光控制系统的制作方法
1.本发明涉及使激光等的照射位置往复移动的光控制系统。
背景技术:
2.以往的使激光的照射位置往复移动的光学反射元件例如像专利文献1所示那样具备:反射体,对激光等进行反射;连接体,与该反射体连接,通过自身扭转从而使反射体旋转摆动;两根臂状的振动体,为使连接体产生往复的扭转而在与反射体的旋转轴交叉的方向上延伸;和驱动体,具备使这些振动体分别振动的压电元件等。这样的光学反射元件使得反射体仅在连接体的扭转方向上旋转。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2009-244602号公报
技术实现要素:
6.发明要解决的问题
7.本发明将提高光学反射元件的性能作为目的。
8.用于解决问题的技术方案
9.本公开的一个方式涉及的光控制系统具备对光进行反射并使其往复移动的光学反射元件和对光学反射元件进行控制的控制装置,在该光控制系统中,光学反射元件具备对光进行反射的反射体和分别沿着第一轴配置在夹着反射体的位置且用于使反射体摆动的第一摆动部以及第二摆动部,第一摆动部以及第二摆动部分别具备沿着第一轴配置且前端部与反射体连结的第一连接体、在与第一轴交叉的方向上延伸并与第一连接体的基端部连结的第一振动体、相对于第一轴而在第一振动体的相反侧在与第一轴交叉的方向上延伸并与第一连接体的基端部连结的第二振动体、沿着第一轴延伸且基端部与第一振动体的前端部连结并经由第一振动体使第一连接体动作的第一驱动体、沿着第一轴延伸且基端部与第二振动体的前端部连结并经由第二振动体使第一连接体动作的第二驱动体、以及相对于基体将第一振动体以及第二振动体连接为振动自如的第二连接体,控制装置在按照绕着第一轴在相同的方向上旋转的方式使第一摆动部以及第二摆动部摆动时,按照在第一摆动部的第一驱动体以及第二驱动体中分别产生光学反射元件的厚度方向上的振动的方向成为相反方向的第一部位以及第二部位的方式,使第一摆动部的第一驱动体以及第二驱动体振动,并且,按照在第二摆动部的第一驱动体以及第二驱动体中分别产生厚度方向上的振动的方向成为相反方向的第三部位以及第四部位的方式,使第二摆动部的第一驱动体以及第二驱动体振动。
10.光控制系统具备对光进行反射并使其往复移动的光学反射元件和对光学反射元件进行控制的控制装置,在该光控制系统中,光学反射元件具备对光进行反射的反射体和用于使反射体摆动的摆动部,摆动部具备前端部与反射体连结的第一连接体、与第一连接
体的基端部连结的第一振动体、在第一振动体的相反侧与第一连接体的基端部连结的第二振动体、基端部与第一振动体的前端部连结并经由第一振动体使第一连接体动作的第一驱动体、基端部与第二振动体的前端部连结并经由第二振动体使第一连接体动作的第二驱动体、以及相对于基体将第一振动体以及第二振动体连接为振动自如的第二连接体,控制装置在使摆动部摆动时,按照在摆动部的第一驱动体以及第二驱动体中分别产生光学反射元件的厚度方向上的振动的方向成为相反方向的第一部位以及第二部位的方式,使摆动部的第一驱动体以及第二驱动体振动。
11.发明效果
12.根据本发明,能够提高光学反射元件的性能。
附图说明
13.图1是示出实施方式1涉及的光学反射元件的俯视图。
14.图2是示出实施方式1涉及的光控制系统的控制结构的框图。
15.图3是示出用于使实施方式1涉及的光学反射元件动作的驱动信号的一例的说明图。
16.图4是示出实施方式1涉及的光学反射元件进行动作时的各部分的状态的立体图。
17.图5是示意性地示出针对实施方式1涉及的驱动体赋予了使其不产生拐点的谐振频率的情况和赋予了使其产生拐点的谐振频率的情况下的各振动的曲线图。
18.图6是示出实施方式2涉及的光学反射元件的俯视图。
19.图7是示出在实施方式2涉及的光学反射元件中对各部分赋予的信号的示意图。
20.图8是示出在实施方式3涉及的光学反射元件中产生的节的示意图。
21.图9是示出实施方式4涉及的反射体的俯视图。
22.图10是示出实施方式4涉及的反射体的变形例的俯视图。
具体实施方式
23.接下来,参照附图对本发明涉及的光控制系统的实施方式进行说明。另外,以下说明的实施方式均示出包括性或者具体的例子。在以下的实施方式中示出的数值、形状、材料、结构要素、结构要素的配置位置以及连接方式、步骤、步骤的顺序等为一例,其主旨并不在于限定本发明。此外,关于以下的实施方式中的结构要素之中未记载于表示最上位概念的独立技术方案的结构要素,作为任意的结构要素来说明。
24.此外,为了示出本发明,附图成为适当地进行了强调、省略、比率调整的示意性的图,存在与实际的形状、位置关系、比率不同的情况。
25.此外,在以下的说明以及附图中,将光学反射元件的厚度方向定义为z轴方向。将与光学反射元件的第一轴平行的方向定义为y轴方向,将与第一轴交叉的方向定义为x轴方向。这些x轴方向、y轴方向以及z轴方向是彼此交叉(以下实施方式中为正交)的方向。进而,关于平行以及正交等的表示相对的方向或者姿势的表现,严格来说,还包含不是该方向或者姿势的情况。例如,所谓两个方向正交,不仅意味着该两个方向完全正交,还意味着实质上正交,即,例如包含几%程度的差异。
26.[实施方式1]
[0027]
(光学反射元件)
[0028]
首先,对本发明涉及的光学反射元件100进行说明。图1是示出实施方式1涉及的光学反射元件100的俯视图。
[0029]
