一种模拟火箭布雷车的液压阀箱的制作方法
1.本实用新型涉及军事教学技术领域,尤其涉及一种模拟火箭布雷车的液压阀箱。
背景技术:
2.随着科学技术的进步,军用设施和民用设施都有着巨大的改变。现代军事对精确打击有着很高的要求,精准打击一方面可以降低成本,另一方面也可以降低对无辜民众的损害。因此,将现代科技中的遥感、遥测、导航、制导以及互联网信息技术应用导弹发射。现代军事中,火箭布雷车依然有着重要的作用,火箭布雷车可在敌人的前出装甲集群前方迅速布下雷场,但是,要实现快速的、精准的布雷,则需要操作人员熟悉火箭布雷车的操作。另外,在实际的火箭布雷车布雷过程中,操作人员主要操作的是一些控制按钮以及火箭布雷车的液压阀箱内的阀门,从而实现火箭布雷车的相关的机械结构的运动,最后实现火箭发射;液压阀箱内的阀门可以控制推弹架上升、下降、推进和退回,千斤顶支撑、收回、翻起和放下;液压阀箱内的阀门可以通过其控制装置来实现其全自动控制,但是为了保证火箭的发射,因此,也需要操作人员进行手动操作液压阀箱内的阀门。为了使新兵能够熟练的操作火箭布雷车,在非战时,需要对操作人员进行教学培训,然后反复练习布雷操作,尤其是对液压阀箱的手动操作,需要学员能够熟练掌握,以应对自动控制失灵的情况;布雷教学和练习时,考虑到学员的生命安全以及火箭弹的高昂成本,所以不便于直接实物演练;因此,需要一种不连接实际的火箭发射装置的、模拟的、火箭布雷车的液压阀箱的控制装置。
技术实现要素:
3.为了解决上述存在的问题,本实用新型提出一种模拟火箭布雷车的液压阀箱,该液压阀箱通过滑动变阻器来模拟液压阀箱内的阀门,从而使得学员能够直观的感受实际操控液压阀门,也避免了直接实际演练的安全问题,提高学员的学习效率。
4.为了实现上述目的,本实用新型采用以下方案,
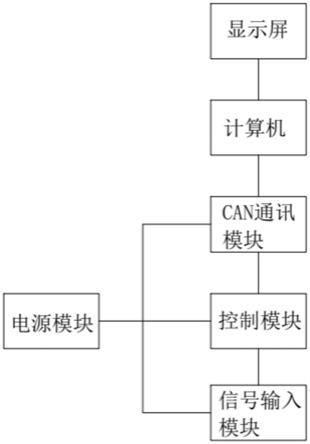
5.一种模拟火箭布雷车的液压阀箱,所述液压阀箱包括电源模块、控制模块、can通讯模块以及信号输入模块,所述电源模块连接控制模块、can通讯模块和信号输入模块,所述电源模块为控制模块、can通讯模块供电和信号输入模块;所述can通讯模块连接控制模块,用以与控制模块与外接设备的信息传输;所述信号输入模块连接控制模块,输入控制信号。
6.进一步地,所述电源模块包括24直流电源、第一转换器t1和第二转换器t2;所述第一转换器t1的型号为b2403s
‑
2wr2,第二转换器t2的型号为b2405s
‑
2wr2;所述第一转换器t1的1脚和第二转换器t2的2脚均连接24v直流电源的输出端口;所述第一转换器t1的2脚和4脚、第二转换器t2的1脚和3脚均接地;所述第一转换器t1的6脚输出5v直流电;第二转换器t2的4脚输出3.3v直流电。
7.进一步地,所述电源模块还包括电容c10、电容c12和电容c13,所述电容c10的一极连接24v直流电源的输出端口,所述电容c12的一极连接第二转换器t2的4脚,所述电容c13
的一极连接第一转换器t1的6脚,所述电容c10的另一极、电容c12的另一极、电容c13的另一极均接地。
8.进一步地,所述控制模块包括控制器ic1,所述控制器ic1的信号为mc9s08dz60,所述控制器ic1的4脚、30脚、43脚均连接第二转换器t2的4脚,接入3.3v直流电;所述控制器ic1的5脚29脚、42脚均接地。
9.进一步地,所述控制模块还包括极性电容c1、电容c2和电容c3,所述极性电容c1的正极、电容c2的一极、电容c3的一极均连接控制器ic1的4脚、30脚和43脚,所述极性电容c1的负极、电容c2的另一极、电容c3的另一极均接地。
