智能高空作业机器人的制作方法
本申请涉及智能机器人,尤其涉及一种智能高空作业机器人。
背景技术:
1、随着科技的发展,信息传播的方式也日新月异,通过画面将信息以视觉的方式向人群传播,能令人印象深刻,传播范围广且传播效率高。led显示屏能够显示出各种各样的画面,其应用越来越广泛。为了使led显示屏显示的画面的传播范围更加广泛,led显示屏的面积往往设定得较大,并且安装高度较高。
2、当led显示屏发生故障,即需要对led显示屏进行维修。led显示屏往往是通过led显示模块拼接而成的,led显示模块通过固定螺丝固定于主体结构。当单块led显示模块损坏后,需要将损坏的led显示模块拆下,更换为能正常工作的led显示模块。目前对led显示屏的维护往往是通过人工完成的,在人工维护led显示屏的过程中,需要维护人员高空作业,这样危险系数高,工作难度大。并且在维修大型led显示屏时,若故障点相隔较远,则需要工作人员移动较远的距离,进一步增加了工作的危险性。
3、可见,如何提高维护led显示屏过程的安全性是亟待解决的技术问题。
技术实现思路
1、本申请提供的一种智能高空作业机器人,旨在解决现有技术中如何提高维护led显示屏过程的安全性的技术问题。
2、本申请提供的一种智能高空作业机器人,包括:
3、机器人主体;
4、维修模块,所述维修模块用于维修待维修件;
5、视觉模块,所述视觉模块用于获取所述待维修件的图像信息;
6、飞行模块,所述飞行模块用于带动所述机器人主体飞行;
7、距离检测模块,所述距离检测模块用于检测所述机器人主体与待维修件之间的距离;
8、第一固定装置,所述第一固定装置用于在维修过程中使所述机器人主体与所述待维修件的位置保持稳定;
9、其中,所述维修模块、所述飞行模块、所述距离检测模块以及所述第一固定装置均安装于所述机器人主体。
10、更进一步地,所述飞行模块包括:
11、至少一个旋翼机构;
12、转向机构,所述转向机构用于调节所述旋翼机构与所述机器人主体之间的夹角;
13、其中,所述旋翼机构通过所述转向机构与所述机器人主体相连。
14、更进一步地,所述转向机构包括:
15、第一支架组件,所述第一支架组件固定安装于所述机器人主体;
16、第一驱动装置,所述第一驱动装置安装于所述第一支架组件;
17、第二支架组件,所述第二支架组件安装于所述第一驱动装置的动力输出端,所述第一驱动装置驱动所述第二支架组件朝第一方向转动;
18、第二驱动装置,所述第二驱动装置安装于所述第二支架组件;
19、第三支架组件,所述第三支架组件安装于所述第二驱动装置的动力输出端,所述第二驱动装置带动所述第三支架组件朝第二方向转动;
20、其中,所述旋翼机构安装于所述第三支架组件,所述第一方向与所述第二方向交叉。
21、更进一步地,所述飞行模块包括:
22、驱动电机,所述驱动电机安装于所述机器人主体;
23、旋转叶片,所述旋转叶片安装于所述驱动电机的动力输出端,所述驱动电机带动所述旋转叶片转动。
24、更进一步地,所述飞行模块的数量至少为四个。
25、更进一步地,所述维修模块包括:
26、拆装装置,所述拆装装置用于拆装固定所述待维修件的螺丝;
27、取放装置,所述取放装置用于在安装位置取放所述待维修件;
28、移动装置,所述移动装置用于带动所述拆装装置与所述取放装置中的至少一个移动。
29、更进一步地,所述拆装装置包括:
30、驱动机构,所述驱动机构安装于所述移动装置;
31、拧动机构,所述拧动机构与所述驱动机构相连;
32、其中,所述拧动机构根据所述图像信息对准安装所述待维修件的螺丝孔,所述驱动机构带动所述拧动机构顺时针转动或者逆时针转动。
33、更进一步地,所述驱动机构包括电机装置和传动装置,所述传动装置与所述电机装置相连,所述传动装置设置有第一螺纹孔;