光学反射元件100是周期性地变更激光等光的反射角度并周期性地扫描光的照射位置的装置。如图1所示,光学反射元件100具备矩形框状的基体105、反射体110、用于使反射体110摆动的第一摆动部210以及第二摆动部220。在本实施方式中,反射体110的一部分、第一摆动部210的一部分、第二摆动部220的一部分和基体105是通过从一个基板除去不需要的部分而被一体地成型的。具体地,例如,利用在半导体制造过程中使用的蚀刻技术将硅基板的不需要的部分除去,由此反射体110的一部分、第一摆动部210的一部分、第二摆动部220的一部分和基体105被一体地形成。光学反射元件100是所谓的mems(微机电系统:micro electro mechanical systems)。
[0030]
在此,构成基板的材料没有特别限定,但优选金属、晶体、玻璃、树脂等具有机械强度以及高的杨氏模量的材料。具体地,可例示硅、钛、不锈钢、恒弹性合金钢、黄铜合金等的金属、合金等。如果使用这些金属、合金等,则能够实现振动特性、加工性优异的光学反射元件100。
[0031]
反射体110是通过摆动从而对光进行反射的部分。反射体110的形状没有特别限定,但在本实施方式的情况下,反射体110为圆形的板状,在表面具备能够将反射对象的光以高的反射率进行反射的反射部111。反射部111的材质能够任意地选定,例如,可列举金、银、铜、铝等的金属、金属化合物等。此外,反射部111也可以由多个层构成。进而,反射部111也可以通过将反射体110的表面打磨得平滑而形成。反射部111不仅可以是平面,还可以是曲面。第一轴11是通过反射体110的中心的中心轴。
[0032]
第一摆动部210以及第二摆动部220分别沿着第一轴配置在夹着反射体110的位置。具体地,第一摆动部210配置在比反射体110更靠y轴负方向,第二摆动部220配置在比反射体110更靠y轴正方向。
[0033]
第一摆动部210和第二摆动部220的基本结构相同,配置为以光学反射元件100的中心点为基准的点对称。因而,对第一摆动部210的具体结构详细地进行说明,对第二摆动部220的具体构造简单地进行说明。
[0034]
第一摆动部210具备第一连接体211、第一振动体212、第二振动体213、第一驱动体214、第二驱动体215和第二连接体216。
[0035]
第一连接体211是沿着第一轴11延伸设置的长条棒状的部位。在第一连接体211的前端部连结有反射体110,且在第一连接体211的基端部分别连结有第一振动体212的基端部以及第二振动体213的基端部。第一连接体211是用于对在前端部保持的反射体110传递动力的部位。具体地,在第一连接体211以第一轴11为中心扭转了的情况下,对反射体110传递以第一轴11为中心的旋转摆动。
[0036]
第一连接体211的形状没有特别限定,但该第一连接体211是通过自身扭转从而使反射体110旋转摆动的构件,因此成为宽度(图中为x轴方向上的长度)比反射体110窄且细的棒状。
[0037]
所谓“沿着第一轴11”,设为不仅包含如本实施方式这样第一连接体211笔直地沿着的情况,还包含如下情况:即使第一连接体211曲折状地弯曲或者锯齿形地弯折,假想地
作为整体笔直地沿着第一轴11的情况。
[0038]
此外,在本说明书以及请求的范围中,“交叉”用作不仅包含两条线接触的交叉还包含两条线不接触的立体交叉。
[0039]
包含第一振动体212以及第二振动体213的振动体是在x轴方向上延伸的部位,是用于通过振动从而使反射体110动作的臂状的部位。具体地,第一振动体212以及第二振动体213通过在以第一轴11为中心的周向上振动,从而产生用于使反射体110以第一轴11为中心进行旋转摆动的转矩。
[0040]
第一振动体212配置在与第一轴11交叉的方向上,并与第一连接体211的基端部连结。第二振动体213相对于第一轴11而在第一振动体212的相反侧,配置在与第一轴11交叉的方向上,并与第一连接体211的基端部连结。
[0041]
在本实施方式的情况下,第一振动体212是在x轴方向上延伸的矩形棒状的构件,第二振动体213是在x轴方向上在第一振动体212的相反方向上延伸的矩形棒状的构件。
[0042]
此外,第一振动体212的基端部和第二振动体213的基端部通过连结体217连结为一体。由此,第一振动体212和第二振动体213成为以第一轴11为中心而在正交方向上延伸的笔直的棒状。
[0043]
包含第一驱动体214以及第二驱动体215的驱动体是产生用于使振动体振动的驱动力的构件。第一驱动体214与第一振动体212的前端部连结,是使第一振动体212振动的构件。第二驱动体215与第二振动体213的前端部连结,是使第二振动体213振动的构件。
[0044]
第一驱动体214具备第一驱动主体部2141和第一压电元件2142。关于第一驱动主体部2141,基端部与第一振动体212的前端部连结为一体,是沿着第一轴11朝向反射体110延伸的棒状体。第一驱动主体部2141的全长(y轴方向上的长度)比第一振动体212的全长(x轴方向上的长度)要长。在第一驱动主体部2141的表面设置有第一压电元件2142。
[0045]
第一压电元件2142是在第一驱动主体部2141的表面沿着第一轴11配置的细长的板形状的压电元件。第一压电元件2142配置在第一驱动体214的包含中央部的位置。具体地,第一压电元件2142遍及第一驱动主体部2141的全长而配置。
