具有自主导航和智能巡检功能的水电厂发电机层轮式机器人的制作方法
本发明涉及巡检机器人,具体为具有自主导航和智能巡检功能的水电厂发电机层轮式机器人。
背景技术:
1、水电厂发电机层运行时,需要人员每天对设备进行巡视检查,但由于厂区面积大,巡检线路众多,所以需要配置大量的人员,配置大量的人员必然会增加水电厂的生产成本,因此,需要使用水电厂发电机层轮式机器人来进行智能巡检且机器人需要实现自主导航。
2、目前具有自主导航和智能巡检功能的水电厂发电机层轮式机器人在使用时,多是采用电池包作为动力来源,而电池包的电量有限,需要在低电量时进行更换,采用人工更换的效率较差,因此需要设计相应的能够自动更换电池包的设备,来满足机器人的正常使用,进而来提高机器人的使用效率,针对上述问题,发明人提出具有自主导航和智能巡检功能的水电厂发电机层轮式机器人用于解决上述问题。
技术实现思路
1、为了解决目前具有自主导航和智能巡检功能的水电厂发电机层轮式机器人在使用时,多是采用电池包作为动力来源,而电池包的电量有限,需要在低电量时进行更换,采用人工更换的效率较差,因此需要设计相应的能够自动更换电池包的设备,来满足机器人的正常使用,进而来提高机器人的使用效率的问题;本发明的目的在于提供具有自主导航和智能巡检功能的水电厂发电机层轮式机器人。
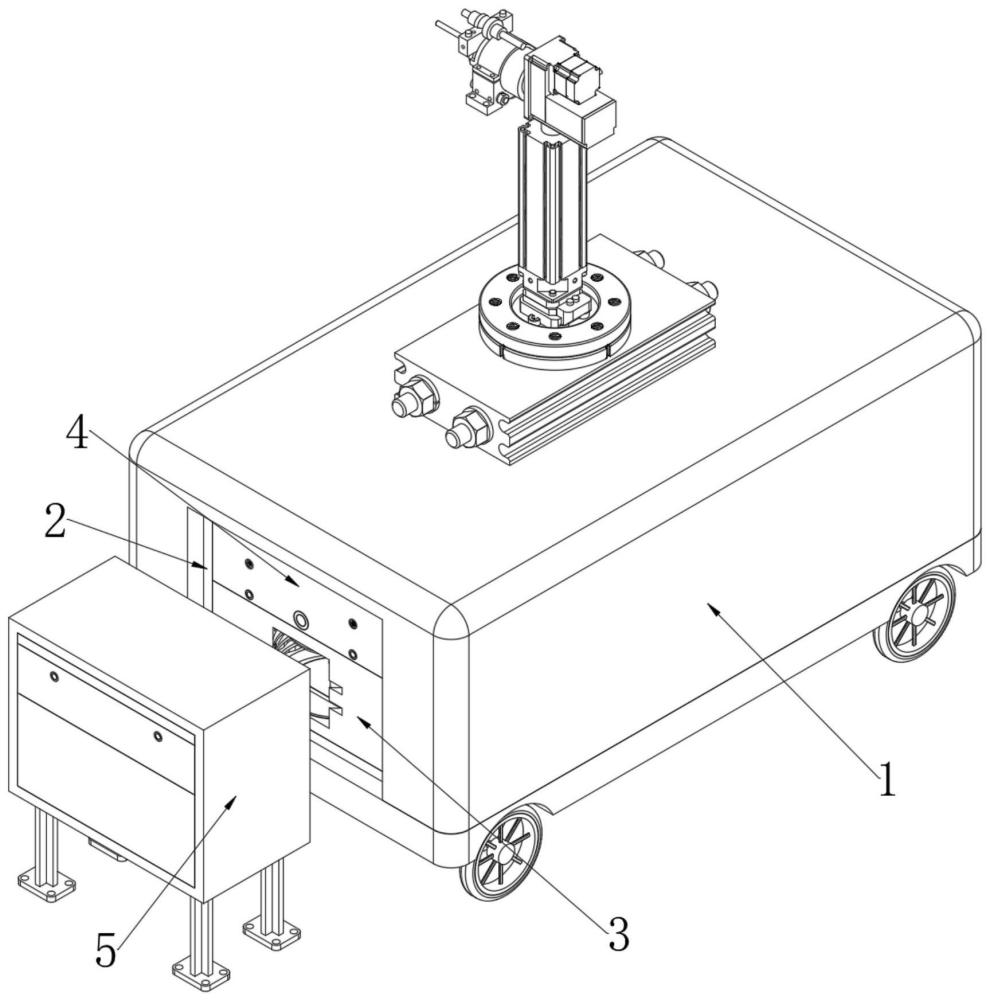
2、为解决上述技术问题,本发明采用如下技术方案:具有自主导航和智能巡检功能的水电厂发电机层轮式机器人,包括机器人本体,所述机器人本体一侧固定安装有设备框,所述设备框内部底端固定安装有换电机构,所述设备框内部顶端固定安装有驱动机构,所述机器人本体外侧设有与之配合使用的充电机构,所述换电机构和充电机构内部均设有若干个摆臂组件。
3、优选地,所述换电机构包括有放置电池包的第一设备箱,且第一设备箱固定安装在设备框内部底端,所述第一设备箱上转动设有一个第一转动轴、水平分布的两个第二转动轴和矩形分布的四个第三转动轴,且第一转动轴位于矩形分布的四个第三转动轴中心处,所述第一转动轴顶端固定安装有第一锥齿轮,所述第一转动轴上固定安装有上下分布的两个可对电池包进行夹持输送的输送盘,且两个输送盘能够在第一设备箱内部转动,所述第二转动轴顶端固定安装有第二锥齿轮,所述第三转动轴顶端固定安装有第三锥齿轮。
