载体结构、透镜驱动装置、摄像装置及电子设备的制作方法
1.本实用新型涉及潜望式对焦技术领域,特别涉及一种载体结构、透镜驱动装置、摄像装置及电子设备。
背景技术:
2.多摄像头手机己经成为现在智能手机的标配,由于采取了传统设计,多摄像头设计会限制手机的焦距,使得长焦凸轮变焦难以超过2倍。潜望式镜头通过将镜片横向排列,借助特殊的光学棱镜,让光射入镜头组,实现成像。这样的设计也不会使手机变得很厚,更重要的是,潜望式镜头可以让图像变得更加稳定。
3.在中国实用新型专利公布号为cn112684568a中公开了一种具有连续光学变焦的潜望式马达,其具有被隔挡支架相互隔开的第一被驱动组件和第二被驱动组件。但是这种线性驱动装置中,多个被驱动组件即变焦镜头支架也可以称为镜头载体,它们都是包括载体本体和设置在本体一侧的透镜支架,透镜支架用于设置透镜组件。由于透镜支架的存在,载体两侧都需要设置较大的安装空间,增大了最终产品的体积。
技术实现要素:
4.本实用新型的目的是针对上述问题,提供一种可以解决上述技术问题,实现小体积载体结构。
5.为达到上述目的,本实用新型采用了下列技术方案:一种载体结构,包括载体本体,本载体结构还包括:凹凸结构,设于载体本体的一侧,凹凸结构用于与透镜承载组件相应设置的凹凸配合结构凹凸配合连接。
6.上述一种载体结构,所述凹凸结构为设置在载体本体靠近光轴一侧的至少一夹持槽。
7.上述一种载体结构,所述夹持槽为燕尾槽。
8.上述一种载体结构,所述的夹持槽与光轴呈垂直分布。
9.上述一种载体结构,所述凹凸结构包括设置在载体本体靠近光轴一侧的至少一外凸凸块。
10.上述一种载体结构,所述的外凸凸块为燕尾凸块。
11.一种透镜驱动装置,具有上述载体结构。
12.一种摄像装置,具有上述透镜驱动装置。
13.一种电子设备,具有上述摄像装置。
14.与现有的技术相比,本实用新型的优点在于:
15.本实用新型载体结构不在需要设置在载体一侧的透镜支架,而是在载体一侧设置凹凸结构,特别是燕尾形凸块或者燕尾形凹槽结构,从而实现与透镜组件的连接。燕尾形的凹凸结构不仅能够牢固的夹持住透镜组件,同时还减轻了整体的重量,简化了载体结构,节省了载体在外框内的安装空间。
附图说明
16.图1是本实用新型一种连续变焦马达驱动系统实施例一的结构示意图。
17.图2是图1的装配图。
18.图3是一种连续变焦马达驱动系统未设置壳体的结构示意图。
19.图4是一种连续变焦马达驱动系统的磁吸结构示意图。
20.图5是本一种连续变焦马达驱动系统中第一载体和第二载体以及电机驱动及电源板结构示意图。
21.图6是图5未设置电源板的结构示意图。
22.图7是本实用新型一种连续变焦马达驱动系统中第一载体和第二载体结构示意图。
23.图8是本实用新型一种连续变焦马达驱动系统中第一载体和第二载体在导杆上的串联结构示意图。
24.图9是本实用新型一种连续变焦马达驱动系统中框体结构示意图。
25.图10是实施例二的结构示意图。
26.图11是本实用新型实施例二的第一载体和第二载体结构示意图。
27.图12是本实用新型实施例二的第一载体和第二载体的串联结构示意图。
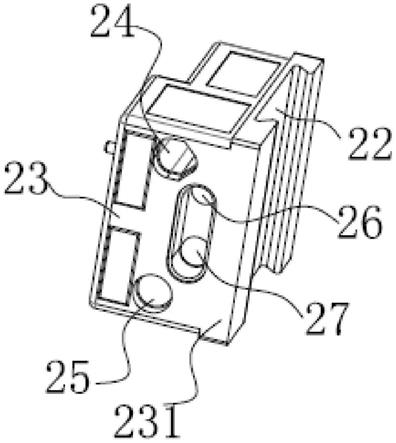
28.图13是本实用新型实施例二的第一载体结构示意图。
29.图14是本实用新型实施例二的第二载体结构示意图。
30.图15是磁吸结构中的定子板与外框的结构示意图。
31.图16是图1的俯视图。
32.图17是图16的a-a剖视图。
33.图18是实施例四中电机结构示意图。
34.图19是实施例三中的限位板结构示意图。
35.图20是实施例五中的摄像装置结构示意图。
36.图21是实施例六中的电子设备结构示意图。
37.图中,外框1,第一外框透镜支架11,第二外框透镜支架12,第一载体2,第一透镜支架21,第一载体燕尾槽22,第一载体固定块23,第二载体3,第二透镜支架31,第二载体燕尾槽32,第二载体固定块33,第二载体侧壁凹槽331,电机4,电机避让槽40,第二载体驱动机构50,固定罩壳51,磁石52,线圈53,固定夹54,丝杆41,轴套42,5,壳体6,fpc板61,第一导杆7,第二导杆8,第三导杆70,第四导杆80,盖板9,透镜组件10,第一透镜组件101,第二透镜组件102,第一燕尾凸块103,第二燕尾凸块104,磁吸结构90,动子91,定子92。