[0046]
通过对该第一压电元件2142施加周期性地变动的电压,从而第一压电元件2142反复伸缩。与该第一压电元件2142的移动对应地,第一驱动主体部2141反复弯曲和恢复。第一驱动主体部2141中,比与第一振动体212连结的基端部突出的前端部大幅振动,第一驱动体214整体的振动能量传递到第一振动体212的前端。
[0047]
第二驱动体215也与第一驱动体214同样地具备第二驱动主体部2151和第二压电元件2152,第二驱动体215配置在相对于包含第一轴11且与反射体110的表面正交的假想面而与第一驱动体214对称的位置。第二驱动体215的基端部与第二振动体213的前端连接。此外,第二驱动体215的动作也与第一驱动体214的动作相同。
[0048]
在本实施方式的情况下,压电元件例如为薄膜层叠型压电致动器。薄膜层叠型压电致动器包含形成于驱动主体部的表面的、通过将电极和压电体在厚度方向上层叠而成的层叠体构造。由此,能够使驱动体变得更为薄型。
[0049]
另外,驱动体也可以不仅是通过压电元件的形变而振动的驱动体。作为其他的驱动体,例如,也可以具备通过与磁场、电场的相互作用而产生力的构件、装置等,通过使由外部装置产生的磁场以及电场的至少一方变化,或者使自身产生的磁场以及电场的至少一方
变化从而振动。此外,作为构成压电体的材料,能够例示锆钛酸铅(pzt)等具有高的压电常数的压电体材料。
[0050]
基体105是用于将光学反射元件100安装于外部的构造构件等的构件,具有在y轴方向上为长条的矩形框状。具体地,基体105具有分别在x轴方向上延伸且在y轴方向上对置的第一边部51以及第二边部52。此外,基体105具有分别在y轴方向上延伸且在x轴方向上对置的第三边部53以及第四边部54。
[0051]
在第一边部51的内侧中央部连结有将第一振动体212以及第二振动体213连接为振动自如的第二连接体216。第二连接体216沿着第一轴11配置,基端部与第一边部51连结,前端部经由连结体217而与第一振动体212的基端部以及第二振动体213的基端部连结。
[0052]
第二连接体216的形状没有特别限定,但该第二连接体216是通过第一振动体212以及第二振动体213的振动而自身扭转,从而相对于第一边部51容许第一连接体211的扭转的构件,因此该第二连接体216成为扭转刚性比第一连接体211高的棒状。
[0053]
另外,第二连接体216也与第一连接体211同样地,不仅可以是笔直地沿着第一轴11的情况,也可以曲折状地弯曲或者锯齿形地弯折。在这样的情况下,在第一连接体211和第二连接体216中对绕着第一轴11的扭转刚性进行比较的情况下,也是第一连接体211的扭转刚性更弱。
[0054]
接下来,对第二摆动部220的具体构造进行说明。如上所述,第二摆动部220的基本结构与第一摆动部210相同。第二摆动部220相对于第一摆动部210配置为以光学反射元件100的中心点为基准的点对称。因而,以第二摆动部220的各部分和第一摆动部210的各部分的对应关系为中心进行说明。
[0055]
第二摆动部220具备第一连接体221、第一振动体222、第二振动体223、第一驱动体224、第二驱动体225和第二连接体226。
[0056]
第一连接体221是与第一摆动部210的第一连接体211对应的部位。第一振动体222是与第一摆动部210的第一振动体212对应的部位,第二振动体223是与第一摆动部210的第二振动体213对应的部位。第一振动体222以及第二振动体223相对于第一摆动部210的第一振动体212以及第二振动体213而x轴方向上的位置关系变为相反。第一振动体222的基端部和第二振动体223的基端部通过连结体227连结为一体。
[0057]
第一驱动体224是与第一摆动部210的第一驱动体214对应的部位,第二驱动体225是与第一摆动部210的第二驱动体215对应的部位。第一驱动体224以及第二驱动体225相对于第一摆动部210的第一驱动体214以及第二驱动体225而x轴方向上的位置关系变为相反。第一驱动体224具有第一驱动主体部2241和第一压电元件2242,它们与第一驱动体214的第一驱动主体部2141和第一压电元件2142对应。第二驱动体225具有第二驱动主体部2251和第二压电元件2252,它们与第二驱动体215的第二驱动主体部2151和第二压电元件2152对应。
[0058]
第二连接体226是与第一摆动部210的第二连接体216对应的部位。第二连接体226沿着第一轴11配置,基端部与第二边部52连结,前端部经由连结体227而与第一振动体222的基端部以及第二振动体223的基端部连结。
[0059]
(光控制系统)
[0060]
接下来,对具备上述的光学反射元件100的光控制系统10进行说明。图2是示出实
施方式1涉及的光控制系统10的控制结构的框图。
[0061]
如图2所示,光控制系统10具备光学反射元件100和对光学反射元件100进行控制的控制装置20。在光学反射元件100中,多个监控元件安装在适当的位置。监控元件是将各振动体的弯曲状态作为形变进行检测的元件。通过测定来自监控元件的输出,从而能够准确地监控反射体110的摆动的状态。具体地,在第一摆动部210中,设置有对第一振动体212的形变进行检测的第一监控元件218和对第二振动体213的形变进行检测的第二监控元件219。在第二摆动部220中,设置有对第一振动体222的形变进行检测的第一监控元件228和对第二振动体223的形变进行检测的第二监控元件229。