4、优选地,所述驱动机构包括有水平分布的三个支撑板,且三个支撑板的顶端和底端分别与设备框内部顶端和第一设备箱顶端固定连接,位于一侧的两个所述支撑板下端转动设有一个第一传动轴和两个第二传动轴,三个所述支撑板上端转动设有两个第三传动轴,所述第一传动轴上固定安装有第四锥齿轮,且第四锥齿轮与第一锥齿轮啮合,所述第二传动轴上固定安装有对称分布的两个第五锥齿轮,且两个第二传动轴上的第五锥齿轮错位分布,两个所述第二传动轴上的四个第五锥齿轮分别与四个第三锥齿轮啮合,所述第二传动轴一端固定安装有第一齿轮,所述第三传动轴上固定安装有第六锥齿轮,且两个第六锥齿轮分别与两个第二锥齿轮啮合,所述第三传动轴上固定安装有第二齿轮。
5、优选地,所述设备框内部顶端和第一设备箱顶端之间固定安装有一组第一轴承座和两组第二轴承座,且两组第二轴承座分别位于第一轴承座靠近支撑板的两侧,一组所述第一轴承座、两组第二轴承座和位于中部的支撑板上转动设有驱动轴,所述第一轴承座上转动设有第四传动轴,所述设备框内部顶端固定安装有伺服电机,且伺服电机输出端与驱动轴一端固定连接,所述驱动轴外圈固定安装有两个第一缺角转盘和两个第一扇形齿轮。
6、优选地,所述驱动轴一端固定安装有第二缺角转盘和第二扇形齿轮,所述第一传动轴外圈固定安装有第三齿轮和第一弧形卡盘,所述第二缺角转盘外圈能够与第一弧形卡盘外圈卡合,所述第二扇形齿轮能够与第三齿轮啮合。
7、优选地,所述第一轴承座上转动设有上下分布的两个第四传动轴,所述第四传动轴外圈固定安装有第四齿轮和第二弧形卡盘,两个所述第一缺角转盘外圈分别能够与两个第二弧形卡盘外圈卡合,两个所述第一扇形齿轮分别能够与两个第四齿轮啮合。
8、优选地,两个所述第四传动轴相互远离的一端均固定安装有第一圆盘,所述第一圆盘另一端固定安装有内齿环,两组所述第二轴承座上均转动设有第五传动轴,且两个第五传动轴错位分布,两个所述第五传动轴相互靠近的一端均固定安装有第五齿轮,且两个第五齿轮分别与两个内齿环啮合,两个所述第五传动轴另一端均固定安装有第二圆盘,两个所述第二圆盘另一端边缘处分别固定安装有第一圆柱和第二圆柱。
9、优选地,所述第一设备箱顶端固定安装有两个固定支架,所述固定支架上固定安装有两个滑杆,两个所述滑杆上滑动设有移动环,且第一圆柱和第二圆柱分别滑动设置在两个移动环内部,所述移动环一侧固定安装有连接座,所述连接座上固定安装有矩形柱,且矩形柱滑动设置在固定支架上,所述矩形柱两端均固定安装有齿条,一个所述矩形柱上的两个齿条分别与两个第一齿轮啮合,另一个所述矩形柱上的两个齿条分别与两个第二齿轮啮合。
