夹持效果好的工业机器人
本发明涉及机械手,特别涉及一种夹持效果好的工业机器人。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、现有的工业机器人(如公开号为cn218255230u的专利 ),其夹持装置的夹持力大小不可调节,当夹紧物件后,仅仅只能通过动力源(电机)的继续动作增加夹紧力,而该过程夹持力是持续变化的,因此容易出现1、动力源未动作到位则夹持力不足,夹持装置松懈的问题;及易出现2、动力源动作过量,夹持力过大,破坏被夹持物的问题。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种夹持效果好的工业机器人,通过设置可调节夹持力的夹持装置可满足不同工况的需求,夹持装置处于夹紧状态时,夹持力恒定不会出现夹持力不足或过量的情况,同时夹持力调节仅需调节连接柱的偏心距即可,夹持力大小调节方便。
2、本发明的目的是通过以下技术方案来实现的:
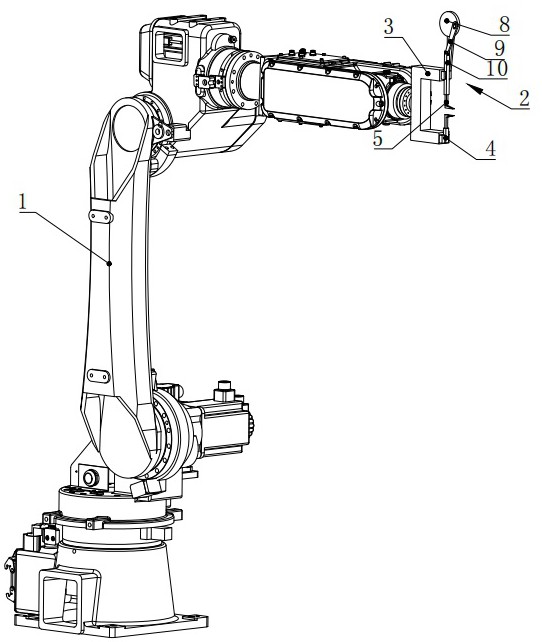
3、一种夹持效果好的工业机器人,包括多自由度的机械臂和设置在机械臂端部的夹持装置,所述夹持装置包括安装座、设置在安装座上的固定夹爪与活动夹爪,所述安装座与所述机械臂的端部相连接,所述活动夹爪由驱动构件驱动其靠近或远离固定夹爪,所述驱动构件通过改变行程调节活动夹爪与固定夹爪之间的夹持力。
4、进一步地,所述驱动构件包括支架、驱动盘、传动臂和驱动臂,所述支架与所述安装座固定连接,所述支架的第一端上设有滑轨,所述驱动盘转动设置在所述支架的第二端,所述驱动盘由第一电机驱动,所述驱动盘上偏心设置有连接柱,所述传动臂的第一端与所述连接柱相连接,所述传动臂的第二端与所述驱动臂的第一端相连接;
5、所述驱动臂的内壁设有安装腔,所述安装腔延伸至驱动臂的第二端形成开口,所述活动夹爪的一端由开口伸入所述安装腔,所述活动夹爪与安装腔底部之间设有弹簧;
6、所述连接柱可沿驱动盘径向运动,连接柱沿驱动盘径向运动时,所述驱动臂的行程改变,所述弹簧的压缩量变化。
7、进一步地,所述连接柱通过往复运动构件与所述驱动盘相连接,所述往复运动构件带动连接柱沿所述驱动盘径向运动。
8、进一步地,所述驱动盘上沿径向设有调节槽,所述调节槽的两端设有安装块,所述调节槽内设有丝杆,所述丝杆的两端分别与两个所述安装块转动连接,所述丝杆上设有螺母,所述连接柱设置在所述螺母上。
9、进一步地,所述调节槽为方形槽,所述螺母外部为与所述调节槽适配的方形结构。
10、进一步地,所述安装座为u字形结构。
11、进一步地,所述驱动臂为矩形管结构,所述活动夹爪包括连接部和夹持部,所述连接部为矩形管结构。
12、进一步地,所述丝杆通过第二电机驱动,所述第二电机设置在驱动轮远离调节槽的一面,所述第二电机与丝杆之间通过锥齿轮传动。
13、本发明的有益效果是:
14、本发明的工业机器人通过设置可调节夹持力的夹持装置可满足不同工况的需求,夹持装置处于夹紧状态时,夹持力恒定不会出现夹持力不足或过量的情况,同时夹持力调节仅需调节连接柱的偏心距即可,夹持力大小调节方便。
技术特征:
1.一种夹持效果好的工业机器人,包括多自由度的机械臂和设置在机械臂端部的夹持装置,其特征在于:所述夹持装置包括安装座、设置在安装座上的固定夹爪与活动夹爪,所述安装座与所述机械臂的端部相连接,所述活动夹爪由驱动构件驱动其靠近或远离固定夹爪,所述驱动构件通过改变行程调节活动夹爪与固定夹爪之间的夹持力。
2.根据权利要求1所述夹持效果好的工业机器人,其特征在于:所述驱动构件包括支架、驱动盘、传动臂和驱动臂,所述支架与所述安装座固定连接,所述支架的第一端上设有滑轨,所述驱动盘转动设置在所述支架的第二端,所述驱动盘由第一电机驱动,所述驱动盘上偏心设置有连接柱,所述传动臂的第一端与所述连接柱相连接,所述传动臂的第二端与所述驱动臂的第一端相连接;
3.根据权利要求2所述夹持效果好的工业机器人,其特征在于:所述连接柱通过往复运动构件与所述驱动盘相连接,所述往复运动构件带动连接柱沿所述驱动盘径向运动。
4.根据权利要求3所述夹持效果好的工业机器人,其特征在于:所述驱动盘上沿径向设有调节槽,所述调节槽的两端设有安装块,所述调节槽内设有丝杆,所述丝杆的两端分别与两个所述安装块转动连接,所述丝杆上设有螺母,所述连接柱设置在所述螺母上。
5.根据权利要求4所述夹持效果好的工业机器人,其特征在于:所述调节槽为方形槽,所述螺母外部为与所述调节槽适配的方形结构。
6.根据权利要求2所述夹持效果好的工业机器人,其特征在于:所述安装座为u字形结构。
7.根据权利要求2所述夹持效果好的工业机器人,其特征在于:所述驱动臂为矩形管结构,所述活动夹爪包括连接部和夹持部,所述连接部为矩形管结构。
8.根据权利要求4所述夹持效果好的工业机器人,其特征在于:所述丝杆通过第二电机驱动,所述第二电机设置在驱动轮远离调节槽的一面,所述第二电机与丝杆之间通过锥齿轮传动。
技术总结
本发明涉及机械手技术领域,特别涉及一种夹持效果好的工业机器人,包括多自由度的机械臂和设置在机械臂端部的夹持装置,所述夹持装置包括安装座、设置在安装座上的固定夹爪与活动夹爪,所述安装座与所述机械臂的端部相连接,所述活动夹爪由驱动构件驱动其靠近或远离固定夹爪,所述驱动构件通过改变行程调节活动夹爪与固定夹爪之间的夹持力。本发明的工业机器人通过设置可调节夹持力的夹持装置可满足不同工况的需求,夹持装置处于夹紧状态时,夹持力恒定不会出现夹持力不足或过量的情况,同时夹持力调节仅需调节连接柱的偏心距即可,夹持力大小调节方便。
技术研发人员:吴丹,宋科,王舟
受保护的技术使用者:四川航天职业技术学院(四川航天高级技工学校)
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!