[0062]
控制装置20具备角度检测电路21、驱动电路22和控制电路23。角度检测电路21是如下的电路,即,接收来自各监控元件(第一监控元件218、228、第二监控元件219、229)的检测信号,基于该检测信号来检测反射体110的角度信息,并将该角度信息输出到控制电路23。
[0063]
驱动电路22是如下的电路,即,基于来自控制电路23的驱动信号,向各压电元件(第一压电元件2142、2242、第二压电元件2152、2252)输出周期性的电压。
[0064]
控制电路23是如下的电路,即,基于从角度检测电路21输入的反射体110的角度信息来调整向驱动电路22输出的驱动信号,使得反射体110成为任意的角度。
[0065]
另外,在此,例示了角度检测电路21、驱动电路22和控制电路23为专用电路的情况。然而,控制装置20也可以通过包含半导体装置、半导体集成电路(ic)或者lsi(large scale integration,大规模集成电路)在内的一个或者一个以上的电子电路来执行。lsi或者ic既可以集成于一个芯片,也可以组合多个芯片来构成。
[0066]
此外,监控元件既可以设置于反射体110,也可以不设置于光学反射元件100。
[0067]
(动作)
[0068]
接下来,对光学反射元件100的动作进行说明。光学反射元件100基于控制装置20的控制而动作。控制装置20使反射体110绕着第一轴11旋转摆动。也就是说,控制装置20使第一摆动部210以及第二摆动部220绕着第一轴11在相同的方向上旋转摆动。此时,控制装置20按照在第一摆动部210的第一驱动体214以及第二驱动体215中分别产生光学反射元件100的厚度方向(z轴方向)上的振动的方向成为相反方向的第一部位以及第二部位的方式,使第一摆动部210的第一驱动体214以及第二驱动体215振动。同样地,控制装置20按照在第二摆动部220的第一驱动体224以及第二驱动体225中分别产生厚度方向上的振动的方向成为相反方向的第三部位以及第四部位的方式,使第二摆动部220的第一驱动体224以及第二驱动体225振动。
[0069]
以下,对基于控制装置20的控制方法进行说明。
[0070]
图3是示出用于使实施方式1涉及的光学反射元件100动作的驱动信号的一例的说明图。驱动信号是用于施加使各压电元件周期性地变动的ac电压的信号,成为能够使各驱动体振动的谐振频率。在图3中,作为驱动信号的一例,将第一驱动信号w1的波形和第二驱动信号w2的波形仅图示了一个周期。第二驱动信号w2相对于第一驱动信号w1成为相反相位的波形。控制装置20对第一摆动部210的第一压电元件2142和第二摆动部220的第二压电元件2252赋予第一驱动信号w1,对第一摆动部210的第二压电元件2152和第二摆动部220的第一压电元件2242赋予第二驱动信号w2。由此,第一摆动部210以及第二摆动部220绕着第一
轴11在相同的方向上旋转摆动。
[0071]
在此,例示第一摆动部210来对第一驱动信号w1和第二驱动信号w2的具体例进行说明。第一驱动信号w1被设定为以如使得在第一摆动部210的第一驱动体214以及第二驱动体215中分别产生厚度方向上的振动的方向成为相反方向的第一部位214a、215a以及第二部位214b、215b这样的模式进行谐振的谐振频率。也就是说,第一驱动信号w1也可以说基于第一摆动部210的固有频率来决定。
[0072]
第二驱动信号w2相对于第一驱动信号w1虽然为相反相位但被设定为实质上相同的频率。在本实施方式中,第一驱动信号w1和第二驱动信号w2设为以如在第一摆动部210的第一驱动体214以及第二驱动体215中分别在第一部位214a、215a与第二部位214b、215b之间具有一个拐点这样的固有模式进行谐振的频率。另外,第一驱动信号w1和第二驱动信号w2也可以是以如在第一部位214a、215a与第二部位214b、215b之间具有两个以上的拐点这样的固有模式进行谐振的频率。
[0073]
在第二摆动部220中,第一驱动信号w1与第二驱动体225对应,第二驱动信号w2与第一驱动体224对应。
[0074]
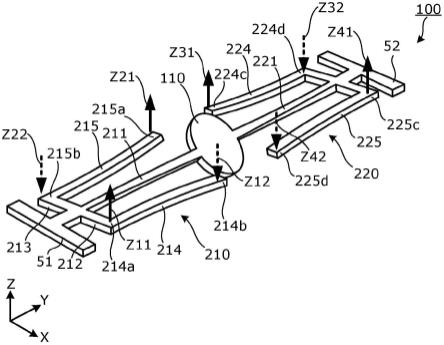
图4是示出实施方式1涉及的光学反射元件100进行动作时的各部分的状态的立体图。如图4所示,在第一摆动部210中,若通过控制装置20对第一压电元件2142赋予第一驱动信号w1并对第二压电元件2152赋予第二驱动信号w2,则在第一驱动体214以及第二驱动体215中分别产生厚度方向上的振动的方向成为相反方向的第一部位214a、215a以及第二部位214b、215b。具体地,在第一驱动体214中,第一部位214a为第一驱动体214的基端部,第二部位214b为第一驱动体214的前端部。若第一驱动体214的第一部位214a向z轴正方向移动(图4中为箭头z11),则第二部位214b向z轴负方向移动(图4中为箭头z12)。反之,若第一驱动体214的第一部位214a向z轴负方向移动,则第二部位214b向z轴正方向移动。
[0075]