10、优选地,所述充电机构包括有支撑架,所述支撑架上固定安装有供电池包充电的第二设备箱,所述第二设备箱上转动设有第四转动轴,所述第四转动轴顶端固定安装有第七锥齿轮,所述第二设备箱顶端固定安装有矩形框,所述矩形框上转动设有两个第六传动轴,所述第六传动轴上固定安装有第八锥齿轮,且两个第八锥齿轮错位分布,两个所述第八锥齿轮分别与两个第七锥齿轮啮合,两个所述第六传动轴靠近机器人本体的一端均安装有插块,两个所述第三传动轴靠近充电机构的一端均开设有插孔,且插块能够滑动插设入插孔内部。
11、优选地,所述第一转动轴、第二转动轴、第三转动轴和第四转动轴上均固定安装有上下分布的若干个摆臂组件,所述摆臂组件包括有转臂,且若干个转臂分别固定安装在第一转动轴、第二转动轴、第三转动轴和第四转动轴外圈,所述转臂另一端固定安装有固定杆,所述固定杆外圈转动设有滚筒,且滚筒能够与电池包接触。
12、与现有技术相比,本发明的有益效果在于:
13、1、本发明通过设置驱动机构带动换电机构和充电机构工作,使换电机构内部需要更换的电池包和充电机构内部充满电的电池包能够利用驱动机构进行相互更换,从而使需要更换的电池包和内部充满电的电池包分别运输至充电机构内部充电和换电机构内部使用,实现了自主导航和智能巡检功能的机器人能够自动更换电池包的效果,提高了具有自主导航和智能巡检功能的水电厂发电机层轮式机器人的使用时间,提高了机器人的使用效率;
14、2、本发明利用驱动机构的两个第三传动轴一端的插孔分别套设在两个第六传动轴一端的插块上,使第三传动轴转动能够带动第六传动轴转动,第六传动轴转动能够带动第四转动轴转动,使第四转动轴能够带动转臂对电池包进行运输;
15、3、本发明利用驱动轴转动带动第一传动轴和第四传动轴做间歇转动,第四传动轴转动带动第五传动轴转动,两个第五传动轴转动分别带动第二传动轴和第三传动轴往复转动,第二传动轴和第三传动轴往复转动分别能够带动第三转动轴和第二转动轴往复转动,利用第一传动轴间歇转动带动第一转动轴间歇转动,利用第二转动轴和第四转动轴转动带动其上的摆臂组件转动对电池包进行自动拆卸,利用第一转动轴转动带动输送盘转动对电池包进行自动运输,利用第三转动轴转动对电池包进行自动安装,从而完成对机器人电池包的自动更换。
- 还没有人留言评论。精彩留言会获得点赞!