一种便携式外科手术机器人教学设备
本发明涉及教学用具,特别是涉及一种便携式外科手术机器人教学设备。
背景技术:
1、目前,随着机器人技术的发展,社会各行各业中采用机器人代替或者辅助人工工作的情况越来越多;机器人相比人工在某些可适用的操作中具有可重复性高,控制精度高等优点。例如在医疗领域的达芬奇机器人,已经可以应用到如泌尿外科、心胸外科、妇科、腹部外科等一些常规简单的手术中。医疗机器人一般主要包括主手控制端、中间传动部分、从手器械末端,操作者如医生通过在主手控制端操作来控制从手器械端的运动和手术操作。
2、随着医疗机器人产业的飞速发展,对智能控制的机器人操作的人才需求越来越多,也越来越高,学校或者培训机构的教学需求相应增加,主要是针对医疗机器人的动作控制技术的教育和学习。
3、而现有的与医疗机器人相关的教学设备十分罕见,例如在医疗机器人方面,很多教学设备都由用于临床的手术机器人直接改造而成,基本靠电机驱动以实现自动化或半自动化控制,且这部分设备大都只面向医学院类院校的学生教学使用,面向培养未来的医生操作者,而不是技术发展者如工程师,而且这些设备都没有考虑设备的可靠性问题。因教学设备所面临的操作者往往是初学者,误操作和暴力操作在所难免。
4、另外,这些设备由于是利用临床的手术机器人直接改造而成,其价格成本昂贵,根本无法普及应用到普通的工程教学中。现有技术没有专门针对医疗机器人的工作原理和机构传动原理的教学设备。
5、因此,现有技术还有待于改进和发展。
技术实现思路
1、鉴于上述现有技术的不足,本发明的目的在于提供一种便携式外科手术机器人教学设备,旨在解决现有的教学设备结构复杂,成本过高,不方便移动,无法满足广大工程类人才的培养学习需求的问题。
2、本发明的技术方案如下:
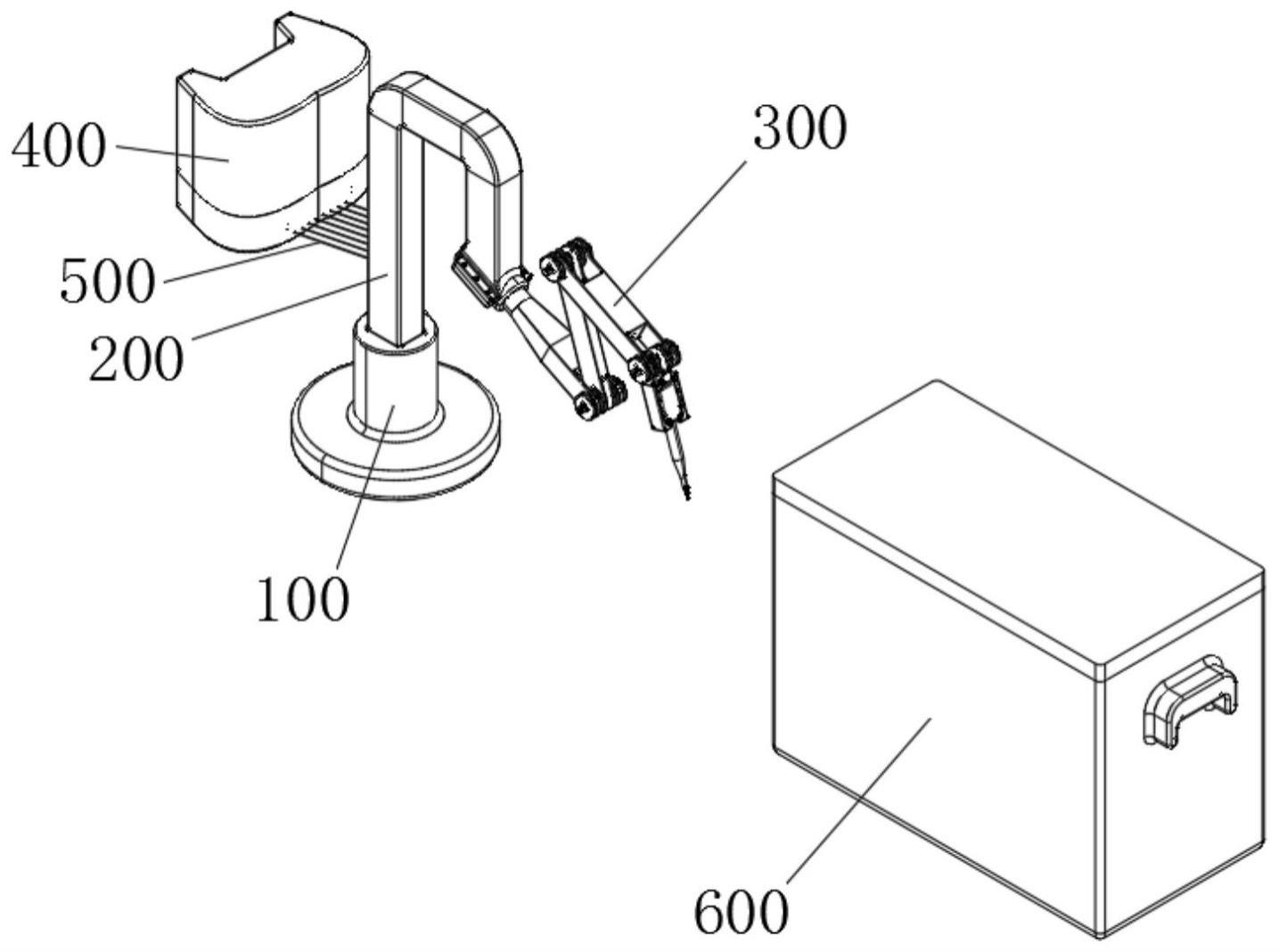
3、一种便携式外科手术机器人教学设备,其中,包括底座、基架、机械臂、操作手柄和传动绳组,所述基架与所述底座插接,所述基架内形成有两端开口的中空通道;所述机械臂可拆卸设置在所述基架上;所述传动绳组设于所述中空通道内,并且所述传动绳组包括分别从所述中空通道的两个开口伸出的第一端和第二端,所述第一端与所述机械臂传动连接,所述第二端与所述操控手柄传动连接。
4、所述的便携式外科手术机器人教学设备,其中,所述基架上设有连接槽,所述连接槽的横截面形状为圆形;所述机械臂包括至少两个轴承、连杆组件和机械手,至少两个所述轴承间隔设置在所述连接槽内;所述连杆组件与所述轴承的内圈连接;所述机械手与所述连杆组件背离所述连接槽的一端连接;所述传动绳组包括第一传动绳,所述第一传动绳一端与所述操控手柄连接,另一端与所述连杆组件连接,用于带动所述连杆组件在所述连接槽内转动。