在第二驱动体215中,第一部位215a为第二驱动体215的前端部,第二部位215b为第二驱动体215的基端部。若第二驱动体215的第一部位215a向z轴正方向移动(图4中为箭头z21),则第二部位215b向z轴负方向移动(图4中为箭头z22)。反之,若第二驱动体215的第一部位215a向z轴负方向移动,则第二部位215b向z轴正方向移动。
[0076]
由此,在第一摆动部210中,第一驱动体214以及第一振动体212和第二驱动体215以及第二振动体213在以第一轴11为中心的周向上,在同一方向上旋转摆动。
[0077]
另一方面,在第二摆动部220中,若通过控制装置20对第二压电元件2252赋予第一驱动信号w1并对第一压电元件2242赋予第二驱动信号w2,则在第一驱动体224以及第二驱动体225中分别产生厚度方向上的振动的方向变为相反的第三部位224c、225c以及第四部位224d、225d。具体地,在第一驱动体224中,第三部位224c为第一驱动体224的前端部,第四部位224d为第一驱动体224的基端部。若第一驱动体224的第三部位224c向z轴正方向移动(图4中为箭头z31),则第四部位224d向z轴负方向移动(图4中参照箭头z32)。反之,若第一驱动体224的第三部位224c向z轴负方向移动,则第四部位224d向z轴正方向移动。
[0078]
在第二驱动体225中,第三部位225c为第二驱动体225的基端部,第四部位225d为第二驱动体225的前端部。若第二驱动体225的第三部位225c向z轴正方向移动(图4中为箭头z41),则第四部位225d向z轴负方向移动(图4中为箭头z42)。反之,若第二驱动体225的第三部位225c向z轴负方向移动,则第四部位225d向z轴正方向移动。也就是说,在第二摆动部
220中,也与第一摆动部210同样地,第一驱动体224以及第一振动体222和第二驱动体225以及第二振动体223在以第一轴11为中心的周向上,在同一方向上旋转摆动。
[0079]
若像这样第一摆动部210和第二摆动部220绕着第一轴11在相同的方向上旋转摆动,则在第一连接体211、221产生以第一轴11为中心的扭转,因此反射体110也会以第一轴11为中心而旋转摆动(参照图1中的箭头y1)。在本实施方式中,若第一摆动部210和第二摆动部220绕着第一轴11在相同的方向上旋转摆动,则反射体110也在与它们相同的方向上以第一轴11为中心而旋转摆动。
[0080]
图5是示意性地示出针对实施方式1涉及的驱动体(第一驱动体214、224以及第二驱动体215、225)赋予了使其不产生拐点的谐振频率的情况(第1模式)和赋予了使其产生拐点的谐振频率的情况(第2模式)下的各振动的曲线图。可知,与第1模式相比,第2模式下的驱动体的基端部的位移更大。由此,第一振动体212、222以及第二振动体213、223也大幅地旋转摆动,因此第一连接体211、221也大幅地扭转。因此,反射体110的摆角也变大。
[0081]
(效果等)
[0082]
如以上,根据本实施方式涉及的光控制系统10,具备对光进行反射并使其往复移动的光学反射元件100和对光学反射元件100进行控制的控制装置20。光学反射元件100具备对光进行反射的反射体110和分别沿着第一轴11配置在夹着反射体110的位置且用于使反射体110摆动的第一摆动部210以及第二摆动部220。第一摆动部210以及第二摆动部220分别具备沿着第一轴11配置且前端部与反射体110连结的第一连接体211、221、在与第一轴11交叉的方向上延伸并与第一连接体211、221的基端部连结的第一振动体212、222、相对于第一轴11而在第一振动体212、222的相反侧在与第一轴11交叉的方向上延伸并与第一连接体211、221的基端部连结的第二振动体213、223、沿着第一轴11延伸且基端部与第一振动体212、222的前端部连结并经由第一振动体212、222使第一连接体211、221动作的第一驱动体214、224、沿着第一轴11延伸且基端部与所述第二振动体213、223的前端部连结并经由第二振动体213、223使第一连接体211、221动作的第二驱动体215、225、以及相对于基体105将第一振动体212、222以及第二振动体213、223连接为振动自如的第二连接体216、226。控制装置20在按照绕着第一轴11在相同的方向上旋转的方式使第一摆动部210以及第二摆动部220摆动时,按照在第一摆动部210的第一驱动体214以及第二驱动体215中分别产生光学反射元件100的厚度方向上的振动的方向成为相反方向的第一部位214a、215a以及第二部位214b、215b的方式,使第一摆动部210的第一驱动体214以及第二驱动体215振动,并且,按照在第二摆动部220的第一驱动体224以及第二驱动体225中分别产生厚度方向上的振动的方向成为相反方向的第三部位224c、225c以及第四部位224d、225d的方式,使第二摆动部220的第一驱动体224以及第二驱动体225振动。
[0083]
故此,在第一摆动部210的第一驱动体214以及第二驱动体215中分别产生厚度方向上的振动的方向成为相反方向的第一部位214a、215a以及第二部位214b、215b。由此,能够增大第一驱动体214以及第二驱动体215各自的基端部处的位移。
[0084]
另一方面,在第二摆动部220的第一驱动体224以及第二驱动体225中分别产生厚度方向上的振动的方向成为相反方向的第三部位224c、225c以及第四部位224d、225d。由此,能够增大第一驱动体224以及第二驱动体225各自的基端部处的位移。