10.进一步地,所述信号输入模块包括滑动变阻器vr1、滑动变阻器vr2、滑动变阻器vr3、滑动变阻器vr4和开关sw;所述滑动变阻器vr1的电阻丝的一端连接控制器ic1的34脚,所述滑动变阻器vr2的电阻丝的一端连接控制器ic1的35脚,所述滑动变阻器vr3的电阻丝的一端连接控制器ic1的36脚,所述滑动变阻器vr4的电阻丝的一端连接控制器ic1的37脚;所述滑动变阻器vr1的电阻丝的另一端及其滑动触点,滑动变阻器vr2的电阻丝的另一端及其滑动触点,滑动变阻器vr3的电阻丝的另一端及其滑动触点,滑动变阻器vr4的电阻丝的另一端及其滑动触点,均连接开关sw的一端;所述开关sw的另一端连接第一转换器t1的6脚,接入3.3v直流电;且所述控制器ic1的34脚与大地之间分别串联瞬态电压抑制二极管d10,所述控制器ic1的35脚与大地之间分别串联瞬态电压抑制二极管d11,所述控制器ic1的36脚与大地之间分别串联瞬态电压抑制二极管d12,所述控制器ic1的37脚与大地之间分别串联瞬态电压抑制二极管d13。
11.进一步地,所述控制模块还包括电源指示灯电路,所述电源指示灯电路包括发光二极管d1和电阻r6,所述发光二极管d1的正极连接第二转换器t2的4脚,所述发光二极管d1的负极连接电阻r6的一端,所述电阻r6的另一端接地。
12.进一步地,所述can通讯模块包括隔离式can收发器,所述隔离式can收发器的型号为iso1050dubr;所述隔离式can收发器的1脚连接第二转换器t2的4脚;所述隔离式can收发器的8脚连接第一转换器t1的6脚;所述隔离式can收发器的4脚和5脚接地;所述隔离式can收发器的2脚连接控制器ic1的22脚;所述隔离式can收发器的3脚连接控制器ic1的21脚。
13.进一步地,所述can通讯模块还包括电容c20、电容c21、电容c22、电容c23、电容c24、电阻r20、电阻r21、瞬态电压抑制二极管d20和瞬态电压抑制二极管d21;所述电容c20的一极、电容c22的一极均连接隔离式can收发器的1脚,所述电容c20的另一极、电容c22的另一极均接地;所述电容c21的一极、电容c23的一极均连接隔离式can收发器的8脚,所述电容c21的另一极、电容c23的另一极均接地;所述电阻20的一端连接隔离式can收发器的6脚,所述电阻21的一端连接隔离式can收发器的7脚,所述电阻20的另一端、电阻21的另一端均连接电容c24的一极,所述电容c24的另一极接地;所述瞬态电压抑制二极管d20的一端连接隔离式can收发器的6脚,所述瞬态电压抑制二极管d21的一端连接隔离式can收发器的7脚,所述瞬态电压抑制二极管d20的另一端和瞬态电压抑制二极管d21的另一端均接地。
14.进一步地,所述模拟火箭布雷车的液压阀箱还包括带有显示屏的计算机,所述can通讯模块连接计算机
15.本实用新型所述开关sw模拟液压阀箱内的手动控制功能是否开启的开关;由于实际液压阀箱内的阀门导通状态与关闭状态的转变是逐渐变化的过程,本实用新型以滑动变
阻器电阻的渐变来模拟阀门的导通状态与关闭状态的转变,并将这个过程通过带有显示屏的计算机显示出对应的推弹架和千斤顶的变化,从而实现学员练习手动操作火箭布雷车的液压阀箱。
