一种机械臂的制作方法
本发明涉及机器人,尤其涉及一种机械臂。
背景技术:
1、现有的机械臂普遍采用应变片式力传感器进行力矩检测,然而,这种传统的测量方式存在以下问题:首先,应变片式力传感器在长期受力后,会出现蠕变现象,即在恒定的应力作用下,应变会随着时间的推移而逐渐增大,导致测量结果不准确;其次,应变片式力传感器受温度影响较大,温度的变化会引起传感器输出信号的漂移,温漂使得应变片式力传感器在不同的环境温度下的测量结果出现偏差,影响力矩测量的精度;最后,应变片式力传感器本身的测量精度较低,这也是不利于提高力矩检测精度的一个重要因素。
2、因此,针对现有技术采用应变片式力传感器在机械臂中检测力矩所存在的蠕变、温漂及低精度问题,有必要研发一种新型机械臂,以克服上述问题,实现力矩的高精度测量。
技术实现思路
1、基于以上所述,本发明的目的在于提供一种机械臂,能够有效克服或减少蠕变和温漂的影响,并且提供更高的测量精度,满足现代工业和科研领域对力矩测量准确性的要求。
2、为达上述目的,本发明采用以下技术方案:
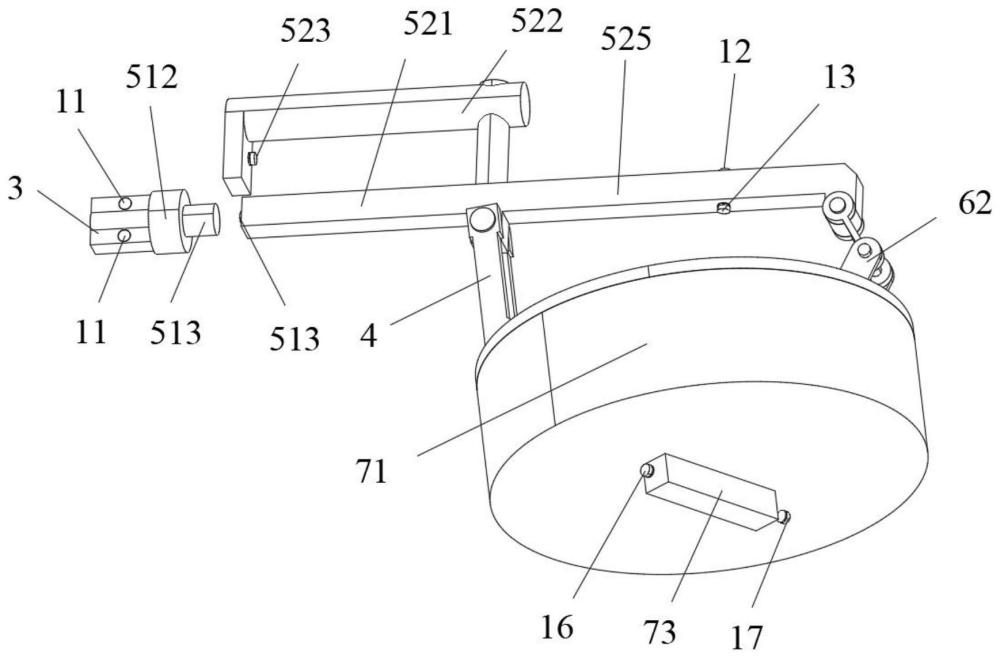
3、一种机械臂,包括力矩测量组件,所述力矩测量组件包括第一力矩连接件、第二力矩连接件及第一力传感器组,所述第一力矩连接件上设有力矩测量腔室,所述第二力矩连接件的一端伸入所述力矩测量腔室内,所述第一力传感器组位于所述力矩测量腔室内且包括第一mems力传感器和第二mems力传感器,所述第一mems力传感器和所述第二mems力传感器分别设置在所述第二力矩连接件的相对两侧,所述第一mems力传感器和所述第二mems力传感器均用于检测所述第一力矩连接件相对于所述第二力矩连接件沿第一预设方向转动时的剪切力;所述第一mems力传感器和所述第二mems力传感器均为芯片式力传感器,所述芯片式力传感器包括固定座、金属密封膜、测力芯片、端盖及压环,所述金属密封膜固定在所述固定座上且两者形成能够容纳液体的液体腔室,所述测力芯片设置在所述固定座上且能够检测所述液体腔室内的液压,所述固定座上设有凸台,所述压环固定在所述金属密封膜上且正对所述凸台设置,以使所述金属密封膜夹设在所述压环和所述凸台之间,所述端盖上设有避让豁口,所述金属密封膜包括金属波纹片和金属平片,所述端盖固定在所述金属平片上且所述端盖与所述金属密封膜在所述避让豁口处形成可变形间隙,所述端盖与所述压环间隔设置。
4、作为一种机械臂的优选方案,所述力矩测量腔室的横截面的形状为长方形,所述第二力矩连接件伸入所述力矩测量腔室内的一端为与所述力矩测量腔室配合的方块连接件,所述第一mems力传感器和所述第二mems力传感器分别设置在所述方块连接件的相对两侧。
5、作为一种机械臂的优选方案,所述机械臂还包括支架、转动组件及第二力传感器组,所述转动组件的中部沿第二预设方向可转动设置在所述支架上,所述转动组件的一端与所述第一力矩连接件和所述第二力矩连接件中的一个相连,所述第二预设方向与所述第一预设方向垂直,所述第二力传感器组包括第三mems力传感器和第四mems力传感器,所述第三mems力传感器和所述第四mems力传感器沿第三预设方向设置在所述转动组件内且用于检测沿所述第三预设方向的作用力,所述第三预设方向分别与所述第一预设方向和所述第二预设方向垂直。
6、作为一种机械臂的优选方案,所述机械臂还包括第三力传感器组,所述第三力传感器组包括第五mems力传感器和第六mems力传感器,所述转动组件包括第一连接臂和能够沿抽离和伸入所述第一连接臂的轴线方向滑动的第二连接臂,所述第五mems力传感器和第六mems力传感器分别用于检测所述第二连接臂沿抽离和伸入所述第一连接臂的轴线方向的作用力。
7、作为一种机械臂的优选方案,所述第一连接臂包括第一连接套筒和第一连接座,所述第一连接座的两端分别与所述第一连接套筒和所述力矩测量组件相连,所述第二连接臂包括第一内轴和第二连接座,所述第二连接座位于所述第一连接套筒的外侧,至少部分所述第一内轴伸入所述第一连接套筒内且所述第一连接套筒内设有第五mems力传感器,所述第一内轴的一端设有与所述第五mems力传感器对应的第一压块,所述第一连接套筒的外壁上设有第六mems力传感器,所述第二连接座上设有与所述第六mems力传感器对应的第二压块。