[0085]
根据这些内容,第一振动体212、222以及第二振动体213、223也大幅地旋转摆动,
因此第一连接体211、221也大幅地扭转,从而反射体110的摆角也能够增大。因此,能够扩大反射体110的摆动范围,能够提高光学反射元件100的性能。
[0086]
此外,第一驱动体214、224以及第二驱动体215、225各自的全长,比第一振动体212、222以及第二振动体213、223各自的全长要长。
[0087]
故此,例如,第一驱动体214的全长比第一振动体212的全长要长,因此能够增大针对第一驱动体214的基端部的旋转转矩。这在其他的驱动体(第一驱动体224、第二驱动体215、225)中也是同样的。像这样,可增加针对各第一驱动体的基端部的旋转转矩,因此能够提高驱动效率。
[0088]
另外,驱动体(第一驱动体214、224、第二驱动体215、225)的全长和振动体(第一振动体212、222、第二振动体213、223)的全长的比率优选为0.15以上且0.5以下。如果是该关系,则能够使针对驱动体的基端部的旋转转矩适当地增加。
[0089]
此外,在全长比各振动体长的各驱动体中,遍及该全长而设置有压电元件(第一压电元件2142、2242、第二压电元件2152、2252)。因而,能够使压电元件的体积比较大。若压电元件的体积较大,则与之相应地能够使各驱动体产生较大的振动,因此也可提高驱动效率。
[0090]
[实施方式2]
[0091]
接下来,对实施方式2进行说明。另外,在以后的说明中,对于与上述实施方式1相同的部分,标注相同的符号,有时省略其说明。
[0092]
在实施方式2中,例示在第一振动体以及第二振动体设置了压电元件的光学反射元件100a。图6是示出实施方式2涉及的光学反射元件100a的俯视图。具体地,图6是与图1对应的图。
[0093]
如图6所示,在光学反射元件100a的第一摆动部210a中,第一振动体212a具备第三压电元件2122,第二振动体213a具备第四压电元件2132。具体地,在第一振动体212a的表面配置有第三压电元件2122。第三压电元件2122配置在第一振动体212a的包含中央部的位置。在本实施方式中,第三压电元件2122遍及第一振动体212a的全长而配置。如前所述,第一压电元件2142遍及第一驱动体214的全长而配置。因而,在第一驱动体214和第一振动体212a振动时产生的第一驱动体214和第一振动体212a的整体上的拐点包含于第一压电元件2142内。也就是说,在第一振动体212a的基点与拐点之间会包含第三压电元件2122的整体和第一压电元件2142的至少一部分。
[0094]
另一方面,在第二振动体213a的表面配置有第四压电元件2132。第四压电元件2132配置在第二振动体213a的包含中央部的位置。在本实施方式中,第四压电元件2132遍及第二振动体213a的全长而配置。如前所述,第二压电元件2152遍及第二驱动体215的全长而配置。因而,在第二驱动体215和第二振动体213a振动时产生的第二驱动体215和第二振动体213a的整体上的拐点包含于第二压电元件2152内。也就是说,在第二振动体213a的基点与拐点之间会包含第四压电元件2132的整体和第二压电元件2152的至少一部分。
[0095]
另外,在第二摆动部220a中,也是第一振动体222a具备第三压电元件2222且第二振动体223a具备第四压电元件2232,但基本上与第一摆动部210a相同,因此关于它们的说明将省略。
[0096]
这些第三压电元件2122、2222和第四压电元件2132、2232分别与控制装置20电连接。控制装置20在按照绕着第一轴11在相同的方向上旋转的方式使第一摆动部210a以及第
二摆动部220a旋转摆动时,使第三压电元件2122、2222和第四压电元件2132、2232振动。
[0097]
具体地,控制装置20对第一摆动部210a的第一压电元件2142和第四压电元件2132以及第二摆动部220a的第二压电元件2252和第三压电元件2222赋予第一驱动信号w1,对第一摆动部210a的第二压电元件2152和第三压电元件2122以及第二摆动部220a的第一压电元件2242和第四压电元件2232赋予第二驱动信号w2。图7是示出在实施方式2涉及的光学反射元件100a中对各部分赋予的信号的示意图。
[0098]
由此,在第一摆动部210a中,第一振动体212a在厚度方向上与第一驱动体214呈相反方向振动,第二振动体213a在厚度方向上与第二驱动体215呈相反方向振动。另一方面,在第二摆动部220a中,第一振动体222a在厚度方向上与第一驱动体224呈相反方向振动,并且第二振动体223a在厚度方向上与第二驱动体225呈相反方向振动。由此,例如,在第一驱动体214中,通过第一振动体212a的振动的刺激而被激励,因此更大幅地振动。这在各驱动体中都是同样的,因此第一摆动部210a以及第二摆动部220a分别会大幅地旋转摆动。
[0099]
(效果等)
[0100]
如以上,根据本实施方式,控制装置20边使第一摆动部210a的第一振动体212a在厚度方向上与第一驱动体214呈相反方向振动,边使第一摆动部210a的第二振动体213a在厚度方向上与第二驱动体215呈相反方向振动,并且,边使第二摆动部220a的第一振动体222a在厚度方向上与第一驱动体224呈相反方向振动,边使第二摆动部220a的第二振动体223a在厚度方向上与第二驱动体225呈相反方向振动。