16.本实用新型的优点在于,所述液压阀箱为模拟的液压阀箱,其能够实现学员练习手动操作火箭布雷车的液压阀箱,并且在没有经验的情况下即可进行操作,操作错误也不会有安全事故,这也降低了学员学习时的心理压力,提高学习效率,另外,操作液压阀箱的所带来的效果还可以在显示屏上显示,更直观的展现给学员,提高学习的效率。
附图说明
17.图1为本实用新型所述模拟火箭布雷车的液压阀箱的原理图。
18.图2为本实用新型所述模拟火箭布雷车的液压阀箱的电源模块的示意图。
19.图3为本实用新型所述模拟火箭布雷车的液压阀箱的控制模块的示意图。
20.图4为本实用新型所述模拟火箭布雷车的液压阀箱的电源指示灯电路图。
21.图5为本实用新型所述模拟火箭布雷车的液压阀箱的控制模块晶振电路图。
22.图6为本实用新型所述模拟火箭布雷车的液压阀箱的信号输入模块示意图。
23.图7为本实用新型所述模拟火箭布雷车的液压阀箱的can通讯模块示意图。
24.图8为液压阀箱的结构示意图。
25.图中:1
‑
箱体;2
‑
手动半自动切换开关;3
‑
千斤顶翻起和放下控制阀门;4
‑
千斤顶支撑和收回控制阀门;5
‑
推弹架上升和下降控制阀门;6
‑
推弹架推进和退回控制阀门。
具体实施方式
26.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
27.需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本实用新型所属领域技术人员所理解的通常意义。
28.此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。在本实用新型的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
29.在本申请中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
30.如图1所示,本实施例所述的一种模拟火箭布雷车的液压阀箱,包括电源模块、控制模块、can通讯模块以及信号输入模块,所述电源模块连接控制模块、can通讯模块和信号输入模块,所述电源模块为控制模块、can通讯模块供电和信号输入模块;所述can通讯模块连接控制模块,用以与控制模块与外接设备的信息传输;所述信号输入模块连接控制模块,输入控制信号。本实施例所述的模拟液压阀箱,为了学员能够了解液压阀箱操控后所带来
的效果,将本实施例所述液压阀箱还连接带有显示屏的计算机,本实施例所述can通讯模块连接计算机的通讯模块,传输控制信号;即学员操作液压阀箱后,然后计算机控制显示屏显示出推弹架和千斤顶的变化。
31.如图2所示,所述电源模块包括24直流电源、第一转换器t1和第二转换器t2;所述第一转换器t1的型号为b2403s
‑
2wr2,第二转换器t2的型号为b2405s
‑
2wr2;所述第一转换器t1的1脚和第二转换器t2的2脚均连接24v直流电源的输出端口;所述第一转换器t1的2脚和4脚、第二转换器t2的1脚和3脚均接地;所述第一转换器t1的6脚输出5v直流电;第二转换器t2的4脚输出3.3v直流电。该电源模块为整个模拟的液压阀箱提供稳定的工作用电。
32.为了使电源模块输入和输出的电更加稳定,也是为了保护其供电的电子芯片,所述电源模块还包括电容c10、电容c12和电容c13,所述电容c10的一极连接24v直流电源的输出端口,所述电容c12的一极连接第二转换器t2的4脚,所述电容c13的一极连接第一转换器t1的6脚,所述电容c10的另一极、电容c12的另一极、电容c13的另一极均接地。