5、所述的便携式外科手术机器人教学设备,其中,所述连杆组件包括依次铰接连接的第一连杆、第二连杆、第三连杆和第四连杆,所述第一连杆上与所述连接槽连接的一端设置装配有所述轴承;所述第四连杆与所述机械手连接;所述第一连杆的外表面上设有第一螺旋绳槽,所述第一传动绳适配在所述第一螺旋绳槽内,用于驱动所述第一连杆的转动。
6、所述的便携式外科手术机器人教学设备,其中,所述第一连杆上与所述第二连杆铰接的一端固定设置有第二螺旋绳槽;所述第二连杆上与所述第一连杆铰接的一端固定设置有第三螺旋绳槽,与所述第三连杆铰接的一端固定设置有第四螺旋绳槽;所述第三连杆上与所述第二连杆铰接的一端固定设置有第五螺旋绳槽;所述第四连杆上与所述第三连杆铰接的一端固定设置有第六螺旋绳槽;所述传动绳组包括第二传动绳,所述第二传动绳排布适配在所述第三螺旋绳槽内,用于带动所述第二连杆转动;所述连杆组件还包括第一同步绳环和第二同步绳环,所述第一同步绳环排布适配在所述第二螺旋绳槽和所述第五螺旋绳槽内,用于带动所述第三连杆与所述第二连杆同步转动;所述第二同步绳环排布适配在所述第四螺旋绳槽和所述第六螺旋绳槽内,用于带动所述第四连杆与所述第二连杆同步转动。
7、所述的便携式外科手术机器人教学设备,其中,所述第一连杆与所述第二连杆铰接的一端设有第一轴杆,所述第一轴杆位于所述第二螺旋绳槽和所述第三螺旋槽的中心位置;所述第二连杆与所述第三连杆铰接的一端设有第二轴杆,所述第二轴杆位于所述第四螺旋绳槽和所述第五螺旋槽的中心位置;所述第三连杆与所述第四连杆铰接的一端设有第三轴杆,所述第三轴杆位于所述第六螺旋绳槽的中心位置;在所述第一轴杆、第二轴杆、第三轴杆上分别设有过绳槽,所述传动绳组包括至少一第三传动绳,所述第三传动绳用于与所述机械手传动连接,并设置依次绕过所述过绳槽。
8、所述的便携式外科手术机器人教学设备,其中,所述操控手柄包括壳体、底盘、基座、轴杆组件、一平衡盘和一约束组件,所述底盘设于所述壳体上,所述底盘的中心位置形成有中心孔;所述基座与所述壳体连接,位于所述中心孔内;所述轴杆组件与所述基座万向传动连接;所述平衡盘嵌套在所述轴杆组件上,所述平衡盘上环绕所述轴杆组件交错设置有用于连接所述传动绳组的第一连接部和第二连接部,所述第一连接部与所述轴杆组件之间的连线方向为第一方向,所述第二连接部与所述轴杆组件之间的连线方向为第二方向,所述第一方向与所述第二方向垂直;所述第一方向所在的竖直平面为第一平面;所述第二方向所在的竖直平面为第二平面;所述约束组件连接在所述底盘与所述平衡盘之间,用于约束所述轴杆组件控制可仅在所述第一平面内转动或仅在所述第二平面内转动。