8、作为一种机械臂的优选方案,所述机械臂还包括旋转台和转动连接件,所述支架固定在所述旋转台上,所述转动组件的另一端通过所述转动连接件与所述旋转台转动连接,所述旋转台能够带动所述第一力矩连接件、所述第二力矩连接件、所述转动组件及所述支架旋转。
9、作为一种机械臂的优选方案,所述机械臂还包括第一底座、第二底座、直线导轨及第四力传感器组,所述直线导轨固定在所述第一底座的底部,所述直线导轨沿所述第二预设方向可滑动设置在所述第二底座上,所述旋转台可转动设置在所述第一底座上,所述第四力传感器组包括第七mems力传感器和第八mems力传感器,所述第七mems力传感器和所述第八mems力传感器分别设置在所述直线导轨沿自身长度方向的两端,所述第七mems力传感器和所述第八mems力传感器用于检测所述第二预设方向的作用力。
10、作为一种机械臂的优选方案,所述机械臂还包括第五力传感器组,所述第五力传感器组包括第九mems力传感器和第十mems力传感器,所述旋转台包括第一旋转子台和第二旋转子台,所述第一旋转子台上设有第一旋转槽和第二旋转槽,所述第二旋转子台上设有第一旋转凸台和第二旋转凸台,所述第一旋转凸台装配在所述第一旋转槽内且所述第二旋转凸台装配在所述第二旋转槽内,以使所述第一旋转子台能够带动所述第二旋转子台沿第四预设方向旋转,所述第九mems力传感器设置在所述第一旋转子台的侧壁或者所述第一旋转槽的侧壁上,所述第十mems力传感器设置在所述第二旋转子台的侧壁或者所述第二旋转槽的侧壁上,所述第九mems力传感器和所述第十mems力传感器用于检测所述第一旋转子台和所述第二旋转子台沿第四预设方向转动时的剪切力。
11、作为一种机械臂的优选方案,所述第三mems力传感器、所述第四mems力传感器、所述第五mems力传感器、所述第六mems力传感器、所述第七mems力传感器、所述第八mems力传感器、所述第九mems力传感器及所述第十mems力传感器均为所述芯片式力传感器,所述凸台包括内圈凸台和外圈凸台,所述内圈凸台与所述金属密封膜形成内圈腔室,所述外圈凸台、所述内圈凸台及所述金属密封膜之间形成外圈腔室,所述内圈凸台上设有连通所述内圈腔室和所述外圈腔室的连通孔,所述内圈腔室和所述外圈腔室组成所述液体腔室,所述内圈腔室内的所述金属密封膜为所述金属波纹片,所述外圈腔室内的所述金属密封膜为所述金属平片,所述压环包括内压环和外压环,所述内压环正对所述内圈凸台设置,所述外压环正对所述外圈凸台设置。
12、作为一种机械臂的优选方案,所述端盖上设有内圈避让槽和外圈避让槽,所述内压环和至少部分所述内圈凸台均伸入所述内圈避让槽内,所述外压环和至少部分所述外圈凸台均伸入所述外圈避让槽内。
13、本发明的有益效果为:
14、本发明公开的机械臂,采用第一mems力传感器和第二mems力传感器检测第一预设方向的剪切力,由于力臂确定,因此可以根据剪切力得到力矩,实现力矩的测量,由于第一mems力传感器和第二mems力传感器均为使用了mems技术的芯片式力传感器,不同于现有的应变片式力传感器,该芯片式力传感器的测力芯片检测的液体腔室内的液压即为所要测量的剪切力,即使长时间受压其性能也不会发生显著变化,保证了测量结果的稳定性,具有较高的抗蠕变性能;可变形间隙的存在使得金属密封膜发生变形,端盖沿作用力的方向移动,当作用力达到预设力值时,可变形间隙内的金属密封膜与端盖贴合,阻碍端盖继续移动,此时金属密封膜的金属波纹片与端盖的端面抵接,金属波纹片受压后变形使得端盖与金属密封膜的接触面积增大,能够降低芯片式力传感器内部的压强,实现自我保护,此外,该芯片式力传感器还具有温漂小、较高的检测精度和高可靠性的优点,提高了机械臂在不同温度下对力矩检测的准确性和可靠性,延长了机械臂的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!