33.如图3所示,所述控制模块包括控制器ic1,所述控制器ic1的信号为mc9s08dz60,所述控制器ic1的4脚、30脚、43脚均连接第二转换器t2的4脚,接入3.3v直流电;所述控制器ic1的5脚29脚、42脚均接地。所述控制模块主要是将输入的信号进行处理,最后再将处理后的信号通过can通讯模块传输中计算机,用于显示屏的画面显示。所述控制模块还包括复位电路,所述复位电路包括电阻r1和电容c4,所述电阻r1的一端连接第二转换器t2的4脚,所述控制器ic1的8脚、电容c4的一极连接电阻r1的另一端,所述电容c4的另一极接地。
34.如图4所示,所述控制模块还包括电源指示灯电路,所述电源指示灯电路包括发光二极管d1和电阻r6,所述发光二极管d1的正极连接第二转换器t2的4脚,所述发光二极管d1的负极连接电阻r6的一端,所述电阻r6的另一端接地。所述发光二极管d1发光则代表电源模块可为控制器ic1供电。
35.如图5所示,所述控制模块还包括晶振电路,所述复位电路包括电阻r5、晶振y1、电容c7和电容c8,所述电阻r5的一端、晶振y1的一端、电容c7的一极连接控制器ic1的6脚,所述电阻r5的另一端、晶振y1的另一端、电容c8的一极连接控制器ic1的7脚,所述电容c7的另一极和电容c8的另一极接地。
36.为了保护所述控制芯片,并且保证输入的直流电的稳定,所述控制模块还包括极性电容c1、电容c2和电容c3,所述极性电容c1的正极、电容c2的一极、电容c3的一极均连接控制器ic1的4脚、30脚和43脚,所述极性电容c1的负极、电容c2的另一极、电容c3的另一极均接地。
37.如图6所示,本实施例中,所述信号输入模块包括滑动变阻器vr1、滑动变阻器vr2、滑动变阻器vr3、滑动变阻器vr4和开关sw;所述滑动变阻器vr1的电阻丝的一端连接控制器ic1的34脚,所述滑动变阻器vr2的电阻丝的一端连接控制器ic1的35脚,所述滑动变阻器vr3的电阻丝的一端连接控制器ic1的36脚,所述滑动变阻器vr4的电阻丝的一端连接控制器ic1的37脚;所述滑动变阻器vr1的电阻丝的另一端及其滑动触点,滑动变阻器vr2的电阻丝的另一端及其滑动触点,滑动变阻器vr3的电阻丝的另一端及其滑动触点,滑动变阻器vr4的电阻丝的另一端及其滑动触点,均连接开关sw的一端;所述开关sw的另一端连接第一转换器t1的6脚,接入3.3v直流电;且所述控制器ic1的34脚与大地之间分别串联瞬态电压抑制二极管d10,所述控制器ic1的35脚与大地之间分别串联瞬态电压抑制二极管d11,所述
控制器ic1的36脚与大地之间分别串联瞬态电压抑制二极管d12,所述控制器ic1的37脚与大地之间分别串联瞬态电压抑制二极管d13。这里,各个瞬态电压抑制二极管则是为了保护控制器ic1,即瞬态电压抑制二极管可以吸收传入控制器ic1的电信号中的浪涌,从而避免控制器ic1被破坏。
38.本实施例,所述开关sw用以模拟真实液压阀箱的手动半自动切换开关,即开关sw断开则表示启用系统全自动控制推弹架和千斤顶工作,而开关sw闭合则表示启用液压阀箱进行手动控制推弹架和千斤顶工作,本实施例则是模拟手动控制液压阀箱;这里要说明的是,所述实际的液压阀箱内的阀包括控制千斤顶翻起和放下的阀门,控制千斤顶支撑和收回的阀门,控制推弹架上升和下降的阀门,控制推弹架推进和退回的阀门;本实施例中,所述滑动变阻器vr1则模拟控制千斤顶翻起和放下的阀门,即滑动变阻器vr1得阻值从最小变为最大则模拟控制千斤顶翻起,而滑动变阻器vr1得阻值从最大变