具体实施方式
38.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
39.实施例一
40.如图1、图2和图3所示,一种连续变焦马达驱动系统,包括壳体6、盖板9、外框1、第一载体2、第一透镜支架21、第二载体3、第二透镜支架31,第二载体3还通过第三导杆70、第四导杆80和固定罩壳51与第一载体2相连;外框1上设置有相互平行的第一导杆7和第二导
杆8,第一载体2、第二载体3和固定罩壳51可在旋进式驱动机构驱动下沿着第一导杆7和第二导杆8作线性位移。
41.如图9所示,外框1为四方形框体,其中四方形框体的两个平行边上分别设置有第一外框透镜支架11和第二外框透镜支架12。四方形框体的其余两个平行边分别为第一挡墙13和第二挡墙14。第一外框透镜支架11和第二外框透镜支架12的右侧还分别设置有第一右挡墙111和第二右挡墙121,第一外框透镜支架11和第二外框透镜支架12的左侧分别与第一挡墙13的两端相连。第一右挡墙111和第二右挡墙121上还设置有用于固定第一导杆7和第二导杆8的固定孔。即第一导杆7和第二导杆8的两端分别固定在第一右挡墙111和第二右挡墙121上。外框框架为四周挡墙结构,结构强度更高。第二右挡墙121与第二挡墙14相交处设置有电机避让槽40,用于设置电机。如图9和图15所示,第二挡墙14一侧边延伸设置有垂直延伸板15。
42.如图7和图8所示,第一载体2包括第一载体固定块23和第一透镜支架21,第一透镜支架21位于第一载体固定块23的一侧。第一载体固定块23的另一侧侧壁上设置有动子块凹槽231,用于设置动子块91。设置有动子块凹槽231的侧壁上还设置有两个定位销232,对应的固定罩壳51上具有两个定位孔,固定夹54的定位边通过上述定位销232和固定罩壳51上的定位孔将第一载体2和固定罩壳固定在一起。
43.如图7和图8所示,第二载体3包括第二透镜支架31和第二载体固定块33,第二透镜支架31位于第二载体固定块33的一侧。第二载体固定块33的另一侧侧壁上设置有第二凹槽331,用于设置磁石52、线圈53以及传感器56。如图7所示,固定罩壳51对应第二凹槽331的位置处具有一避让槽,上述磁石52、线圈53以及传感器56通过固定框55将其固定在第二载体3上。
44.如图7和图8所示,第一载体固定块23内设置有分别用于穿设第一导杆7和第二导杆8导轨(导轨具体结构同实施例2的图13所示,即同图13中的第一导轨24和第二导轨25)。且固定罩壳51两端也设置有用于第一导杆7和第二导杆8穿设而过的通孔。第二载体固定块33内设置有用于避让第一导杆7和第二导杆8的导轨槽(导轨槽具体结构同实施例2的图14所示,即同图14中的导轨槽332)。进一步的,第二载体固定块33内同时还设置有分别用于穿设第三导杆70和第四导杆80的导轨孔(导轨孔具体结构同实施例2的图14所示,即同图14中的第一导轨孔34和第二导轨孔35)。同样,第一载体固定块23内也具有分别用于穿设第三导杆70和第四导杆80的导轨孔(导轨孔具体结构同实施例2的图13所示,即同图13中的第三导轨孔26和第四导轨孔27)。
45.本实用新型的透镜驱动装置还包括载体带动机构,所述载体带动机构连接于第一载体,并且第一载体沿着光轴轴向移动时通过载体带动机构带动第二载体跟随第一载体同步移动。如图6所示,本实施例的载体带动机构包括固定罩壳51、第三导杆70、第四导杆80和限位板58。限位板58位于固定罩壳51的末端,在本实施例中,固定罩壳51和限位板58为一体结构。远离限位板58且与限位板58呈相对位置的固定罩壳51侧壁,固定在第一载体固定块23大的侧壁231上。限位板58上具有两个避让孔,用于避让第三导杆70和第四导杆80穿过限位板58。由于限位板58与固定罩壳51为一体结构,即限位板58固定在固定罩壳51上,所以第二载体沿第三导杆70和第四导杆80作限位运动时被限位板58限位。
46.如图5和图6所示,第二载体驱动机构50包括设置在第二载体侧壁的磁石52、线圈