9、所述的便携式外科手术机器人教学设备,其中,所述便携式外科手术机器人教学设备还包括收纳盒,所述收纳盒包括外盒体、第一内盒和第二内盒,所述外盒体内形成有空腔,所述空腔的底部设有支撑台阶;所述第一内盒设置在所述支撑台阶上,所述第一内盒的下方形成有第一收纳槽,用于收纳所述基架;并且,所述第一内盒上形成有用于收纳所述底座的第二收纳槽和用于收纳所述操控手柄的第三收纳槽;所述第二内盒堆叠在所述第一内盒上,所述第二内盒上形成有用于收纳所述机械臂的第四收纳槽和用于收纳所述传动绳组的第五收纳槽。
10、所述的便携式外科手术机器人教学设备,其中,所述底座上设有用于与所述基架插接的安装槽,所述安装槽的横截面形状为多边形。
11、所述的便携式外科手术机器人教学设备,其中,所述底座、所述基架和所述机械臂均通过3d打印方式成型。
12、所述的便携式外科手术机器人教学设备,其中,所述底座为透明底座;所述基架为透明基架;所述机械臂为透明机械臂。
13、与现有技术相比,本发明实施例具有以下优点:
14、本发明公开的便携式外科手术机器人教学设备,通过采用将底座、基架、机械臂等几个部分模块化的设置,不使用时可以分开独立收纳,使用时可将基架插到底座上,并将机械臂与基架组装,然后通过传动绳组一端连接操控手柄,另一端穿过基架连接机械臂,实现绳驱操作机械臂,以完成各种动作,方便在教学过程中对机器人的控制步骤、控制方法、控制原理等作出示范演示;也就是说,教学人员可以携带本发明公开的便携式外科手术机器人教学设备,教学过程中随时进行演示,演示完可以及时收纳和移动,提高了便携式外科手术机器人教学设备的使用灵活度,降低了对使用场所的要求。
15、另外,本发明公开的机械臂完全通过绳驱驱动,不含任何电子零部件,更方便携带和组装,有利于适用各种教学场合,使得除医学院的学生外,工程类学生也可以在教学过程中更直观地学习到医疗机器人等高端设备的工作原理、机构传动原理和设计原理,弥补了我国医疗机器人行业技术方面的不足;而且,反复拆装使用的过程中不影响传动的可靠性,相较于传统的齿轮传动、电机驱动的方式,驱动过程中无振动、无冲击,稳定性好。
16、进一步的,本实施例公开的便携式外科手术机器人教学设备为纯机械传动,不需要外接电源驱动,结构设计上更加轻便,而且造价便宜,降低了设备生产成本。
- 还没有人留言评论。精彩留言会获得点赞!