[0101]
故此,各振动体的振动激励各驱动体,因此能够放大各驱动体的振动。因此,第一摆动部210a以及第二摆动部220a分别会大幅地旋转摆动,能够提高驱动效率。
[0102]
此外,第一驱动体214、224具备由控制装置20控制的第一压电元件2142、2242。第二驱动体215、225具备由控制装置20控制的第二压电元件2152、2252。第一振动体212a、222a具备由控制装置20控制的第三压电元件2122、2222。第二振动体213a、223a具备由控制装置20控制的第四压电元件2132、2232。第一压电元件2142、2242在第一驱动体214、224以及第一振动体212a、222a的整体中,配置在包含振动时的拐点的位置。第二压电元件2152、2252在第二驱动体215、225以及第二振动体213a、223a的整体中,配置在包含振动时的拐点的位置。
[0103]
故此,在第一驱动体214、224和第一振动体212a、222a的整体中,在第一振动体212a、222a的基点与拐点之间会包含第三压电元件2122、2222的整体和第一压电元件2142、2242的至少一部分。也就是说,在第一振动体212a、222a的基点与拐点之间包含多个压电元件,因此能够使第一驱动体214、224和第一振动体212a、222a容易激励。
[0104]
同样地,在第二驱动体215、225和第二振动体213a、223a的整体中,在第二振动体213a、223a的基点与拐点之间会包含第四压电元件2132、2232的整体和第二压电元件2152、2252的至少一部分。也就是说,在第二振动体213a、223a的基点与拐点之间包含多个压电元件,因此能够使第二驱动体215、225和第二振动体213a、223a容易激励。
[0105]
[实施方式3]
[0106]
接下来,对实施方式3进行说明。在实施方式1中,例示了如下情况,即,若第一摆动部210和第二摆动部220绕着第一轴11在相同的方向上旋转摆动,则反射体110也在与它们相同的方向上以第一轴11为中心而旋转摆动。在实施方式3中,对如下情况进行说明,即,若
第一摆动部210和第二摆动部220绕着第一轴11在相同的方向上旋转摆动,则反射体110在与它们相反的方向上旋转摆动。此外,在实施方式3中,例示实施方式1的光学反射元件100来对其控制方法进行说明。
[0107]
具体地,关于各第一连接体211、221,例如,具有在第一驱动信号w1和第二驱动信号w2被赋予给第一驱动体214、224以及第二驱动体215、225的情况下产生奇数的节的形状。例如,通过调整各第一连接体211、221的全长、剖面形状、外形等,从而成为产生奇数的节的形状。
[0108]
图8是示出在实施方式3涉及的光学反射元件100中产生的节的示意图。如图8所示,在第一连接体211、221各自的中间位置产生了一个节211s、221s。在此,所谓“节”,是指在其周边位置处第一连接体211、221的扭转的方向反转的部位。
[0109]
通过控制装置20的控制,在第一连接体211、221的基端部,产生绕着第一轴11逆时针的旋转(图8的箭头y11)时,在比节211s、221s靠前端部产生绕着第一轴11顺时针的旋转(图8的箭头y12)。由此,反射体110也顺时针地旋转。反之,在第一连接体211、221的基端部,产生绕着第一轴11顺时针的旋转时,在比节211s、221s靠前端部产生绕着第一轴11逆时针的旋转。由此,反射体110也逆时针地旋转。
[0110]
也就是说,若通过重复进行这些动作从而第一摆动部210和第二摆动部220绕着第一轴11在相同的方向上旋转摆动,则反射体110在与第一摆动部210和第二摆动部220相反的方向上旋转摆动。
[0111]
(效果等)
[0112]
如以上,根据本实施方式,关于第一摆动部210以及第二摆动部220各自的第一连接体211、221,具有当第一摆动部210以及第二摆动部220在相同的方向上旋转摆动时产生奇数的节211s、221s的形状。
[0113]
故此,若第一摆动部210和第二摆动部220绕着第一轴11在相同的方向上旋转摆动,则反射体110在与它们相反的方向上旋转摆动。此时,在第一连接体211、221内,以节211s、221s为基准而扭转的方向发生反转,因此产生振动的封闭效果。由此,用于使反射体110旋转的谐振模式,即,光学反射元件100所具有的谐振模式(驱动模式)的谐振尖锐度(q值)变高。若谐振尖锐度(q值)变高,则能够提高反射体110的摆角特性。也就是说,在实施方式3中,能够使反射体110在比实施方式1的反射体110大的范围内旋转摆动。
[0114]
另外,在本实施方式中,例示了在第一连接体211、221中分别产生一个节211s、221s的情况,但针对一个连接体的节的产生个数也可以为3以上的奇数。如果节的产生个数为奇数,那么若第一摆动部210和第二摆动部220绕着第一轴11在相同的方向上旋转摆动,则反射体110会在与它们相反的方向上旋转摆动。
[0115]
[实施方式4]
[0116]
接下来,对实施方式4进行说明。另外,在以后的说明中,对于与上述实施方式1相同的部分,标注相同的符号,有时省略其说明。