53和传感器56。如图5所示,fpc板61具有延伸的线圈电源片611和电机电源片612,整体呈一体软板结构。所述线圈电源片611与线圈53相连给线圈53供电。且线圈电源片611的末端和线圈53以及磁石52等一起被固定框55固定在第二载体3的第二载体侧壁凹槽331内。当线圈通电时,第二载体3在线圈磁石的相互作用下,可沿着第三导杆70和第四导杆80作线性移动。
47.如图4和图6所示,所述旋进式驱动机构包括步进电机4、电机支架43、丝杆41、丝杆螺母42,电机4输出端与丝杆41一端相连,丝杆41上还连接有丝杆螺母42;丝杆41两端架设在电机支架43上。丝杆螺母42的一端与固定罩壳51相连。如图7所示,固定罩壳51上具有一安装孔,用于安装丝杆螺母42。安装孔的一侧壁延伸设置有一延伸块57,延伸块57与固定夹54相互作用将丝杆螺母42夹住固定在固定罩壳51上。在电机作用下,丝杆螺母42连接的固定罩壳51以及第一载体和第二载体沿着丝杆41在第一导杆7和第二导杆8上作线性移动。
48.如图4所示,磁吸结构90,包括动子块91和定子板92,动子块91和定子板92可以采用磁性铁板或者磁石制成。如图15所示,外框延伸板15的内表面设置有嵌入槽,所述定子板92嵌入设置在嵌入槽内。即所述定子板92设置在外框1的延伸板15的内表面上。如图4所示,该图中没有画出外框1,实际定子板92是固定在外框1的延伸板15的内表面上的。且定子板92与动子块91设置在同一水平位置。本实施例中动子块91设置在第一载体2的第一载体固定块23侧壁上,固定在第一载体上的固定罩壳51的相应位置设置有避让槽,方便动子块91能有相应的作用面裸露出来,从而与定子板92之间相互发生磁吸作用。定子板92与动子块91相互作用的作用面长度即定子板92的长度,上述长度等于固定罩壳51在第一导杆7和第二导杆8上的单向最大行程距离。当然,动子块91和定子板92之间只要具有相互发生磁吸作用的作用面即可,具体动子块91和定子板92的设置方式并不限于上述实施例。例如也可以将动子块91朝着定子板92方向水平延伸设置成一个动子凸出板,然后将定子板92设置在外框1的第二挡墙14内壁。
49.如图16和图17所示,第二导杆8位于第一载体2的第二导轨孔25内,且第二导杆8与第二导轨孔25间隙配合,第二导轨孔25为正圆形,所以第二导杆8圆周面与第二导轨孔25孔壁面与面的接触,所以通过第二导杆8实现了第一载体2的精定位。第一导杆7位于第一载体2的第一导轨孔24内,且第一导杆7与第一导轨孔24间隙配合,但第一导轨孔24为非正圆形,所以第一导杆7圆周面与第一导轨孔24孔壁非面与面的接触,而是点与面的接触,所以通过第一导杆7实现了对第一载体2的粗定位。上述第一导杆7为粗定位设置,第二导杆8为精定位设置,这样的设置可有效防止运动卡顿现象的出现。因为如果上述均为精定位结构的话,只要部件精度或者组装精度达不到要求的话就会运作卡顿。所以上述一个精定位配合一个粗定位的结构设置,还有利于提高组装精度。但是同时也存在一个问题:当第一载体在电机丝杆作用下,沿着光轴运动时,整个第一载体会绕着第二导杆8作轻微的旋转运动,影响整个载体运动的稳定性。前述磁吸结构90即针对上述问题设置:由于动子块91和定子板92被设置成不同的磁极,从而产生相互磁吸的作用,防止第一载体发生旋转。
50.如图3所示,本实施例的透镜驱动装置的第一载体2的透镜支架21和第二载体3的第二透镜支架31的远离电机一侧直接与外框1的挡板13相邻,且相邻两者之间没有其他零部件。即第一载体2的透镜支架21和第二载体3的第二透镜支架31的远离电机一侧悬空,节省了安装空间。
51.本实施例的透镜驱动装置工作过程如下:由于第一载体2和第二载体3被第三导杆70和第四导杆80串联后固定在固定罩壳51内,同时第一载体2和第二载体3以及固定罩壳51都串联在第一导杆7和第二导杆8上。由于电机螺母与固定罩壳相连,所以在旋进式驱动机构驱动下,罩壳、第一载体以及第二载体一起在第一导杆7和第二导杆8上作线性运动。进一步的罩壳内的第二载体还可以在侧壁磁石与线圈作用下,在第一载体靠近第二载体一侧的侧壁以及固定罩壳51远离第一载体的一端壁之间作线性运动。综上所述,第二载体3和第一载体1可以有以下三种基本运动方式:
