤:
2.根据权利要求1所述的安装方法,其特征在于,在所述步骤s3中,还包括识别所述应用模块的类型。
3.根据权利要求2所述的安装方法,其特征在于,在所述步骤s1中,提供的机器人主体设置传感器,提供的应用模块设置与所述传感器配合的被感应装置;所述传感器和被感应装置用于在所述步骤s3中判断所述应用模块是否向所述机器人主体靠近和识别所述应用模块的类型。
4.根据权利要求3所述的安装方法,其特征在于,所述传感器设置于所述机器人主体的连接端,所述被感应装置设置于所述应用模块的连接端,所述传感器与所述被感应装置的位置对应。
5.根据权利要求3所述的安装方法,其特征在于,所述传感器为霍尔传感器、所述被感应装置为磁铁,或所述传感器为rfid传感器、所述被感应装置为标签,或所述传感器为光学传感器、所述被感应装置为光学标记,或所述传感器为电容传感器、所述被感应装置为末端特殊形状的配合。
6.根据权利要求1所述的安装方法,其特征在于,所述传感器和所述被感应装置的个数均为3个。
7.根据权利要求1所述的安装方法,其特征在于,在所述步骤s1中,所述导向锁定部沿着第一方向延伸,所述第一方向垂直于所述机器人主体的连接端。
8.根据权利要求7所述的安装方法,其特征在于,在所述步骤s4中,判断所述机器人主体的动力输出部的受力是否变化具体为:判断所述机器人主体的动力输出部的力矩是否大于等于设定阈值。
技术总结
本发明公开了一种模块化的机器人应用模块的安装方法,包括步骤:S1、提供机器人主体和应用模块;S2、执行所述应用模块插入机器人主体的所述导向锁定部的动作;S3、判断所述应用模块是否向所述机器人主体靠近,如果是,则执行转动所述动力输出部的动作;S4、判断所述机器人主体的动力输出部的受力是否变化,如果是,则确定所述应用模块安装成功;S5、执行模块锁止机构锁定所述导向锁定部的动作。本发明通过安装方法判断应用模块是否安装成功,避免了因视觉盲区而导致的无法判断是否安装成功的问题。
技术研发人员:常春阳,李希佳,袁成杰,施吉超,师云雷
受保护的技术使用者:上海如身机器人科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!