为最小则模拟控制千斤顶放下;所述滑动变阻器vr2则模拟控制千斤顶支撑和收回的阀门,即滑动变阻器vr2得阻值从最小变为最大则模拟控制千斤顶支撑,而滑动变阻器vr2得阻值从最大变为最小则模拟控制千斤顶收回;所述滑动变阻器vr3则模拟控制推弹架上升和下降的阀门,即滑动变阻器vr3得阻值从最小变为最大则模拟控制推弹架上升,而滑动变阻器vr3得阻值从最大变为最小则模拟控制推弹架下降;所述滑动变阻器vr4则模拟控制推弹架推进和退回的阀门,即滑动变阻器vr4得阻值从最小变为最大则模拟控制推弹架推进,而滑动变阻器vr4得阻值从最大变为最小则模拟控制推弹架退回。
39.如图7所示,所述can通讯模块包括隔离式can收发器,所述隔离式can收发器的型号为iso1050dubr;所述隔离式can收发器的1脚连接第二转换器t2的4脚;所述隔离式can收发器的8脚连接第一转换器t1的6脚;所述隔离式can收发器的4脚和5脚接地;所述隔离式can收发器的2脚连接控制器ic1的22脚;所述隔离式can收发器的3脚连接控制器ic1的21脚。这里,所述can通讯模块主要是用于将控制信号传输给计算机,再由计算机内的程序运算并将推弹架以及千斤顶的的变化显示在显示屏上,用以学员观看学习。
40.为了使得隔离式can收发器收发信号的稳定,也是为了保护所述隔离式can收发器,所述can通讯模块还包括电容c20、电容c21、电容c22、电容c23、电容c24、电阻r20、电阻r21、瞬态电压抑制二极管d20和瞬态电压抑制二极管d21;所述电容c20的一极、电容c22的一极均连接隔离式can收发器的1脚,所述电容c20的另一极、电容c22的另一极均接地;所述电容c21的一极、电容c23的一极均连接隔离式can收发器的8脚,所述电容c21的另一极、电容c23的另一极均接地;所述电阻20的一端连接隔离式can收发器的6脚,所述电阻21的一端连接隔离式can收发器的7脚,所述电阻20的另一端、电阻21的另一端均连接电容c24的一极,所述电容c24的另一极接地;所述瞬态电压抑制二极管d20的一端连接隔离式can收发器的6脚,所述瞬态电压抑制二极管d21的一端连接隔离式can收发器的7脚,所述瞬态电压抑制二极管d20的另一端和瞬态电压抑制二极管d21的另一端均接地。
41.本实施例中所述带有显示屏的计算机,所述计算机采用型号为stm32f429zet6的处理器,采用型号为is42s16400j
‑
7tl的存储器,采用型号为vp230的can收发器,采用型号为lj64h034的显示屏,将显示屏和处理器通过型号为sn74lvc16t245的16位双电源总线收发器进行信号转接。
42.为了使本实施例所述的模拟的液压阀箱更加接近实际的液压阀箱,如图8所示,本
实施例将开关和各个滑动变阻器按照其对应的实际阀门的位置安装在箱体内,并且箱体也是按照实际液压阀箱尺寸制作。
43.本实施例工作时,首先接通电源,使得电源模块为各芯片供电,此时发光二极管d1发光,然后学员即可进行练习:先揭开液压阀箱的箱盖,此时调整各滑动变阻器的阻值到最小,然后闭合开关sw,即代表启用手动控制液压阀箱;然后学员可根据教员给出的控制指令的要求,在调整滑动变阻器的滑片的位置,从而实现控制千斤顶翻起和放下,控制千斤顶支撑和收回,控制推弹架上升和下降,并且这些控制信号会传输至计算机,并且显示屏上会显示千斤顶和推弹架的变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1