52.方式一:第二载体驱动机构50没有通电情况下,即第二载体3上的线圈磁石不工作的情况下,第二载体被固定在第一载体2上,跟着第一载体2同步运动。上述方式中,第二载体通过第三导杆70和第四导杆80串联在第一载体后在跟第二载体一起固定在固定罩壳51内,从而实现第一载体和第二载体为一整体,当然具体实施时,也可以用其他固定方式,只要时能将第二载体固定在第一载体上的方式都可以,并不限定上述实施方式。例如,可以在第三导杆70和第四导杆80两端设置固定块,将第三导杆70和第四导杆80两端固定实现。
53.方式二:第二载体驱动机构50通电的同时旋进式驱动机构也通电,此时,第二载体3被限制在第一载体靠近第二载体一侧的侧壁以及固定罩壳51远离第一载体的一端壁之间作线性运动,且第二载体还同时跟着第一载体2作同步运动。
54.方式三:旋进式驱动机构不通电,仅仅只有第二载体驱动机构50通电,此时,就只有第二载体3单独作线性运动,且第二载体3是被限制在第一载体靠近第二载体一侧的侧壁以及固定罩壳51远离第一载体的一端壁之间作线性运动;与此同时,第一载体2静止。
55.上述第二载体驱动机构50和旋进式驱动机构的工作情况可以根据实际使用情况,灵活应用。总之,一般的连续变焦马达驱动系统,只能是第一载体和第二载体单独各自运动。但是本实用新型的连续变焦马达驱动系统,可以实现第一载体和第二载体同时运动,且第二载体还可以在第一载体运动基础上作进一步运动。这样的结构使得,透镜的调焦更加多维。
56.实施例二
57.如图10所示,本实施例的其他结构与实施例一相同,其区别在于:第一载体和第二载体均为燕尾载体结构。如图13所示,第一载体2包括第一载体固定块23和设置在第一载体固定块23一侧的第一载体夹持槽,所述夹持槽在本实施例中为燕尾槽22。即所述夹持槽为敞口槽,包括槽底面和两个槽壁,且两个槽壁分别与槽底面呈锐角夹持状。实际实施中也可以将夹持槽设置成椭圆形状。
58.如图11所示,对应的设置在第一载体2上的第一透镜组件101的一端设置有与燕尾槽22配合的第一燕尾凸块103,第一透镜组件101通过第一燕尾凸块103滑入第一载体燕尾槽22,实现第一透镜组件103与第一载体的连接。同理,如图14所示,第二载体3也包括第二载体固定块33和设置在第二载体固定块33一侧的第二载体燕尾槽32,同样,第二载体3上的第二透镜组件102一端设置有与燕尾槽32配合的第二燕尾凸块104,第二透镜组件102通过第二燕尾凸块104滑入第二载体燕尾槽32,实现第二透镜组件102与第二载体的连接。具体实施时,上述燕尾形凸块跟燕尾形凹槽的位置可以相互调换,即燕尾形凹槽设置在透镜组件上,燕尾形凸块设置在载体固定块上。而且,凸块和凹槽的结构也不仅限于燕尾形,例如,可以是椭圆形,或者其他类似可以卡住的形状都可以。
59.如图12所示,第一载体2和第二载体3跟实施例1一样均串联在第一导杆7、第二导杆8、第三导杆70和第四导杆80上。
60.实施例三
61.本实施例的其他结构同实施例一和实施例二的结构相同,其区别在于:本实施例的载体带动机构包括第三导杆70、第四导杆80和限位板58。本实施例不采用固定罩壳51,直接将第三导杆70和第四导杆80远离第一载体的末端固定在限位板上,如图19所示。同时将第三导杆70和第四导杆80的另一个末端固定在第一载体上。也可以实现对第二载体的限位移动。
62.实施例四
63.本实施例的其他结构同实施例一和实施例二的结构相同,其区别在于:旋进式驱动机构包括步进电机8,如图18所示,在步进电机b的输出轴上连接有驱动齿轮c,在第二载体上连接有与驱动齿轮c啮合连接的齿条d,步进电机b启动,带动驱动齿轮c旋转并使得与齿条d连接的第二载体在光轴移动。当然步进电机b还可以是伺服电机。
64.实施例五
65.如图20所示,在实施例一、实施例二、实施例三和实施例四的基础上,本实施例提供了一种摄像装置,包括上述连续变焦透镜驱动装置,装置内的透镜支架上设置有透镜,且上述连续变焦透镜驱动装置的其中一个外框透镜支架外侧还设置有一棱镜。
66.实施例六
67.如图21所示,在实施例五的基础上,本实施例提供了一种电子设备,所述电子设备包括实施例三的摄像装置。电子设备例如手机等等。
68.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1