34、所述拧动机构包括螺杆、缓冲件和拆装工具头,所述拆装工具头通过所述缓冲件安装于所述螺杆端部,所述螺杆与所述第一螺纹孔相适配。
35、更进一步地,所述取放装置包括:
36、第三移动组件,所述第三移动组件的移动方向朝向靠近或远离待维修件方向;
37、至少一个对接组件,所述对接组件分散布置,所述第三移动组件带动所述对接组件移动;
38、其中,在取出待维修件的过程中,所述对接组件伸入所述待维修件的螺丝孔。
39、更进一步地,所述取放装置包括:
40、第一装载组件,所述第一装载组件用于装载拆除后的所述待维修件,所述第一装载组件位于所述取放装置的运动轨迹处;
41、第二装载组件,所述第二装载组件用于装载替换件,所述第二装载组件位于所述取放装置的运动轨迹处。
42、本申请所达到的有益效果是:
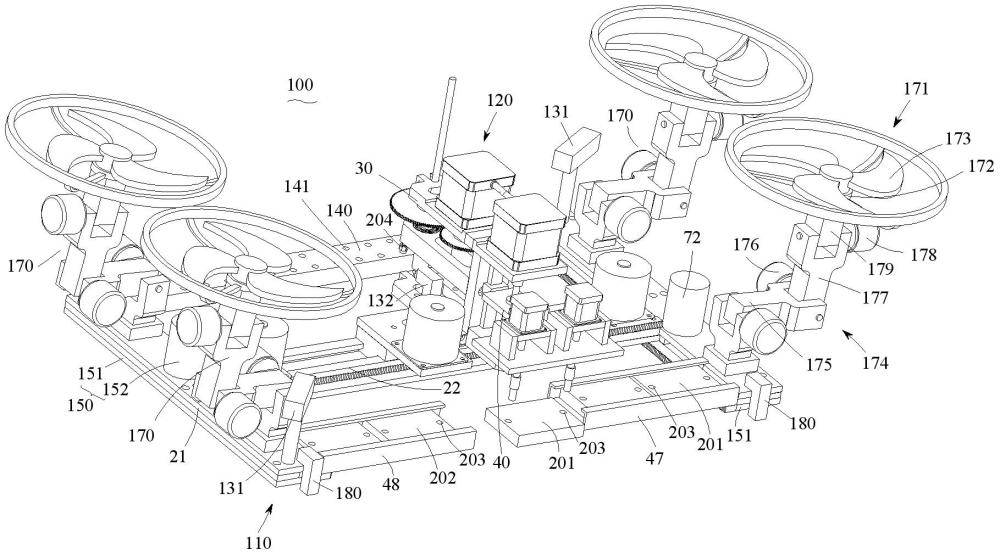
43、本申请提出的一种智能高空作业机器人,通过飞行模块带动机器人主体升高至led显示屏的高度,并带动机器人主体相对led显示屏移动,通过视觉模块对led显示屏进行扫描检测,从而获取待维修件的图像信息,进而确定待维修件的数量和位置。通过飞行模块根据待维修件的位置信息带动机器人主体飞行至受损的待维修件处,并通过维修模块对待维修件进行维修。通过距离检测模块检测机器人主体与led显示屏组件的距离,进而避免机器人主体靠近led显示屏的过程中撞伤led显示屏。在对led显示屏的过程中,通过第一固定装置固定机器人主体,使机器人主体与led显示屏保持相对固定,从而使维修模块能稳定工作。在维修模块工作的过程中,通过视觉模块获取待维修件的图像信息,以便维修模块能对待维修件的故障点进行维修。如此,通过智能高空作业机器人对led显示屏进行维修,免除工作人员高空作业,提高维护led显示屏过程的安全性。
技术特征:
1.一种智能高空作业机器人,其特征在于,包括:
2.根据权利要求1所述的智能高空作业机器人,其特征在于,所述飞行模块包括:
3.根据权利要求2所述的智能高空作业机器人,其特征在于,所述转向机构包括:
4.根据权利要求1所述的智能高空作业机器人,其特征在于,所述飞行模块包括:
5.根据权利要求1-4中任意一项所述的智能高空作业机器人,其特征在于,所述飞行模块的数量至少为四个。
6.根据权利要求1所述的智能高空作业机器人,其特征在于,所述维修模块包括:
7.根据权利要求6所述的智能高空作业机器人,其特征在于,所述拆装装置包括:
8.根据权利要求7所述的智能高空作业机器人,其特征在于,所述驱动机构包括电机装置和传动装置,所述传动装置与所述电机装置相连,所述传动装置设置有第一螺纹孔;
9.根据权利要求6所述的智能高空作业机器人,其特征在于,所述取放装置包括:
10.根据权利要求6所述的智能高空作业机器人,其特征在于,所述取放装置包括:
技术总结
本申请涉及智能机器人技术领域,尤其涉及一种智能高空作业机器人。通过飞行模块带动机器人主体升高至LED显示屏的高度,并带动机器人主体相对LED显示屏移动,通过视觉模块对LED显示屏进行扫描检测,进而确定待维修件的数量和位置。通过飞行模块根据待维修件的位置信息带动机器人主体飞行至受损的待维修件处,对待维修件进行维修。通过第一固定装置固定机器人主体,使机器人主体与LED显示屏保持相对固定,从而使维修模块能稳定工作。在维修模块工作的过程中,通过视觉模块获取待维修件的图像信息,以便维修模块能对待维修件的故障点进行维修。如此,通过智能高空作业机器人对LED显示屏进行维修,免除工作人员高空作业,提高维护LED显示屏过程的安全性。
技术研发人员:朱海涛,钟涛,李鸥
受保护的技术使用者:深圳市元亨光电股份有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!