[0117]
在上述实施方式1中,例示了圆板状的反射体110,但在该实施方式4中,对应力缓和效果比圆板状的反射体110高的反射体110b进行说明。
[0118]
图9是示出实施方式4涉及的反射体110b的俯视图。如图9所示,反射体110b具备反射体主体114、多个柱部115和框体116。
[0119]
反射体主体114为圆板状,在其表面设置有反射部111。多个柱部115从反射体主体114的周缘在周向上空出给定间隔地配置。各柱部115从反射体主体114的外周面朝向外侧突出。框体116为圆环状,配置为在与反射体主体114同心的圆上。框体116与多个柱部115的前端部连结。在框体116的外周面连接有第一摆动部210的第一连接体211的前端部和第二摆动部220的第一连接体221的前端部。因而,来自第一连接体211、221的扭转、振动经由框体116以及多个柱部115而传递到反射体主体114。也就是说,来自第一连接体211、221的扭转、振动未直接地传递到反射体主体114,因此可缓和赋予给反射体主体114的应力。
[0120]
另外,只要可获得应力缓和效果,反射体的形状就可以为任何的形态。图10是示出实施方式4涉及的反射体的变形例的俯视图。如图10所示,反射体110c不具有柱部,框体116c为大致六角环状。在框体116c,在y轴方向上对置的一对角部接合有第一摆动部210的第一连接体211的前端部和第二摆动部220的第一连接体221的前端部。此外,在框体116c的内侧,在x轴方向上对置的一对边接合有反射体主体114c。像这样,即便在框体116c的一部分与反射体主体114c之间具有间隙的反射体110c中也能够获得应力缓和效果。
[0121]
[其他]
[0122]
另外,本发明不限定于上述实施方式。例如,也可以将任意地组合本说明书中记载的结构要素而实现的、或者排除结构要素中的几个结构要素而实现的其它实施方式作为本发明的实施方式。此外,在不脱离本发明的主旨的范围,即,不脱离请求的范围记载的语句所表示的意思的范围内对上述实施方式实施本领域技术人员想到的各种变形而得到的变形例也包含在本发明中。
[0123]
例如,在上述实施方式1中,在第一摆动部210的第一驱动体214以及第二驱动体215中分别产生了在厚度方向上且在相反方向上振动的第一部位214a、215a以及第二部位214b、215b。也就是说,例如,例示了如下情况,即,在第一驱动体214中,在相反方向上振动之处产生两处(第一部位214a、第二部位214b),在第二驱动体215中,在相反方向上振动之处产生两处(第一部位215a、第二部位215b)。然而,也可以在一个驱动体内,在相反方向上振动之处设置有3处以上。这在第二摆动部220的第一驱动体224以及第二驱动体225中也分别相同。
[0124]
此外,在上述实施方式1中,例示了具备第一摆动部210和第二摆动部220这两个摆动部的光控制系统10。然而,也可以在光控制系统中仅具备一个摆动部。
[0125]
产业上的可利用性
[0126]
本发明能够利用于例如小型的显示器装置、小型的投影仪、车载用的平视显示器装置、电子照片方式的复印机、激光打印机、光学扫描仪、光学雷达等的光学装置。
[0127]
符号说明
[0128]
10 光控制系统;
[0129]
11 第一轴;
[0130]
20 控制装置;
[0131]
21 角度检测电路;
[0132]
22 驱动电路;
[0133]
23 控制电路;
[0134]
51 第一边部;
[0135]
52 第二边部;
[0136]
53 第三边部;
[0137]
54 第四边部;
[0138]
100、100a 光学反射元件;
[0139]
105 基体;
[0140]
110、110b、110c 反射体;
[0141]
111 反射部;
[0142]
114、114c 反射体主体;
[0143]
115 柱部;
[0144]
116、116c 框体;
[0145]
210、210a 第一摆动部;
[0146]
211、221 第一连接体;
[0147]
211s、221s 节;
[0148]
212、212a、222、222a 第一振动体;
[0149]
213、213a、223、223a 第二振动体;
[0150]
214、224 第一驱动体;
[0151]
214a、215a 第一部位;
[0152]
214b、215b 第二部位;
[0153]
215、225 第二驱动体;
[0154]
216、226 第二连接体;
[0155]
217、227 连结体;
[0156]
218、228 第一监控元件;
[0157]
219、229 第二监控元件;
[0158]
220、220a 第二摆动部;
[0159]
224c、225c 第三部位;
[0160]
224d、225d 第四部位;
[0161]
2122、2222 第三压电元件;
[0162]
2132、2232 第四压电元件;
[0163]
2141、2241 第一驱动主体部;
[0164]
2142、2242 第一压电元件;
[0165]
2151、2251 第二驱动主体部;
[0166]
2152、2252 第二压电元件;
[0167]
w1 第一驱动信号;
[0168]
w2 第二驱动信号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1